
一种适合AGV的磁导航系统和导航方法.pdf

是你****盟主


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种适合AGV的磁导航系统和导航方法.pdf
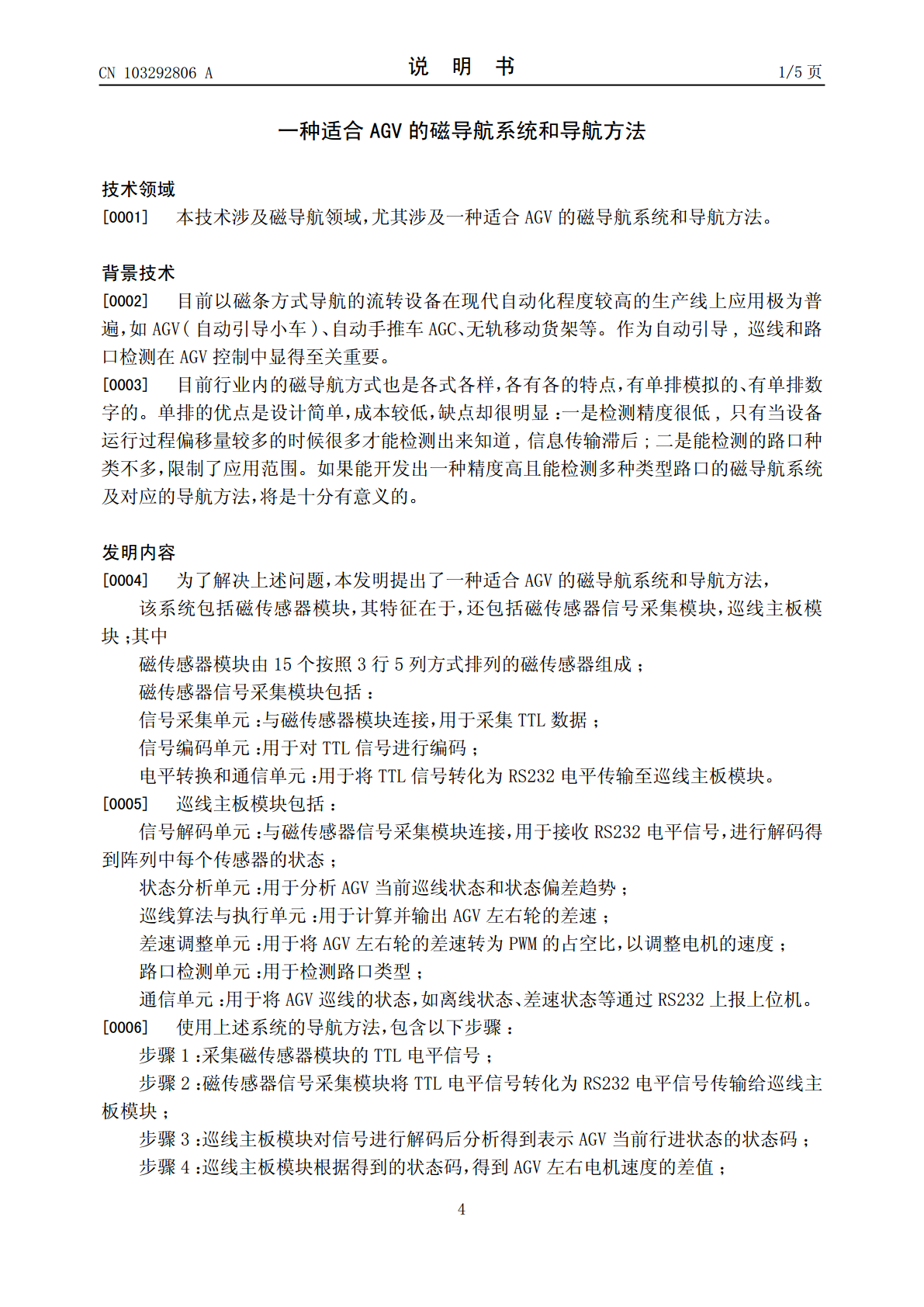
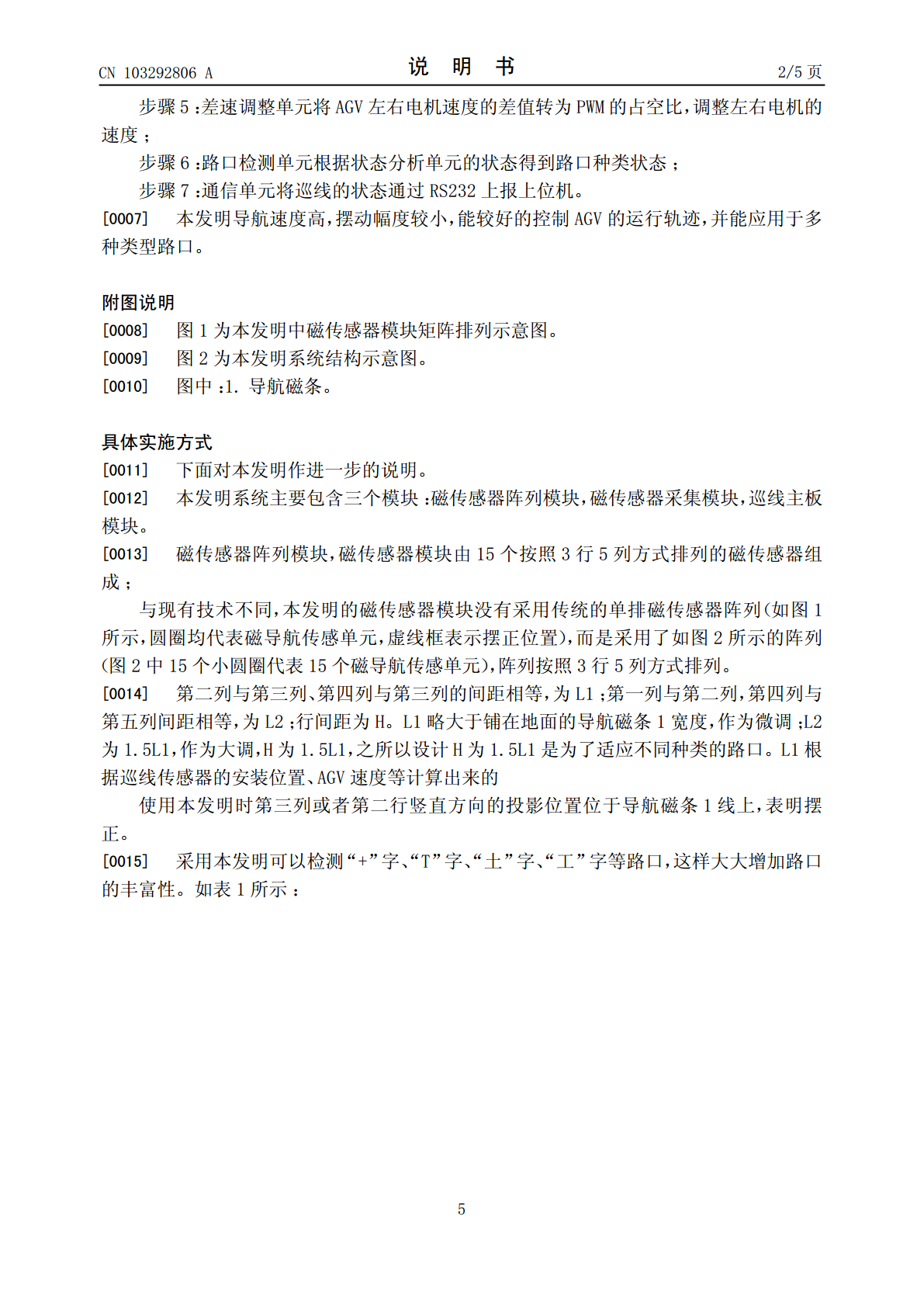
本发明公开了一种适合AGV的磁导航系统和导航方法,所述系统包括传感器模块、磁传感器信号采集模块、巡线主板模块;磁传感器信号采集模块的传感器阵列呈三行五列的形式排列,磁传感器信号采集模块采集各传感器的TTL电平信号,编码成规定16进制协议形式,并转化为232电平信号传给巡线主板模块进行分析后得到AGV当前巡线状态,根据巡线状态进行AGV左右轮差速调整,同时将AGV巡线状态和路口检测结果报告给上位机。本发明导航速度高,摆动幅度较小,能较好的控制AGV的运行轨迹,并能应用于多种类型路口。

一种适合仓储AGV的惯性导航系统.pdf
本发明公开了一种适合仓储AGV的惯性导航系统,它包括陀螺仪、磁钉、编码器、磁传感器、RFID卡、RFID读卡器、控制单元、左右驱动器和左右轮,磁钉和RFID卡设置在AGV航道上,陀螺仪、RFID读卡器和控制单元设置在AGV上,磁传感器设置在小车车头底部的中线上,左右驱动器和左右轮设置在小车底部,驱动器与车轮连接,陀螺仪、磁传感器、编码器、RFID读卡器和左右驱动器分别与控制单元连接。该系统采用磁钉代替磁条和二维码,有效地节约成本的同时能解决二维码受多尘环境影响较严重的缺陷,实现无轨导航方式,该系统测量位置

磁导航AGV的路径跟踪方法.pdf
本发明公开了一种磁导航AGV的路径跟踪方法。该路径跟踪方法包括:步骤1,判断横向检测传感器中间两个点以及纵向传感器的所有点是否有信号输出;步骤2,基于步骤1,若是直接跳入到步骤7;步骤3,基于步骤2,若否,则判断横向传感器的哪几位有信号输出;步骤4,基于步骤3,同时判断纵向信号输出点是否有第一个点,若是直接跳入到步骤7;步骤5;步骤6,经计算出来的控制量输出给两个控制电机执行纠偏过程,并判断是否进入到接近姿态;步骤7,若满足接近姿态的条件,则车体两个驱动轮的其中一个轮转速保持不变且另一个轮以原来的转速反转
磁导航系统.pdf
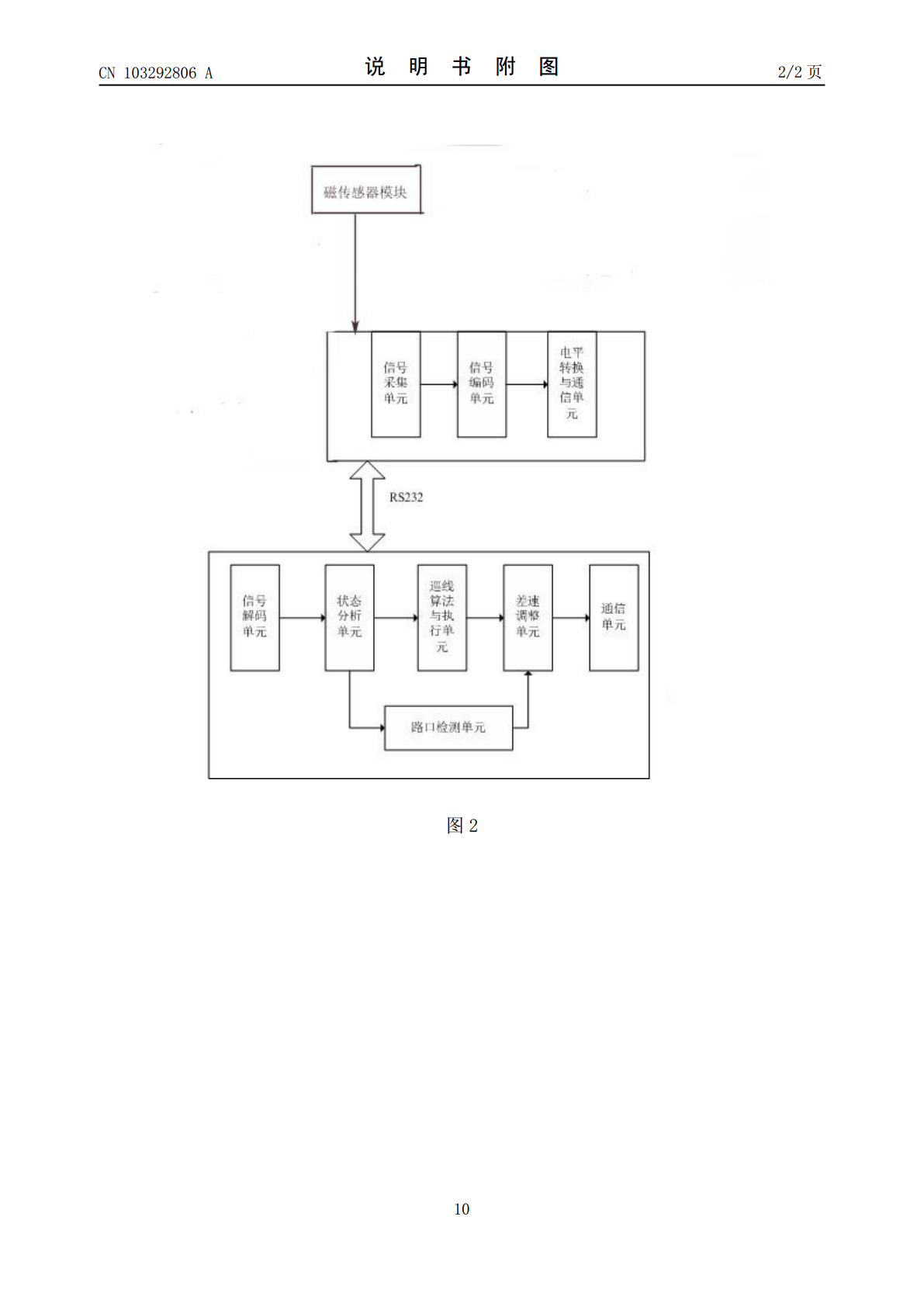
本发明提出了一种磁导航系统,磁导航系统包括磁场发生器和控制系统,磁场发生器包括多个电磁单元,多个电磁单元产生的磁场可以形成工作磁场,通过控制系统可以对电磁单元的工作状态进行调整,从而可以调整工作磁场的不同工作参数,使磁导航仪可以根据工作需要对工作磁场进行便捷、高效地调节,运行噪声低。而且,磁场发生器采用多个电磁单元克服了相关技术中采用永磁体体积大而重,不便于运输、安装、维护和修理的缺陷,降低了占地面积和对地面结构强度的要求。另外,当磁导航系统处于非工作状态时,可以通过控制系统关闭电磁单元消除工作磁场,由此
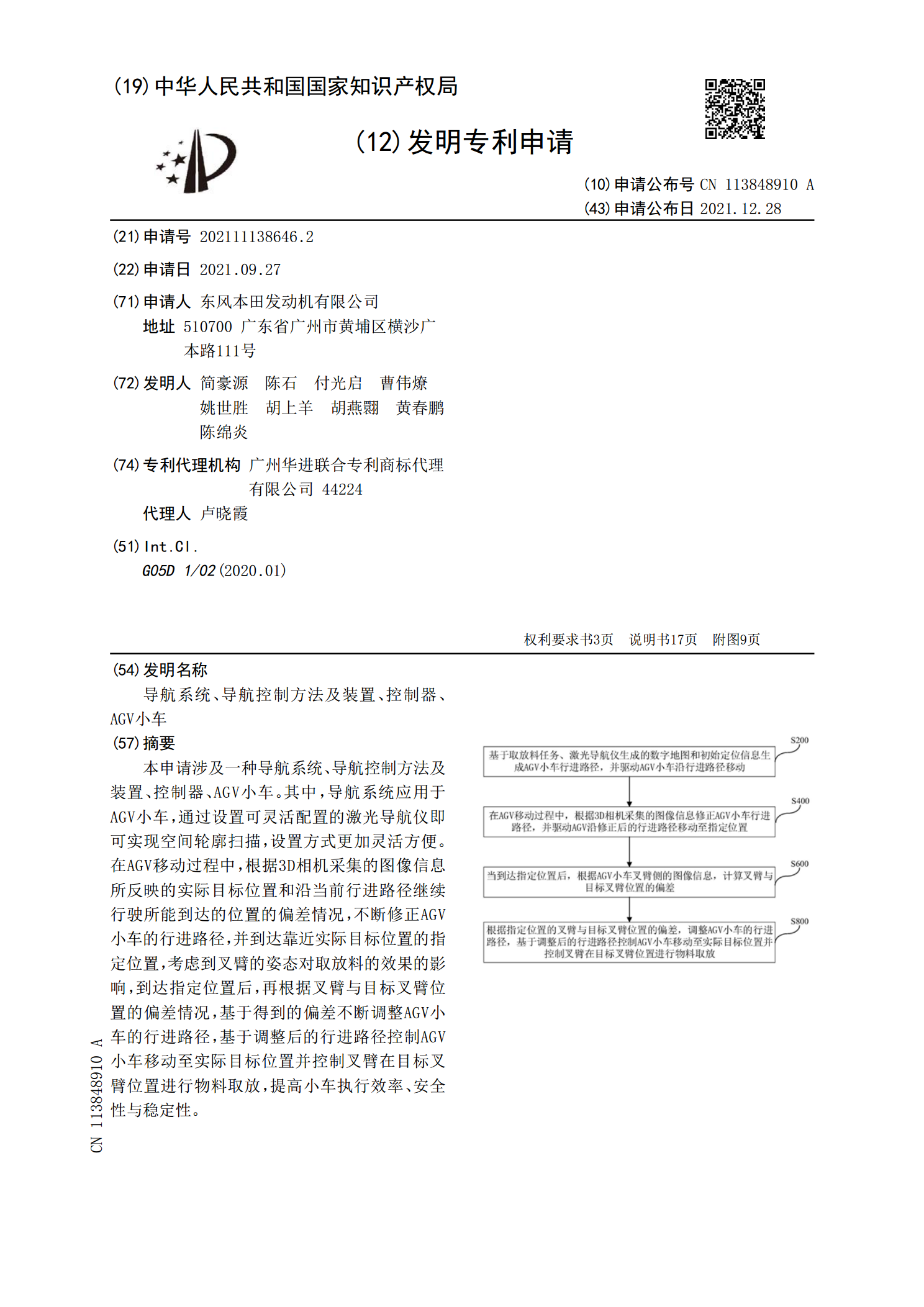
导航系统、导航控制方法及装置、控制器、AGV小车.pdf
本申请涉及一种导航系统、导航控制方法及装置、控制器、AGV小车。其中,导航系统应用于AGV小车,通过设置可灵活配置的激光导航仪即可实现空间轮廓扫描,设置方式更加灵活方便。在AGV移动过程中,根据3D相机采集的图像信息所反映的实际目标位置和沿当前行进路径继续行驶所能到达的位置的偏差情况,不断修正AGV小车的行进路径,并到达靠近实际目标位置的指定位置,考虑到叉臂的姿态对取放料的效果的影响,到达指定位置后,再根据叉臂与目标叉臂位置的偏差情况,基于得到的偏差不断调整AGV小车的行进路径,基于调整后的行进路径控制A