
一种搭载机械臂的智能作业车.pdf

秀华****魔王

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种搭载机械臂的智能作业车.pdf
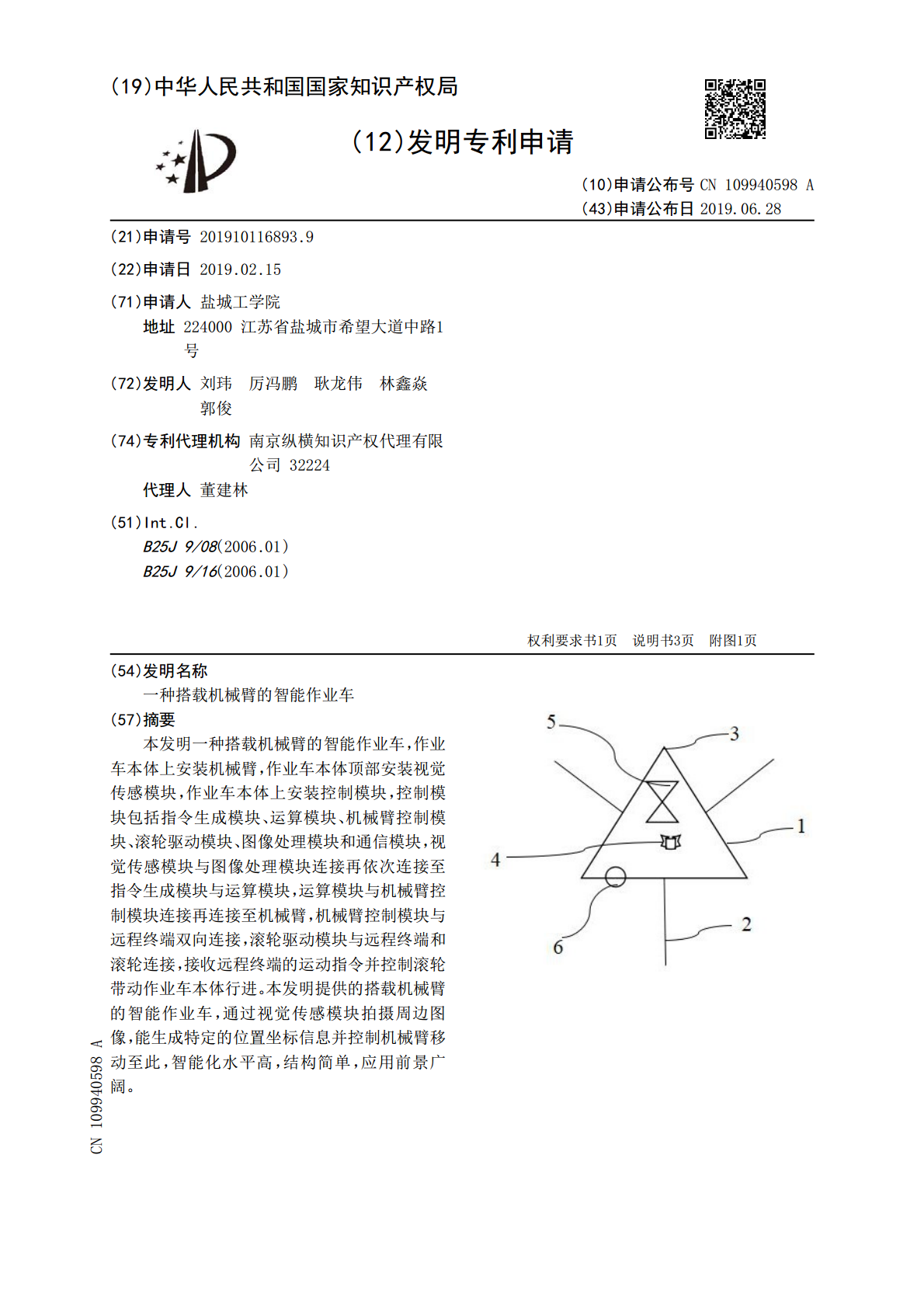
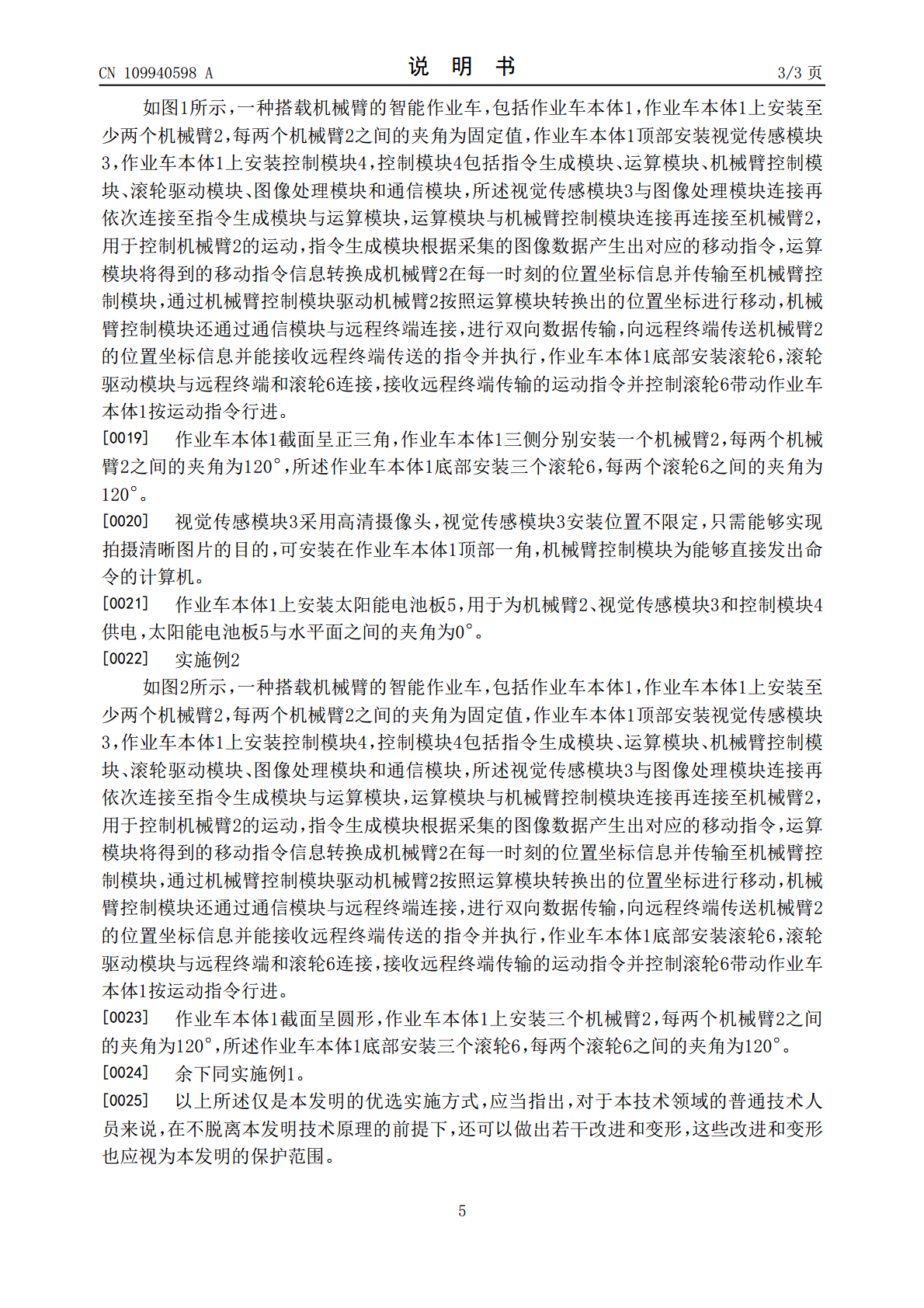
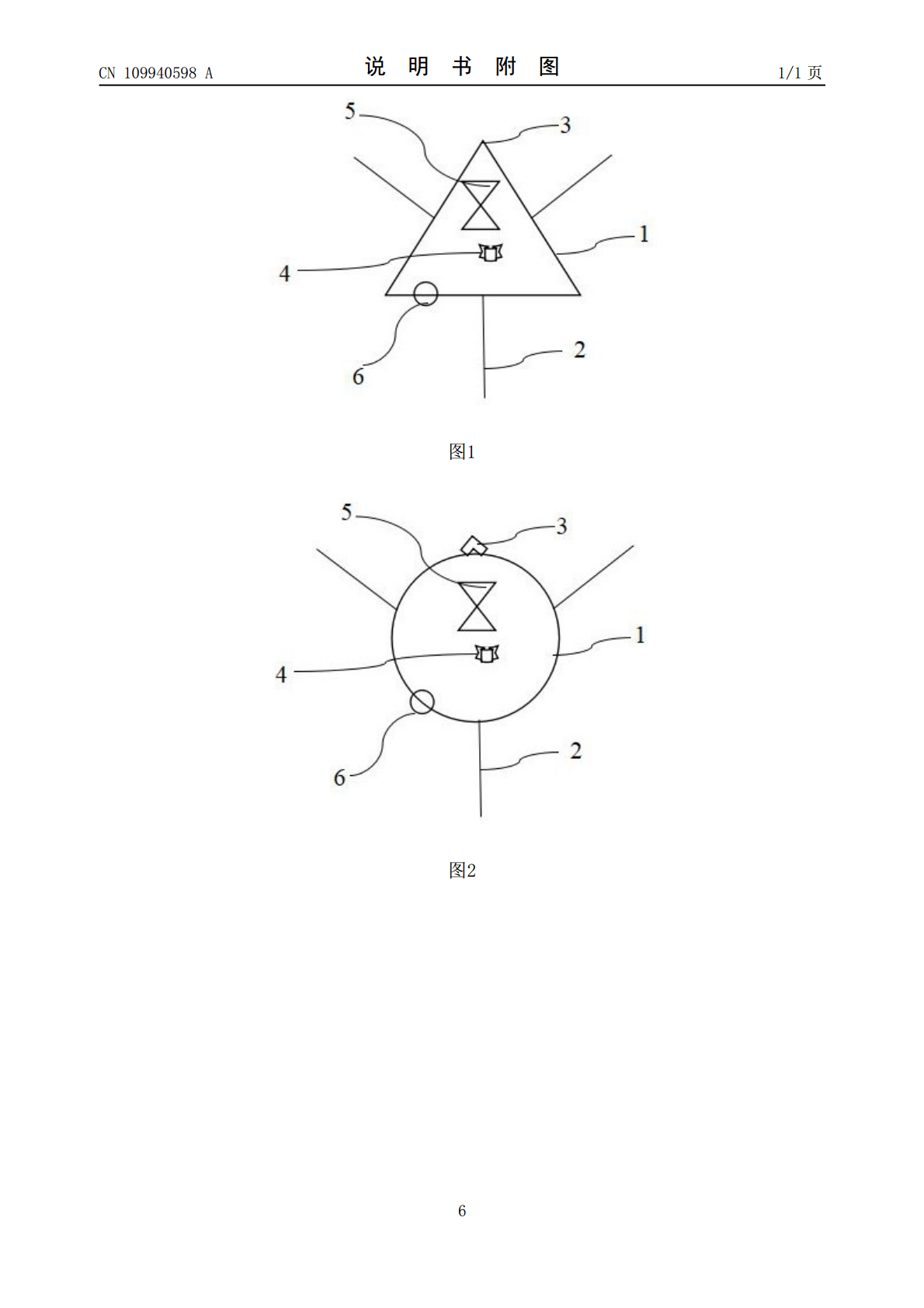
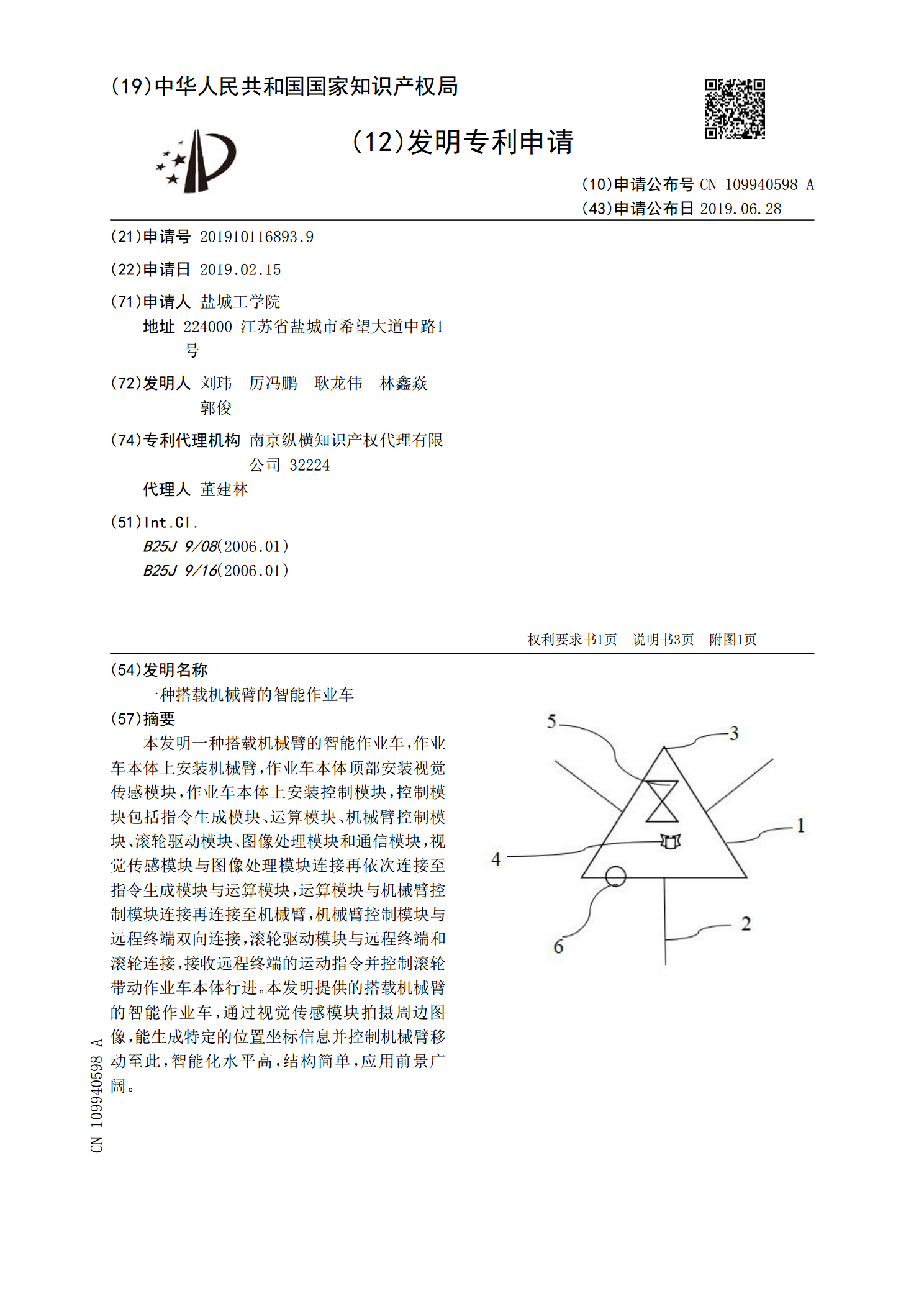
本发明一种搭载机械臂的智能作业车,作业车本体上安装机械臂,作业车本体顶部安装视觉传感模块,作业车本体上安装控制模块,控制模块包括指令生成模块、运算模块、机械臂控制模块、滚轮驱动模块、图像处理模块和通信模块,视觉传感模块与图像处理模块连接再依次连接至指令生成模块与运算模块,运算模块与机械臂控制模块连接再连接至机械臂,机械臂控制模块与远程终端双向连接,滚轮驱动模块与远程终端和滚轮连接,接收远程终端的运动指令并控制滚轮带动作业车本体行进。本发明提供的搭载机械臂的智能作业车,通过视觉传感模块拍摄周边图像,能生成特
一种搭载机械臂的智能车抓取机构.pdf
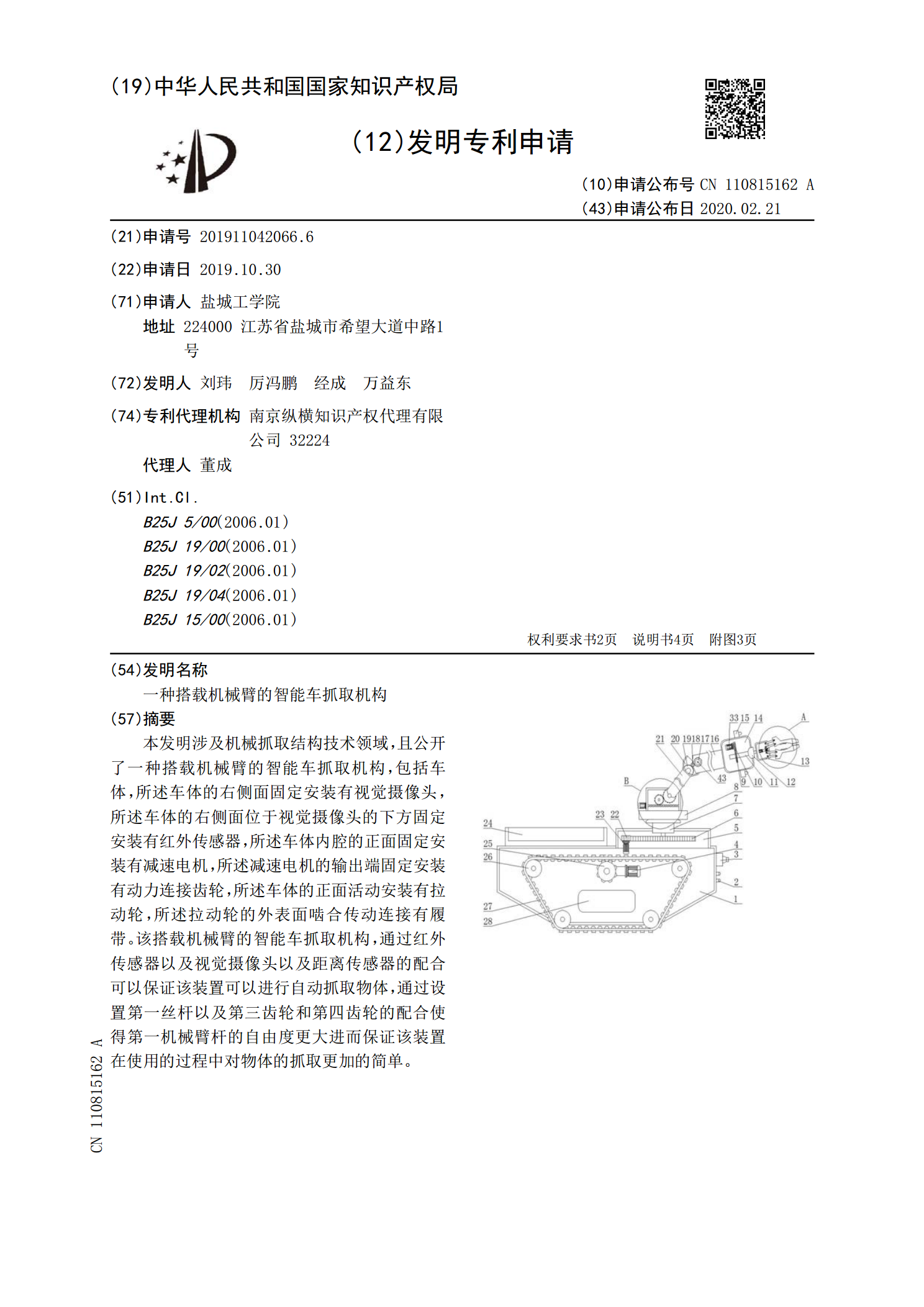
本发明涉及机械抓取结构技术领域,且公开了一种搭载机械臂的智能车抓取机构,包括车体,所述车体的右侧面固定安装有视觉摄像头,所述车体的右侧面位于视觉摄像头的下方固定安装有红外传感器,所述车体内腔的正面固定安装有减速电机,所述减速电机的输出端固定安装有动力连接齿轮,所述车体的正面活动安装有拉动轮,所述拉动轮的外表面啮合传动连接有履带。该搭载机械臂的智能车抓取机构,通过红外传感器以及视觉摄像头以及距离传感器的配合可以保证该装置可以进行自动抓取物体,通过设置第一丝杆以及第三齿轮和第四齿轮的配合使得第一机械臂杆的自由
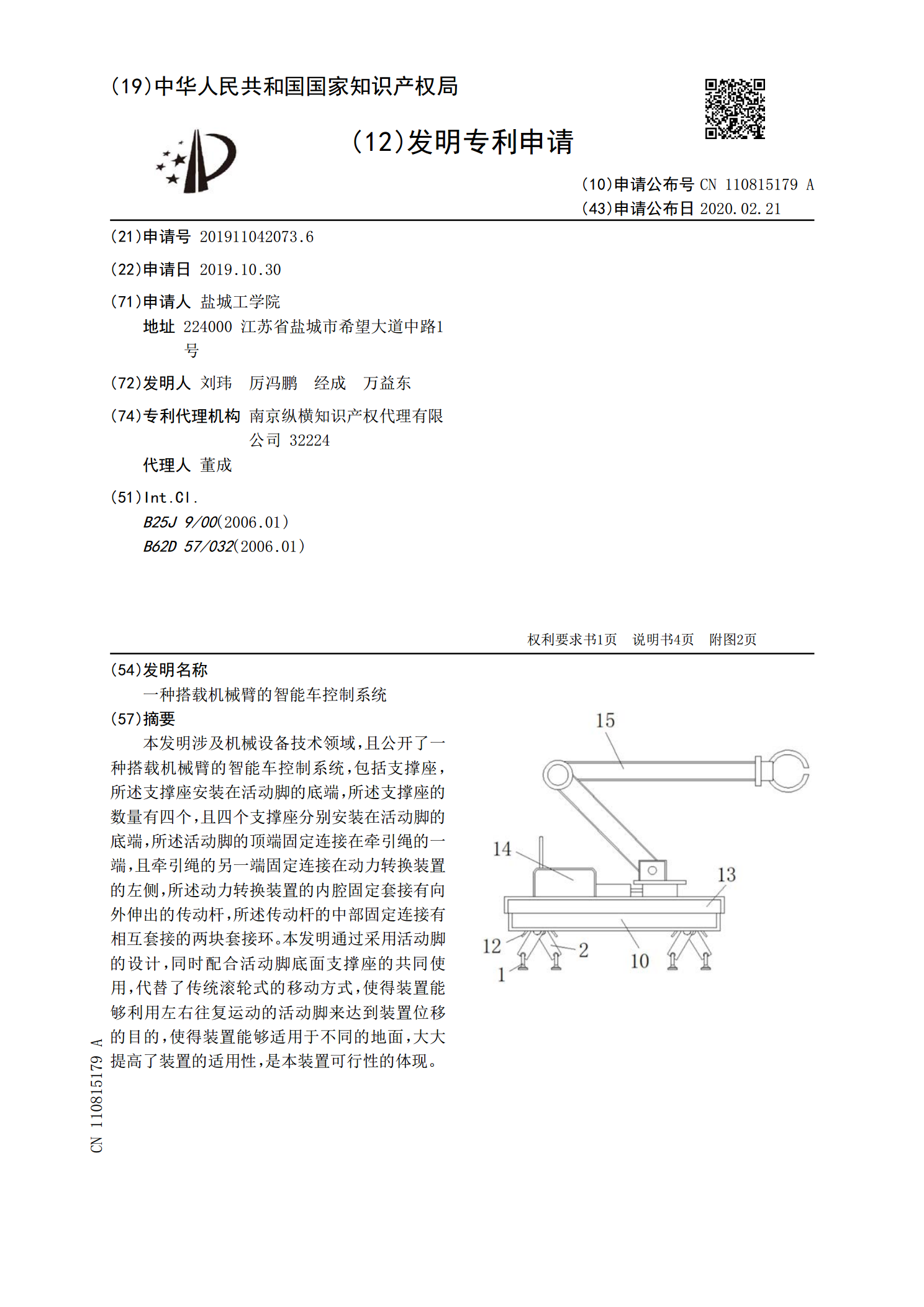
一种搭载机械臂的智能车控制系统.pdf
本发明涉及机械设备技术领域,且公开了一种搭载机械臂的智能车控制系统,包括支撑座,所述支撑座安装在活动脚的底端,所述支撑座的数量有四个,且四个支撑座分别安装在活动脚的底端,所述活动脚的顶端固定连接在牵引绳的一端,且牵引绳的另一端固定连接在动力转换装置的左侧,所述动力转换装置的内腔固定套接有向外伸出的传动杆,所述传动杆的中部固定连接有相互套接的两块套接环。本发明通过采用活动脚的设计,同时配合活动脚底面支撑座的共同使用,代替了传统滚轮式的移动方式,使得装置能够利用左右往复运动的活动脚来达到装置位移的目的,使得装

车用智能识别装卸机械臂.pdf
本发明公开了一种车用智能识别装卸机械臂,其包括吸盘、识别摄像头、缓冲弹簧、吸盘架、第一减速机、第一电机、滑槽、第一齿条、第一齿轮、第二电机、第二减速机、伸缩杆、第一旋转轴、第三减速机、第三电机、横托板、摄像头、X轴行走机构、Y轴行走机构、传感器、第三旋转轴,吸盘安装在缓冲弹簧上,缓冲弹簧安装在吸盘架上,吸盘架中设有识别摄像头和传感器,吸盘架安装在第三旋转轴上且第一减速机与第三旋转轴相连,第一电机与第一减速机相连,滑槽安装在第一减速机与第一电机之间且滑槽与伸缩杆底部相连。本发明解决了货物自动投放接收的问题,
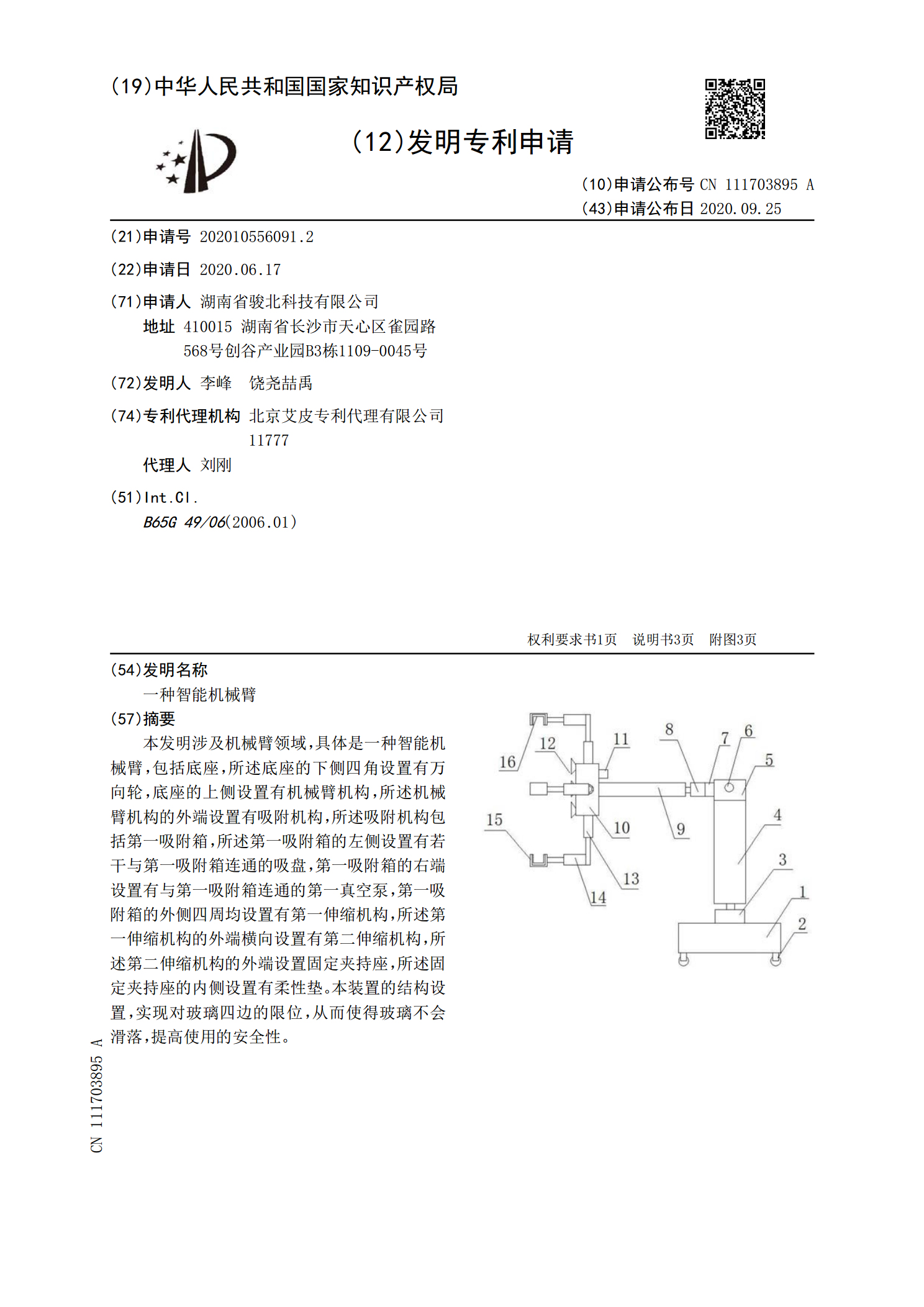
一种智能机械臂.pdf
本发明涉及机械臂领域,具体是一种智能机械臂,包括底座,所述底座的下侧四角设置有万向轮,底座的上侧设置有机械臂机构,所述机械臂机构的外端设置有吸附机构,所述吸附机构包括第一吸附箱,所述第一吸附箱的左侧设置有若干与第一吸附箱连通的吸盘,第一吸附箱的右端设置有与第一吸附箱连通的第一真空泵,第一吸附箱的外侧四周均设置有第一伸缩机构,所述第一伸缩机构的外端横向设置有第二伸缩机构,所述第二伸缩机构的外端设置固定夹持座,所述固定夹持座的内侧设置有柔性垫。本装置的结构设置,实现对玻璃四边的限位,从而使得玻璃不会滑落,提高