
用于施加车辆的滑行再生扭矩的系统和方法.pdf

景山****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于施加车辆的滑行再生扭矩的系统和方法.pdf
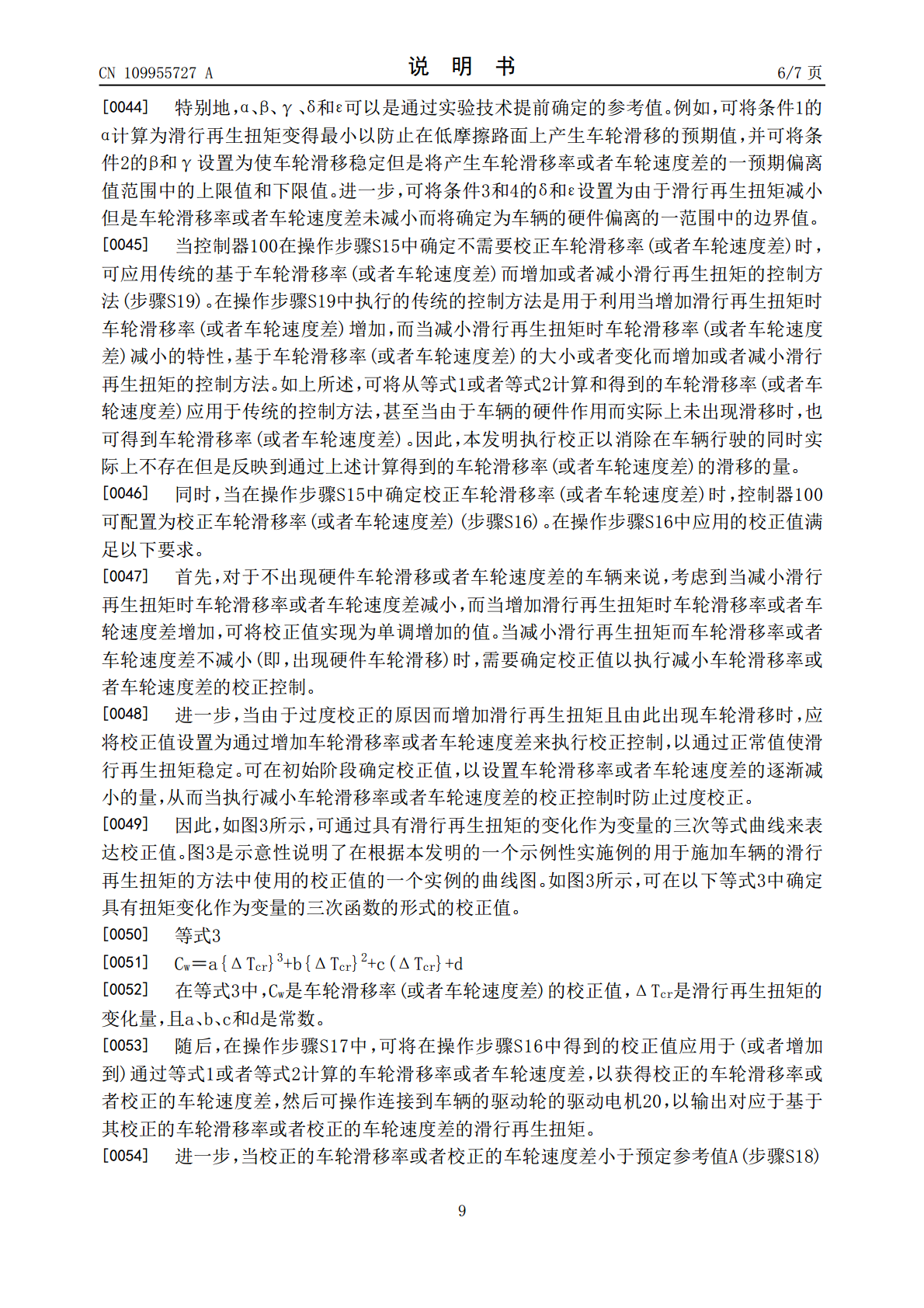
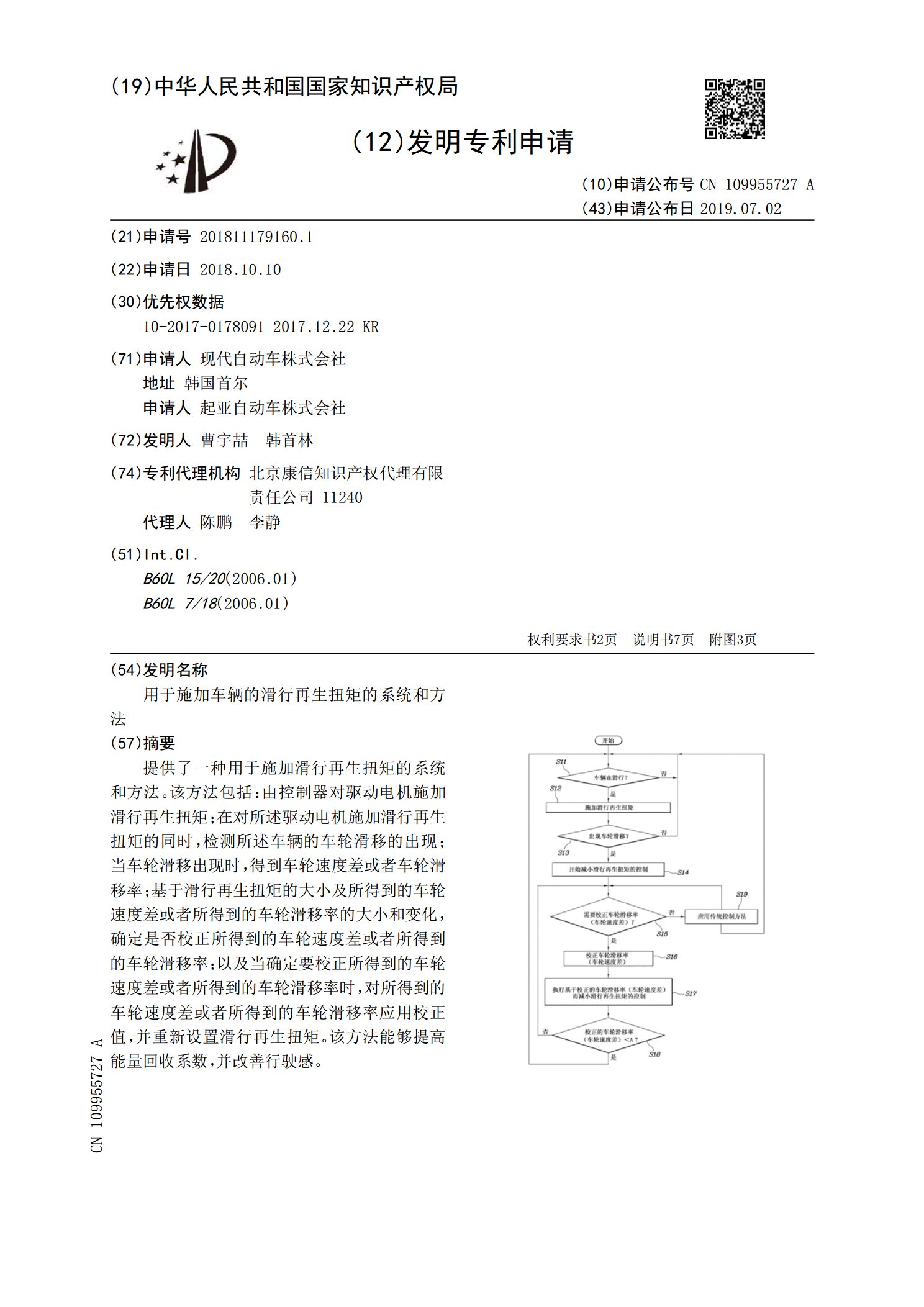
提供了一种用于施加滑行再生扭矩的系统和方法。该方法包括:由控制器对驱动电机施加滑行再生扭矩;在对所述驱动电机施加滑行再生扭矩的同时,检测所述车辆的车轮滑移的出现;当车轮滑移出现时,得到车轮速度差或者车轮滑移率;基于滑行再生扭矩的大小及所得到的车轮速度差或者所得到的车轮滑移率的大小和变化,确定是否校正所得到的车轮速度差或者所得到的车轮滑移率;以及当确定要校正所得到的车轮速度差或者所得到的车轮滑移率时,对所得到的车轮速度差或者所得到的车轮滑移率应用校正值,并重新设置滑行再生扭矩。该方法能够提高能量回收系数,并

用于控制车辆的再生制动扭矩的方法和系统.pdf
一种用于控制车辆(100)的再生制动扭矩的方法(300),车辆(100)包括至少一个第一车轴和至少一个第二车轴,其中,在至少一个第一车轴上安装有车辆(100)的至少一个第一移动构件(R1),在至少一个第二车轴上安装有车辆(100)的至少一个第二移动构件(R2);车辆(100)还包括制动系统(200),制动系统(200)包括与所述至少一个第一车轴工作上相关联的第一组部件(201)和与所述至少一个第二车轴工作上相关联的第二组部件(201);车辆(100)包括至少一个牵引和再生制动供应模块(203),其被配置成
车辆的滑行再生控制方法和装置.pdf
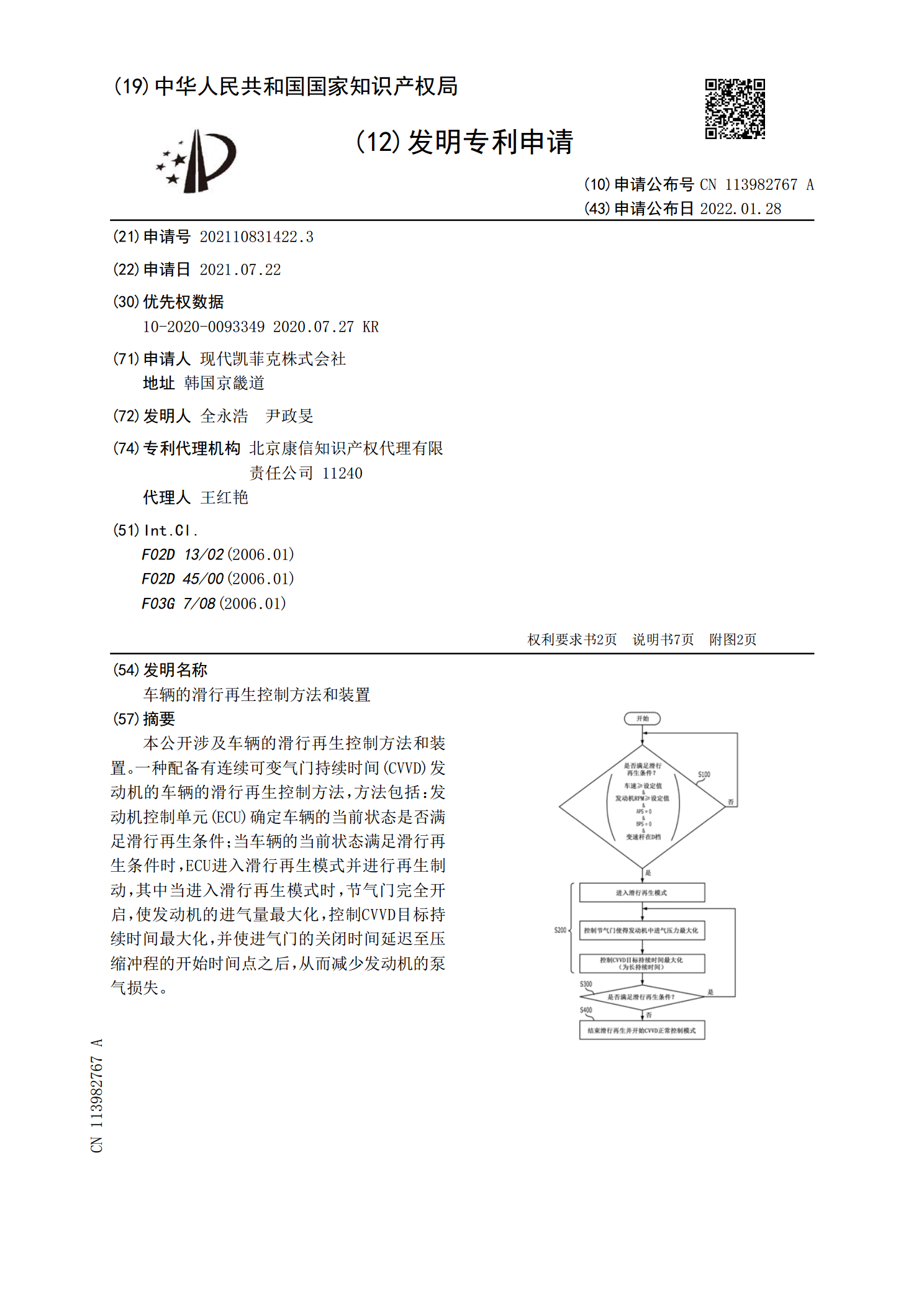
本公开涉及车辆的滑行再生控制方法和装置。一种配备有连续可变气门持续时间(CVVD)发动机的车辆的滑行再生控制方法,方法包括:发动机控制单元(ECU)确定车辆的当前状态是否满足滑行再生条件;当车辆的当前状态满足滑行再生条件时,ECU进入滑行再生模式并进行再生制动,其中当进入滑行再生模式时,节气门完全开启,使发动机的进气量最大化,控制CVVD目标持续时间最大化,并使进气门的关闭时间延迟至压缩冲程的开始时间点之后,从而减少发动机的泵气损失。
用于车辆的再生制动系统和用于运行车辆的再生制动系统的方法.pdf
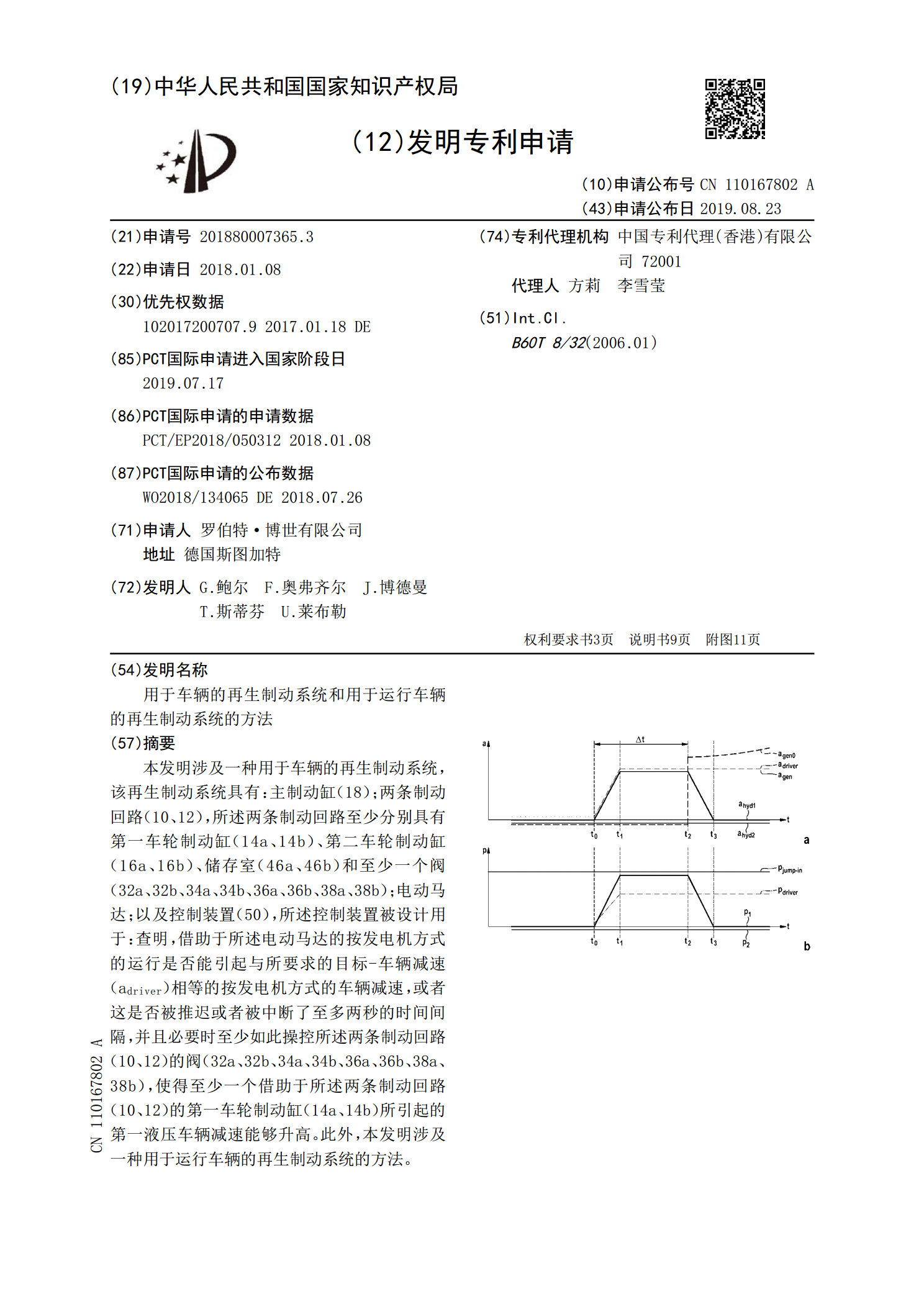
本发明涉及一种用于车辆的再生制动系统,该再生制动系统具有:主制动缸(18);两条制动回路(10、12),所述两条制动回路至少分别具有第一车轮制动缸(14a、14b)、第二车轮制动缸(16a、16b)、储存室(46a、46b)和至少一个阀(32a、32b、34a、34b、36a、36b、38a、38b);电动马达;以及控制装置(50),所述控制装置被设计用于:查明,借助于所述电动马达的按发电机方式的运行是否能引起与所要求的目标‑车辆减速(a

用于管理由车辆车轮上的电机所施加扭矩的系统.pdf
本发明主旨是用于管理车辆上与电机(14)联结的车轮上的扭矩的系统,所述电机设计为根据以驾驶员命令为基础应用的设定点以牵引或制动模式驱动。所述系统包括两个控制踏板(32、33),一个用于加速而另一个用于电力制动,所述踏板可由驾驶员在给定控制范围内致动。用于根据驾驶员所施加的加压测量每一踏板位移的传感器(54)设计为产生信号(42、43),所述信号在给定区间的变化通常提供所述控制范围内踏板位移测量值。如果所述测量信号数值偏离高于或低于所述给定变化区间,则由提供异常指示的故障检测器(108)拾取。以数字模式工作