
可移动式机械手臂.pdf

兴朝****45

1/5
2/5

3/5

4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
可移动式机械手臂.pdf
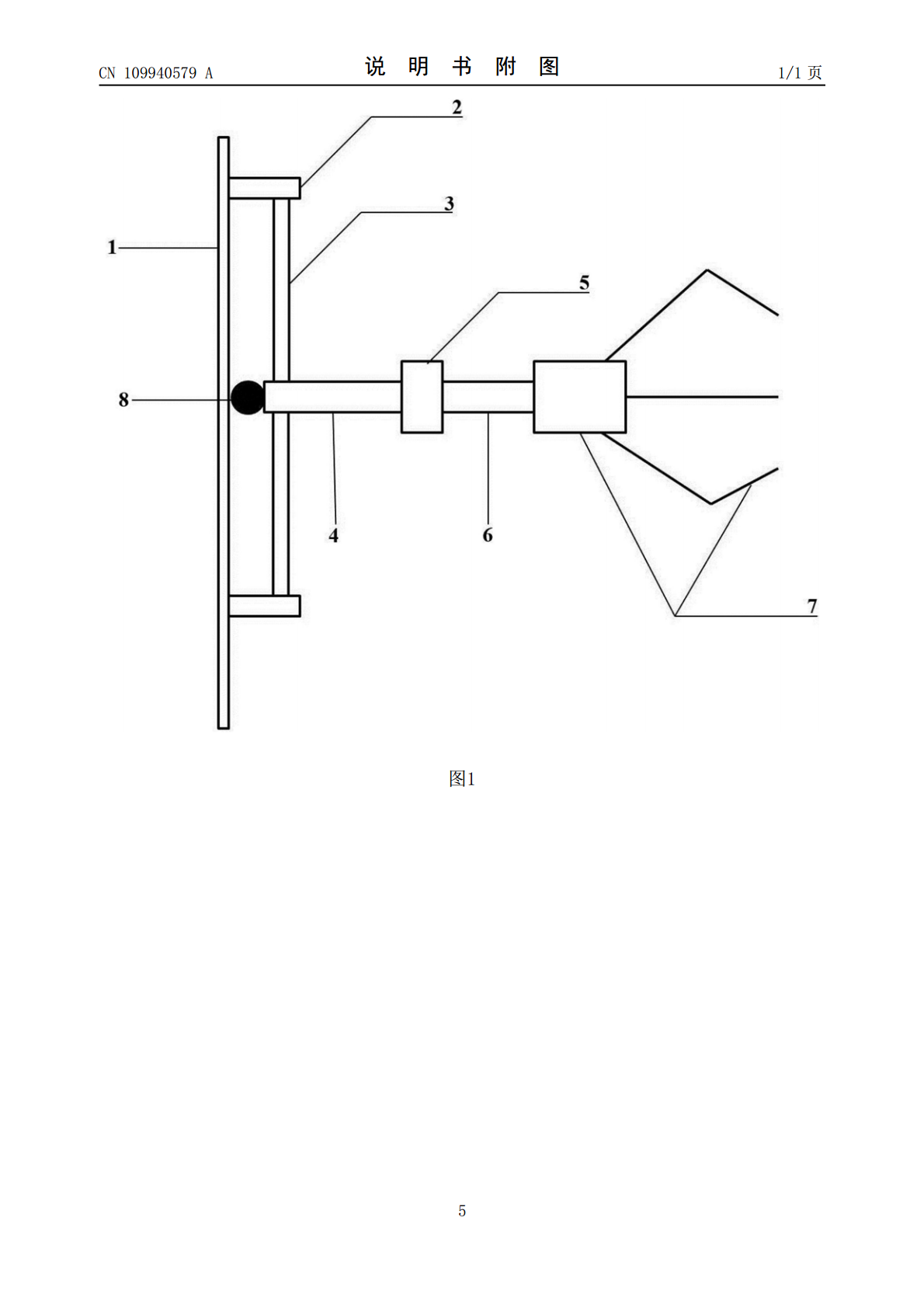
本发明提供了一种可移动式机械手臂,包括滑槽(1)、固定杆(2)、第一伸缩杆(3)、第二伸缩杆(4)、定位管(5)、连接杆(6)、机械手臂(7)、滑轮(8)。机械手臂(7)左端与连接杆(6)相连;连接杆(6)左端与定位管(5)相连;第二伸缩杆(4)右端与定位管(5)相连;第二伸缩杆(4)左端与滑轮(8)相连;滑轮(8)卡在滑槽(1)内;第二伸缩杆(4)上下两侧各连接一根第一伸缩杆(3);上下两根第一伸缩杆(3)分别与一根固定杆(2)相连;固定杆(2)连接在滑槽上下两端。本发明所述的可移动式机械手臂通过两种不

一种智能控制可移动式机械手臂.pdf
本发明公开了一种智能控制可移动式机械手臂,包括底座、电动升降杆、第一电机、机械爪、第二电机,所述电动升降杆固定安装在底座的外侧壁上,所述电动升降杆的末端固定连接有支撑板,所述支撑板的外侧壁上固定连接有固定箱,所述固定箱的内侧壁上固定安装有润滑箱,所述润滑箱的内侧壁上固定连接有分隔板,所述润滑箱的内侧壁上滑动连接有润滑机构,所述固定箱的外侧壁上固定连接有支撑杆,所述支撑杆的末端固定连接有连接箱,放置板拉动细绳向下移动,从而实现对清理管的开启,将清理箱内部压缩的气体通过清理管喷向机械爪的表面,对机械爪表面上的

一种移动式多功能机械手臂.pdf
本发明公开了一种机械手臂,尤其是涉及一种移动式多功能机械手臂。该一种移动式多功能机械手臂,移动基座上设有机械臂臂体,机械臂臂体上设有机械臂转轴与机械臂连接头、机械臂功能爪,机械臂臂体与移动基座连接处的移动基座上还设有蓄电池,所述移动基座内分别固定装有信号接收模块、信号转化模块和机械臂、基座转轮控制单元,移动基座内固定装有若干个步进电机,步进电机连接转轮转轴,转轮转轴一侧连接有基座转轮。其有益效果是:本发明可根据使用功能不同将机械手臂进行更换,可根据指令移动至指定位置进行对应的工作,给人们的日常工作带来极大
一种可移动式机械臂.pdf
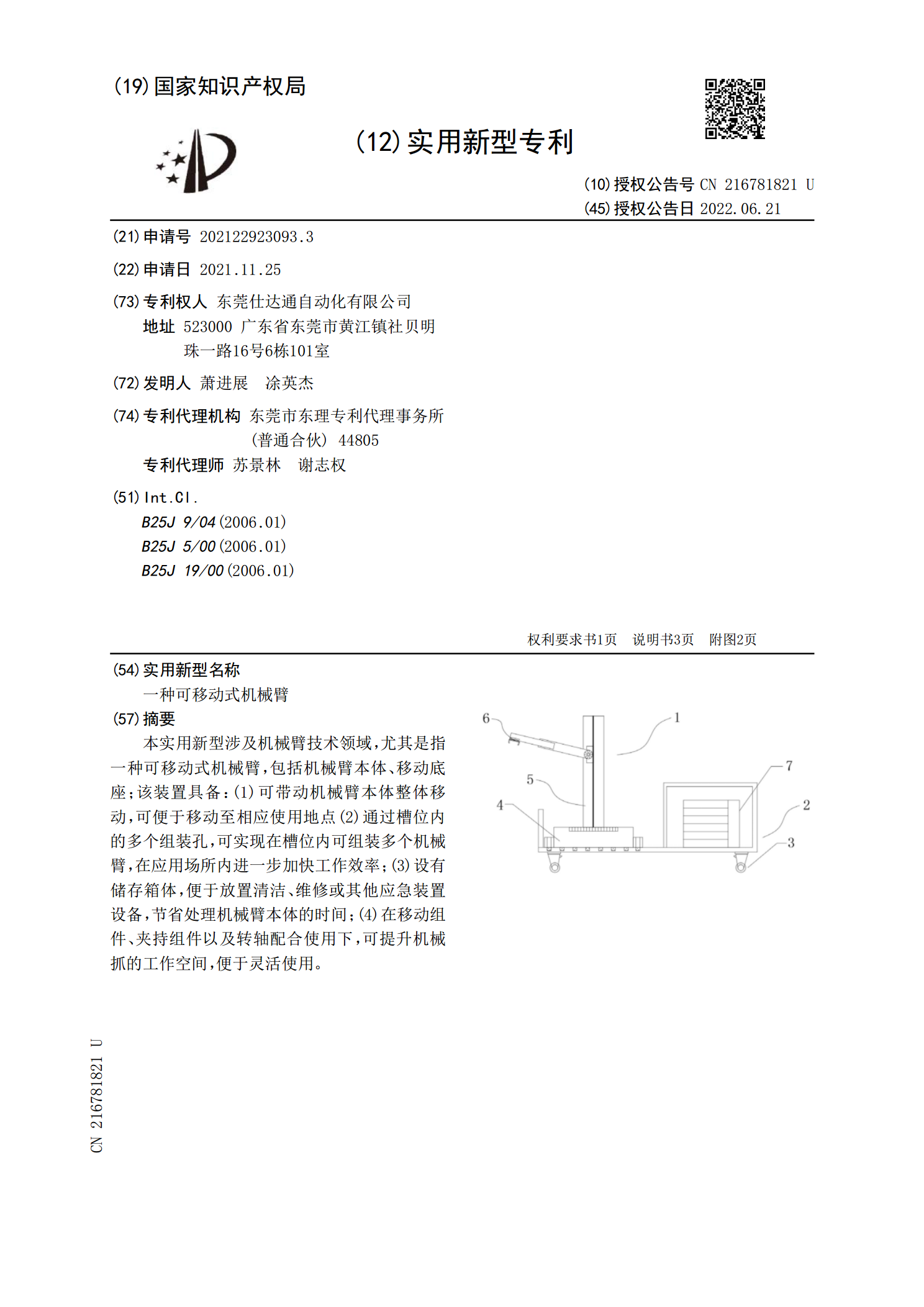
本实用新型涉及机械臂技术领域,尤其是指一种可移动式机械臂,包括机械臂本体、移动底座;该装置具备:(1)可带动机械臂本体整体移动,可便于移动至相应使用地点(2)通过槽位内的多个组装孔,可实现在槽位内可组装多个机械臂,在应用场所内进一步加快工作效率;(3)设有储存箱体,便于放置清洁、维修或其他应急装置设备,节省处理机械臂本体的时间;(4)在移动组件、夹持组件以及转轴配合使用下,可提升机械抓的工作空间,便于灵活使用。
一种穿戴式可伸缩采摘机械手臂.pdf
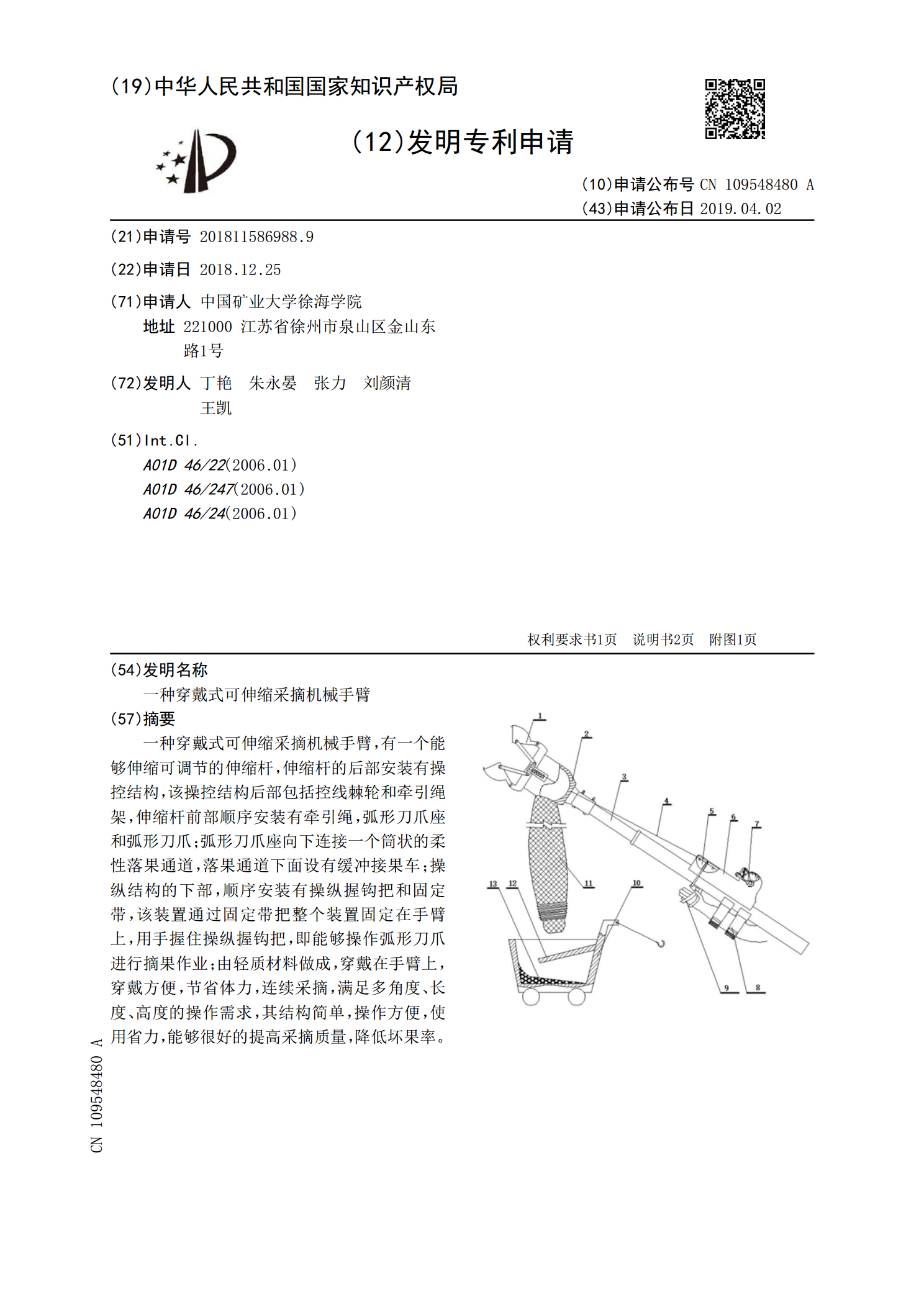
一种穿戴式可伸缩采摘机械手臂,有一个能够伸缩可调节的伸缩杆,伸缩杆的后部安装有操控结构,该操控结构后部包括控线棘轮和牵引绳架,伸缩杆前部顺序安装有牵引绳,弧形刀爪座和弧形刀爪;弧形刀爪座向下连接一个筒状的柔性落果通道,落果通道下面设有缓冲接果车;操纵结构的下部,顺序安装有操纵握钩把和固定带,该装置通过固定带把整个装置固定在手臂上,用手握住操纵握钩把,即能够操作弧形刀爪进行摘果作业;由轻质材料做成,穿戴在手臂上,穿戴方便,节省体力,连续采摘,满足多角度、长度、高度的操作需求,其结构简单,操作方便,使用省力,