
一种基于磁导航的四驱AGV姿态调整运动模型.pdf

Jo****63

1/10
2/10
3/10
4/10
5/10
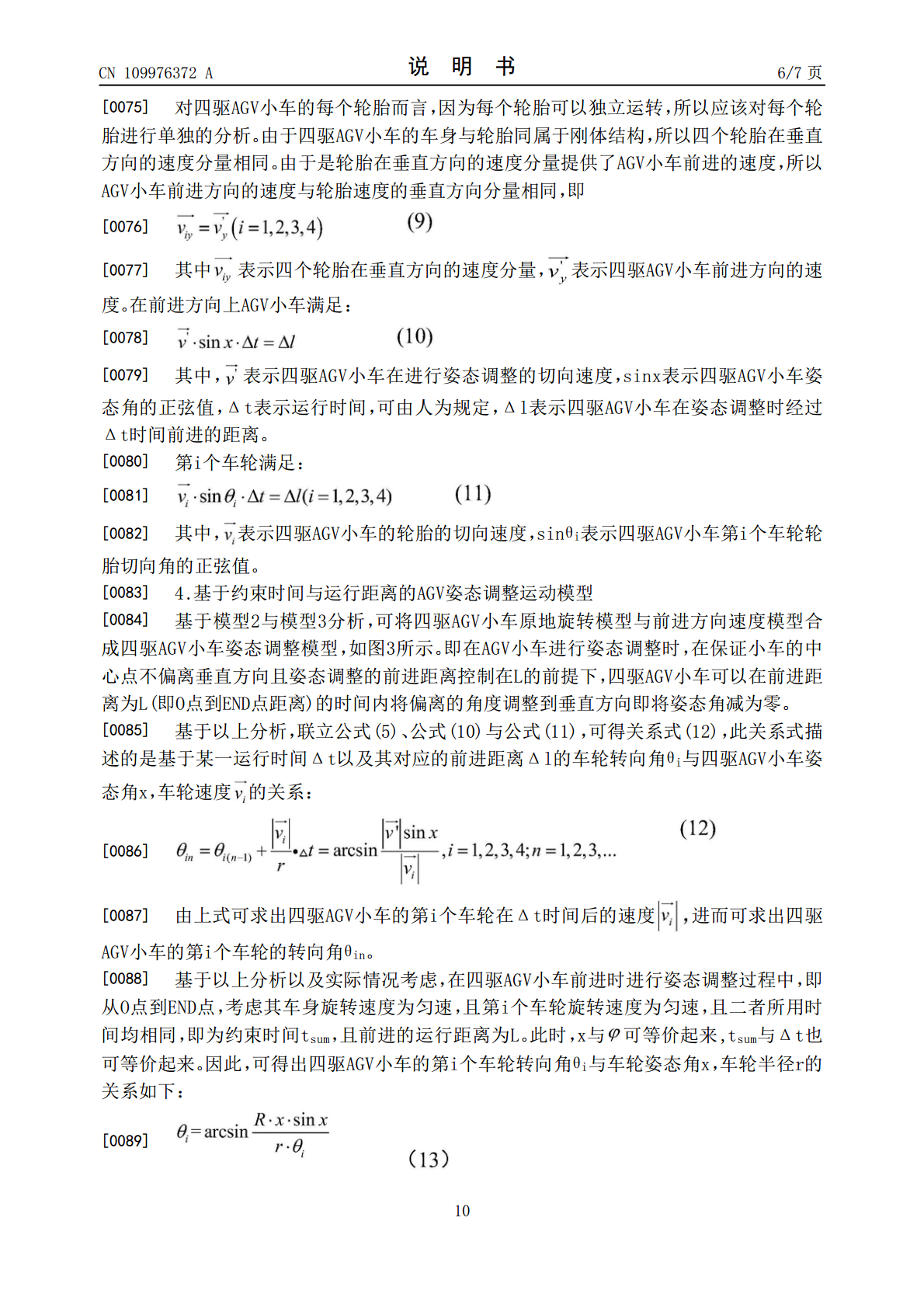
6/10
7/10
8/10
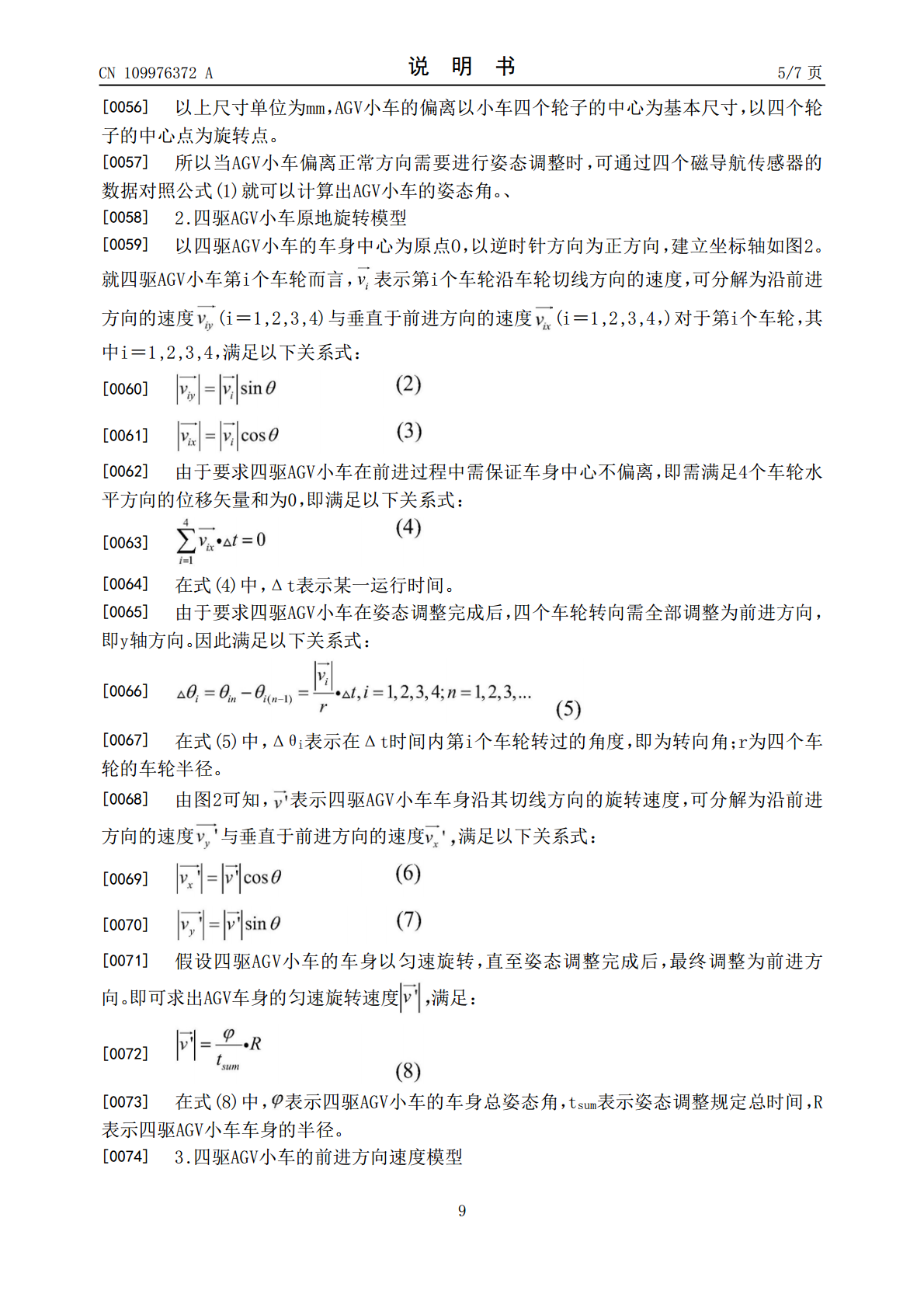
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于磁导航的四驱AGV姿态调整运动模型.pdf
本发明属于新能源汽车姿态控制领域,涉及一种基于磁导航的四驱AGV姿态调整运动模型,该基于磁导航的四驱AGV姿态调整运动模型包括以下步骤:通过磁导航传感器推导四驱AGV小车的姿态角;通过四驱AGV小车的四个轮胎能在相同时间在原地完成姿态调整得到四驱AGV小车原地旋转模型;通过四驱AGV小车的四个轮胎在前进方向速度相同得到四驱AGV小车前进方向速度模型;通过四驱AGV小车能在前进一定距离时完成姿态调整得到基于约束时间与运送距离的姿态运动合成模型;本发明提供了四驱AGV小车姿态调整的运动模型,可以实现对四驱AG
一种基于麦克纳姆轮的四驱AGV小车差速直线行驶姿态调整方法.pdf
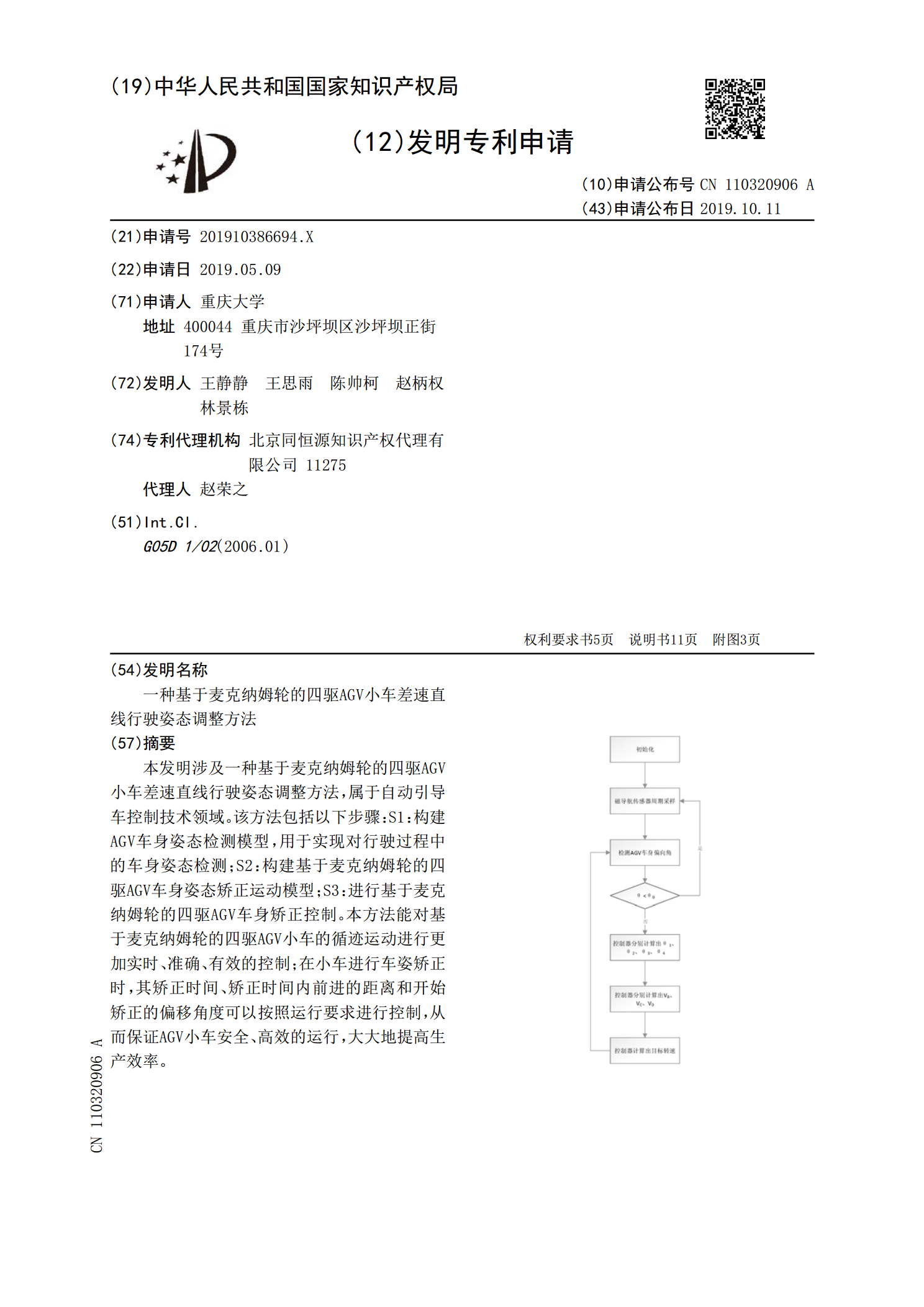
本发明涉及一种基于麦克纳姆轮的四驱AGV小车差速直线行驶姿态调整方法,属于自动引导车控制技术领域。该方法包括以下步骤:S1:构建AGV车身姿态检测模型,用于实现对行驶过程中的车身姿态检测;S2:构建基于麦克纳姆轮的四驱AGV车身姿态矫正运动模型;S3:进行基于麦克纳姆轮的四驱AGV车身矫正控制。本方法能对基于麦克纳姆轮的四驱AGV小车的循迹运动进行更加实时、准确、有效的控制;在小车进行车姿矫正时,其矫正时间、矫正时间内前进的距离和开始矫正的偏移角度可以按照运行要求进行控制,从而保证AGV小车安全、高效的运

一种AGV姿态调整方法及系统.pdf
本公开提供一种AGV姿态调整方法及系统,涉及导引运输车领域,获取载物架相对于水平面的倾角和其两侧支撑架的初始长度;获取利用支撑架调节载物架至水平后支撑架的长度;建立载物架倾角与调平载物架后支撑架长度变化量的对应关系,通过预先建立载物台倾角与调平支撑架长度变化量的对应关系,在实际运行中,载物架产生倾斜时,能够快速得出支撑架所需变化的长度,配置对应的调整模块进行调整,达到快速恢复载物架水平状态的目的。
一种桶仓储搬运磁导航AGV.pdf
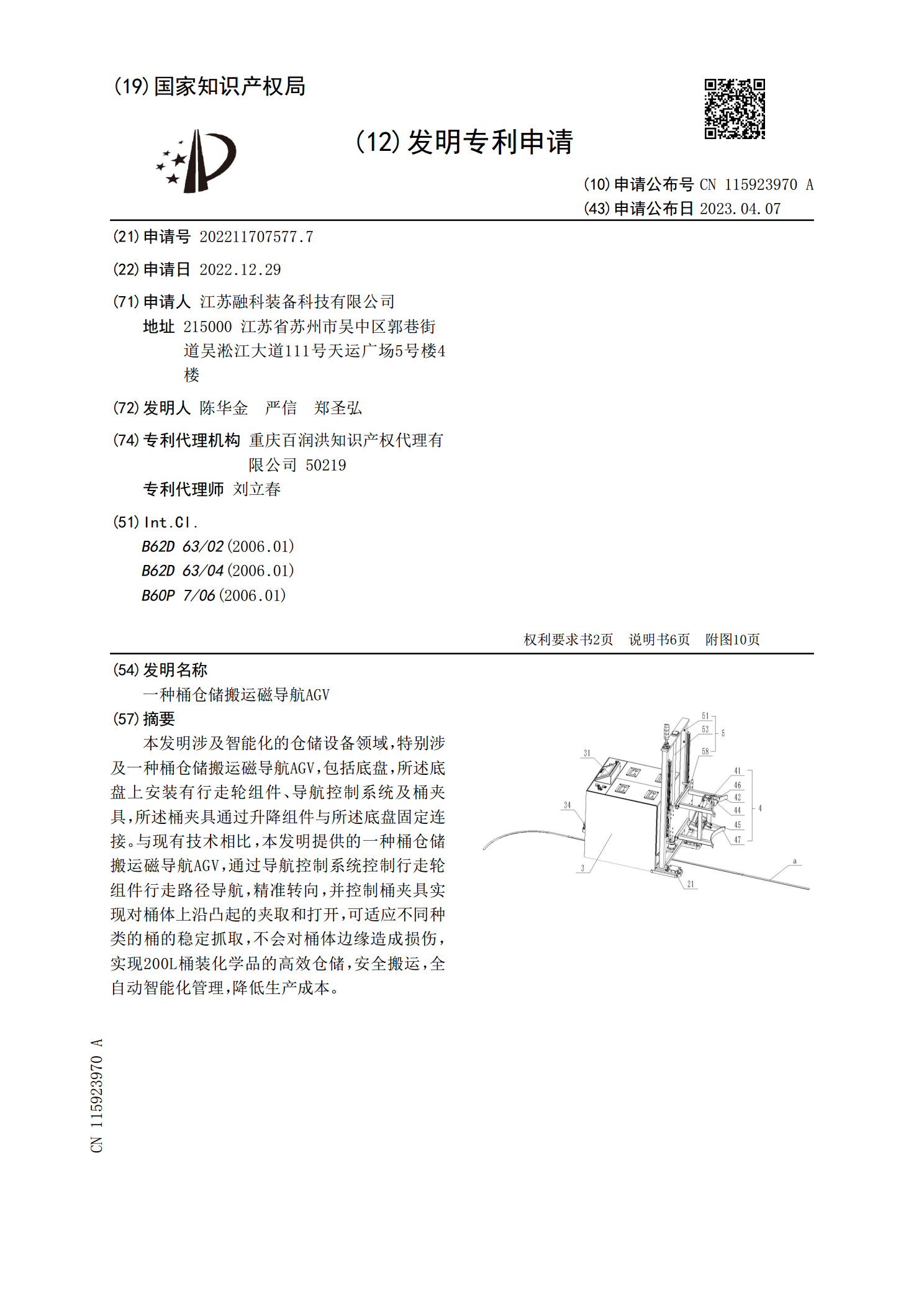
本发明涉及智能化的仓储设备领域,特别涉及一种桶仓储搬运磁导航AGV,包括底盘,所述底盘上安装有行走轮组件、导航控制系统及桶夹具,所述桶夹具通过升降组件与所述底盘固定连接。与现有技术相比,本发明提供的一种桶仓储搬运磁导航AGV,通过导航控制系统控制行走轮组件行走路径导航,精准转向,并控制桶夹具实现对桶体上沿凸起的夹取和打开,可适应不同种类的桶的稳定抓取,不会对桶体边缘造成损伤,实现200L桶装化学品的高效仓储,安全搬运,全自动智能化管理,降低生产成本。

一种适合AGV的磁导航系统和导航方法.pdf
本发明公开了一种适合AGV的磁导航系统和导航方法,所述系统包括传感器模块、磁传感器信号采集模块、巡线主板模块;磁传感器信号采集模块的传感器阵列呈三行五列的形式排列,磁传感器信号采集模块采集各传感器的TTL电平信号,编码成规定16进制协议形式,并转化为232电平信号传给巡线主板模块进行分析后得到AGV当前巡线状态,根据巡线状态进行AGV左右轮差速调整,同时将AGV巡线状态和路口检测结果报告给上位机。本发明导航速度高,摆动幅度较小,能较好的控制AGV的运行轨迹,并能应用于多种类型路口。