
一种移动式多功能机械手臂.pdf

夏萍****文章


1/5

2/5

3/5

4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种移动式多功能机械手臂.pdf
本发明公开了一种机械手臂,尤其是涉及一种移动式多功能机械手臂。该一种移动式多功能机械手臂,移动基座上设有机械臂臂体,机械臂臂体上设有机械臂转轴与机械臂连接头、机械臂功能爪,机械臂臂体与移动基座连接处的移动基座上还设有蓄电池,所述移动基座内分别固定装有信号接收模块、信号转化模块和机械臂、基座转轮控制单元,移动基座内固定装有若干个步进电机,步进电机连接转轮转轴,转轮转轴一侧连接有基座转轮。其有益效果是:本发明可根据使用功能不同将机械手臂进行更换,可根据指令移动至指定位置进行对应的工作,给人们的日常工作带来极大
一种多功能工业机械手臂.pdf
本发明公开了一种多功能工业机械手臂,包括操作仓,所述操作仓下部设有操作底板,所述操作底板下部设有履带轮装置,所述操作仓是由固定安装在操作仓内部的操作座椅、开在操作仓侧表面上部的操作方孔、安装在操作方孔上的钢化玻璃、安装在操作仓内部侧表面下部的操作装置、安装在操作仓侧表面外部的机械手臂装置共同构成的,所述操作仓一侧表面设有喷洒装置。本发明的有益效果是,结构简单,实用性强。

一种智能控制可移动式机械手臂.pdf
本发明公开了一种智能控制可移动式机械手臂,包括底座、电动升降杆、第一电机、机械爪、第二电机,所述电动升降杆固定安装在底座的外侧壁上,所述电动升降杆的末端固定连接有支撑板,所述支撑板的外侧壁上固定连接有固定箱,所述固定箱的内侧壁上固定安装有润滑箱,所述润滑箱的内侧壁上固定连接有分隔板,所述润滑箱的内侧壁上滑动连接有润滑机构,所述固定箱的外侧壁上固定连接有支撑杆,所述支撑杆的末端固定连接有连接箱,放置板拉动细绳向下移动,从而实现对清理管的开启,将清理箱内部压缩的气体通过清理管喷向机械爪的表面,对机械爪表面上的
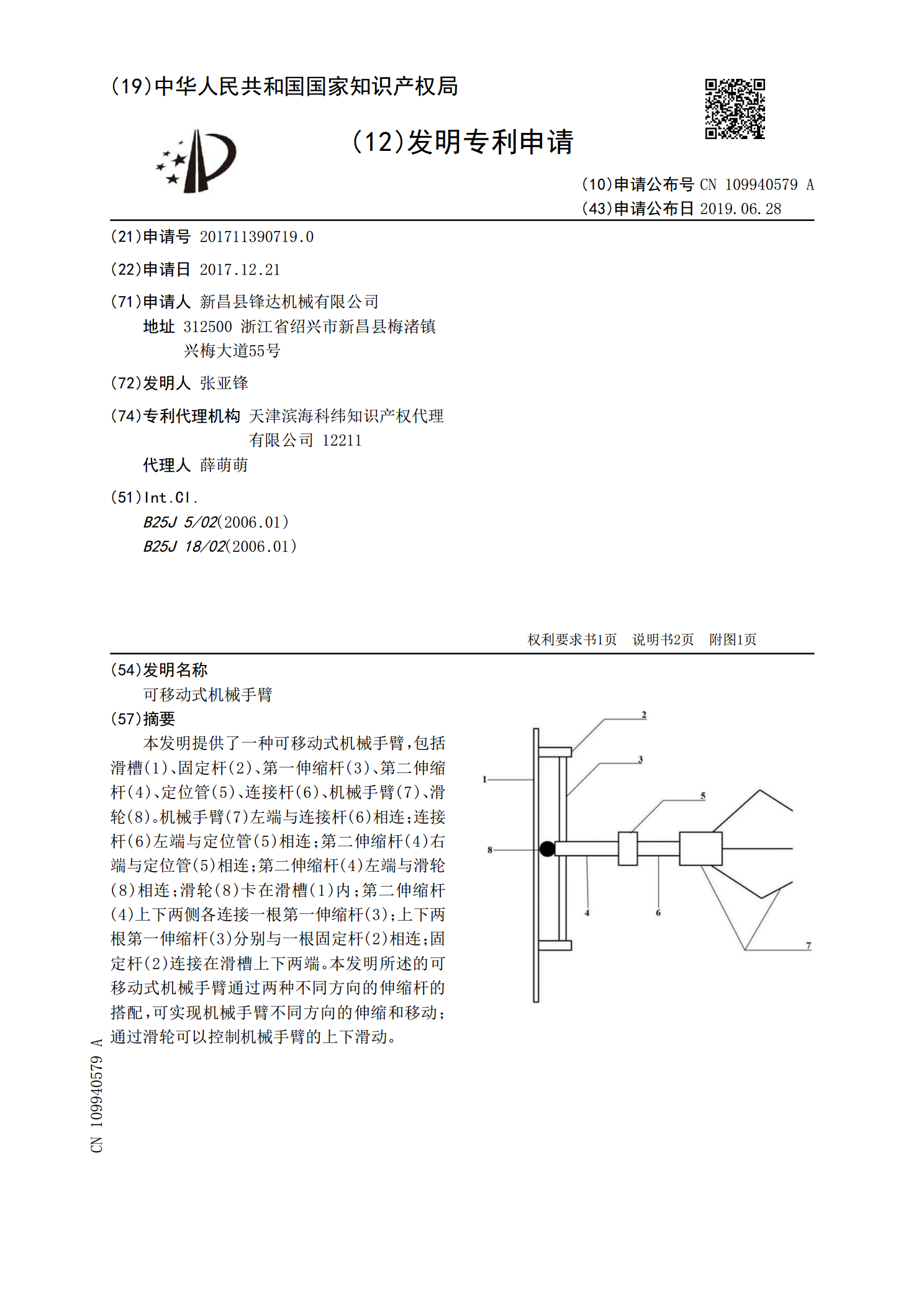
可移动式机械手臂.pdf
本发明提供了一种可移动式机械手臂,包括滑槽(1)、固定杆(2)、第一伸缩杆(3)、第二伸缩杆(4)、定位管(5)、连接杆(6)、机械手臂(7)、滑轮(8)。机械手臂(7)左端与连接杆(6)相连;连接杆(6)左端与定位管(5)相连;第二伸缩杆(4)右端与定位管(5)相连;第二伸缩杆(4)左端与滑轮(8)相连;滑轮(8)卡在滑槽(1)内;第二伸缩杆(4)上下两侧各连接一根第一伸缩杆(3);上下两根第一伸缩杆(3)分别与一根固定杆(2)相连;固定杆(2)连接在滑槽上下两端。本发明所述的可移动式机械手臂通过两种不

多功能大型机械手臂.pdf
本发明属于设备铸造技术领域,涉及一种应用于大型翻转起模机、翻转合箱机、翻转流涂机上的多功能大型机械手臂。所述多功能大型机械手臂包括轴座、转臂、碗形托爪、固定轴、托轮、翻转轴和翻转驱动装置,翻转轴安装在轴座内,翻转驱动装置安装在轴座上,翻转驱动装置的输出轴与翻转轴相连接并带动翻转轴转动;转臂的中部固定连接在翻转轴上,转臂在翻转轴的带动下转动;转臂的两端分别安装有固定轴,碗形托爪安装在固定轴上并能够绕固定轴灵活转动;在碗形托爪内设有两个轴对称布置且能自由转动的托轮。本发明构巧妙合理、操作灵活平稳、自动化程度高