
一种具有张力放大机制的三自由度绳索驱动并联机构.pdf

青团****青吖

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种具有张力放大机制的三自由度绳索驱动并联机构.pdf
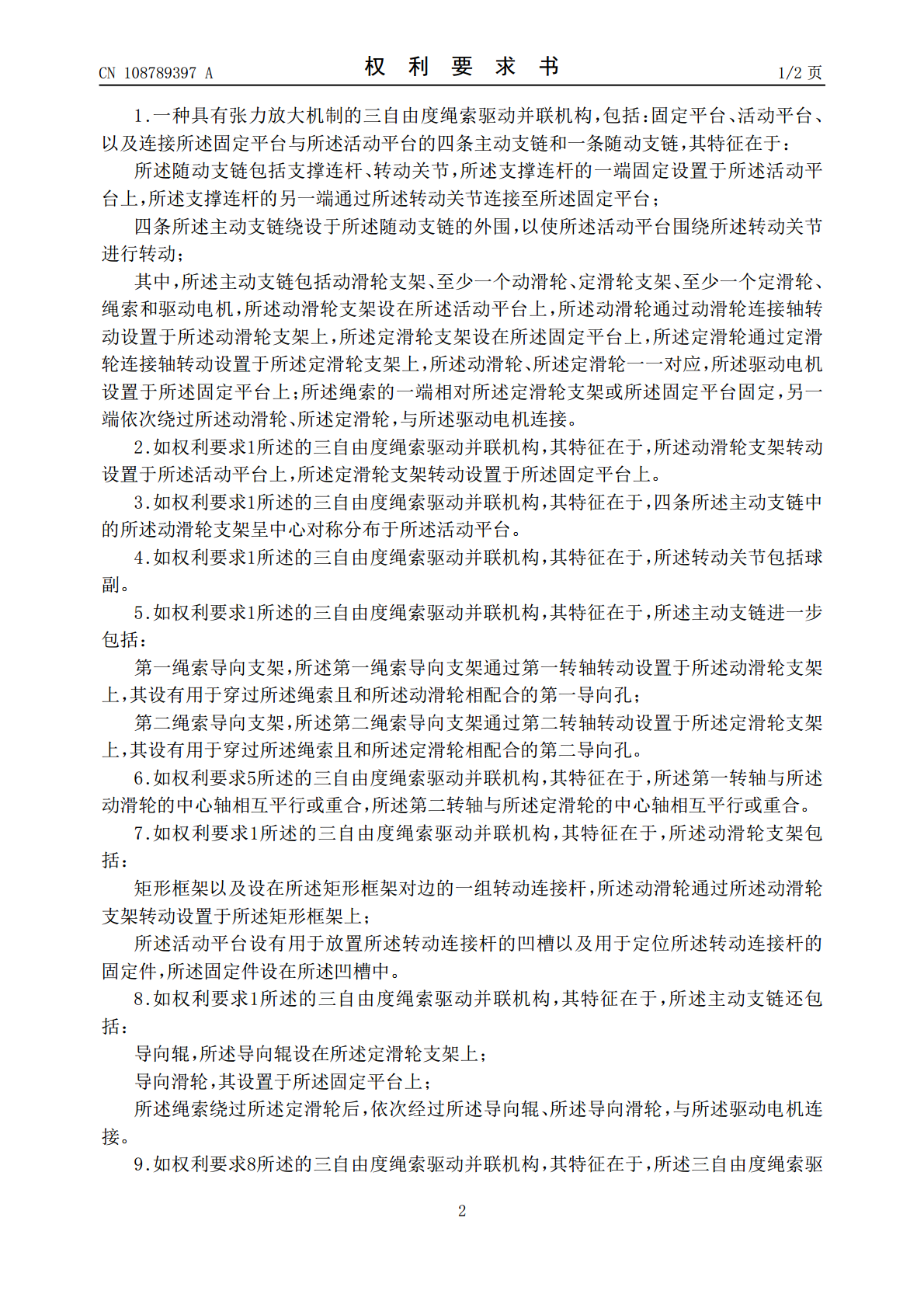
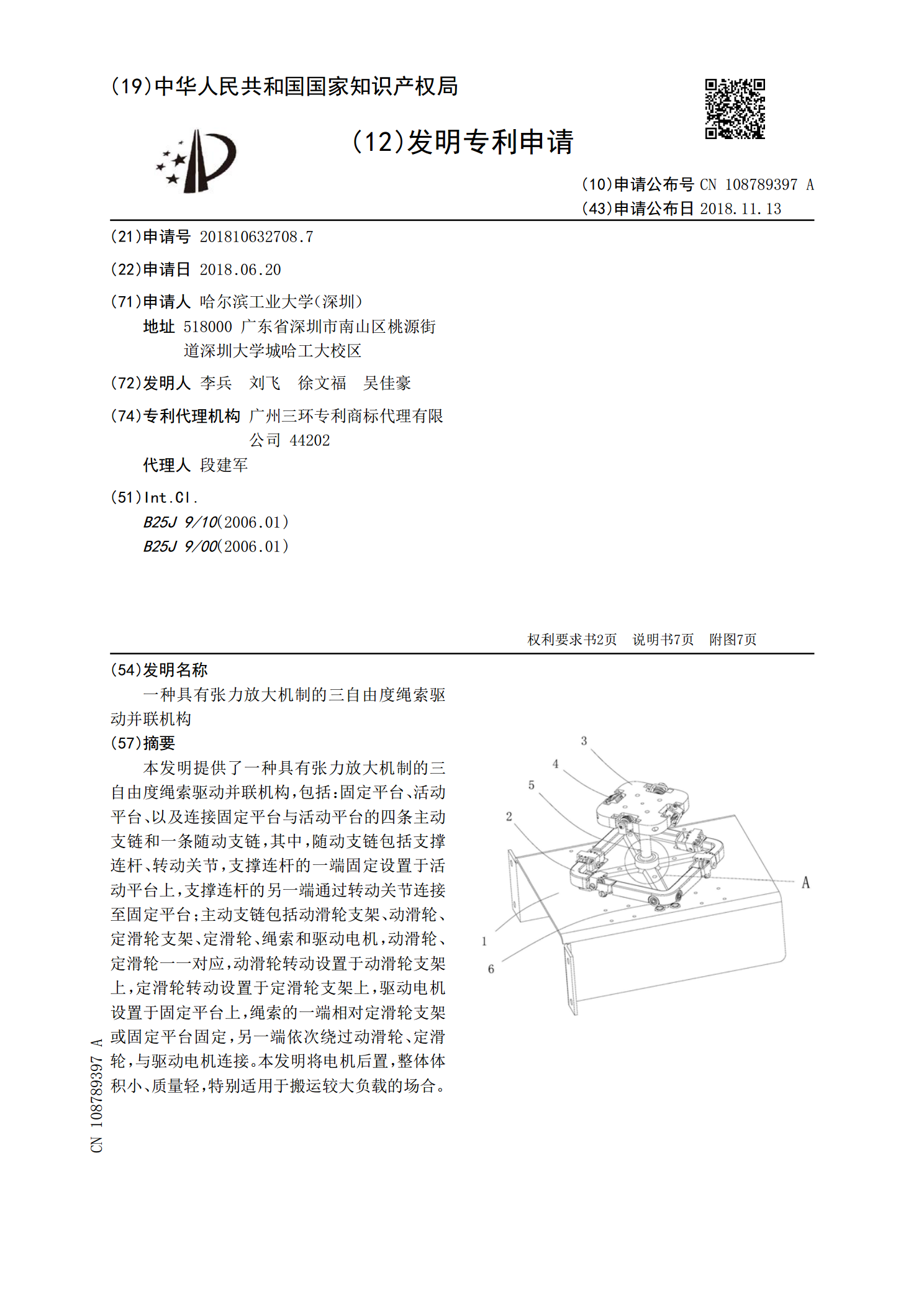
本发明提供了一种具有张力放大机制的三自由度绳索驱动并联机构,包括:固定平台、活动平台、以及连接固定平台与活动平台的四条主动支链和一条随动支链,其中,随动支链包括支撑连杆、转动关节,支撑连杆的一端固定设置于活动平台上,支撑连杆的另一端通过转动关节连接至固定平台;主动支链包括动滑轮支架、动滑轮、定滑轮支架、定滑轮、绳索和驱动电机,动滑轮、定滑轮一一对应,动滑轮转动设置于动滑轮支架上,定滑轮转动设置于定滑轮支架上,驱动电机设置于固定平台上,绳索的一端相对定滑轮支架或固定平台固定,另一端依次绕过动滑轮、定滑轮,与
二转动自由度绳索驱动式并联机构.pdf
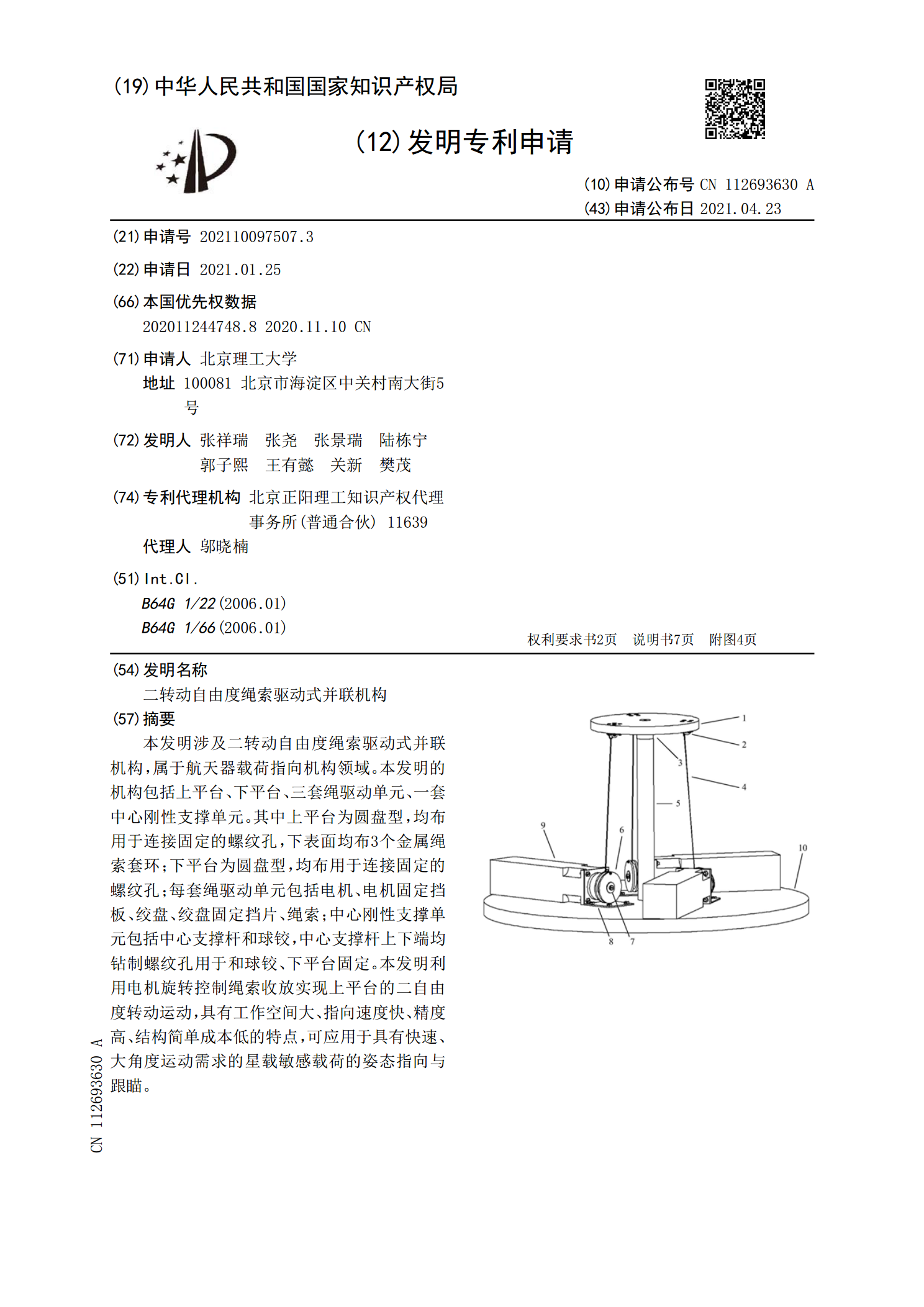
本发明涉及二转动自由度绳索驱动式并联机构,属于航天器载荷指向机构领域。本发明的机构包括上平台、下平台、三套绳驱动单元、一套中心刚性支撑单元。其中上平台为圆盘型,均布用于连接固定的螺纹孔,下表面均布3个金属绳索套环;下平台为圆盘型,均布用于连接固定的螺纹孔;每套绳驱动单元包括电机、电机固定挡板、绞盘、绞盘固定挡片、绳索;中心刚性支撑单元包括中心支撑杆和球铰,中心支撑杆上下端均钻制螺纹孔用于和球铰、下平台固定。本发明利用电机旋转控制绳索收放实现上平台的二自由度转动运动,具有工作空间大、指向速度快、精度高、结构

具有零位调节的绳索张力检测机构.pdf
本发明公开了一种具有零位调节的绳索张力检测机构,通过导向轮将绳索上的张力转换为压力传感器上的压力信号。其包括有导向轮组件、固定基座、直线轴承、压力传感器、橡胶块和固定板。其中,压力传感器通过橡胶块间隔固定在固定板上,固定板由螺钉拧紧安装在固定基座上。导向轮组件通过直线轴承顶在压力传感器的顶部,通过压紧或松开橡胶块来调整压力传感器初始压力的大小。所需测量张力大小的绳索缠绕在导向轮组件的外圈上,当绳索被拉紧时,将导向轮组件往上推,由此对压力传感器施加压力,压力传感器将所测得的压力转换为电信号,输入计算机系统,
一种绳索驱动的单自由度模块及采用其的多自由度机构.pdf
本发明提供了一种绳索驱动的单自由度模块及采用其的多自由度机构,单自由度模块包括固定平台、活动平台、连接支链和驱动支链;驱动支链包括第一定滑轮、第二定滑轮、第一动滑轮、第二动滑轮、两根绳索和绳索驱动器,第一定滑轮和第二定滑轮设在固定平台上,二者分别设在连接支链的两侧;第一动滑轮和第二动滑轮设在活动平台上,二者分别设在连接支链的两侧,并第一定滑轮和第一动滑轮设在连接支链的同侧;其中一根绳索的一端相对第一定滑轮固定,另一端绕过第一动滑轮连接至绳索驱动器;另一根绳索的一端相对第二定滑轮固定,另一端绕过第二动滑轮连

绳牵引并联机构中绳索张力解的实时性研究.docx
绳牵引并联机构中绳索张力解的实时性研究绳牵引并联机构是一种常见的机械传动结构,广泛应用于各种工程和日常生活中。在绳牵引并联机构中,绳索的张力解是一个重要的参数,它决定了机构的运动和力学特性。因此,研究绳索张力解的实时性对于优化机构设计、提升机构性能具有重要意义。为了研究绳索张力解的实时性,首先需要理解绳索张力解的基本原理和相关影响因素。在绳牵引机构中,绳索的张力解满足平衡条件,即各个绳索段的受力合力为零。张力解与绳索的长度、角度、摩擦力等因素有关。在运动过程中,机构的结构参数和工作条件会不断变化,导致绳索