
一种AGV姿态调整方法及系统.pdf

努力****弘毅

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种AGV姿态调整方法及系统.pdf
本公开提供一种AGV姿态调整方法及系统,涉及导引运输车领域,获取载物架相对于水平面的倾角和其两侧支撑架的初始长度;获取利用支撑架调节载物架至水平后支撑架的长度;建立载物架倾角与调平载物架后支撑架长度变化量的对应关系,通过预先建立载物台倾角与调平支撑架长度变化量的对应关系,在实际运行中,载物架产生倾斜时,能够快速得出支撑架所需变化的长度,配置对应的调整模块进行调整,达到快速恢复载物架水平状态的目的。
一种智能停车系统的AGV姿态估算方法及系统.pdf
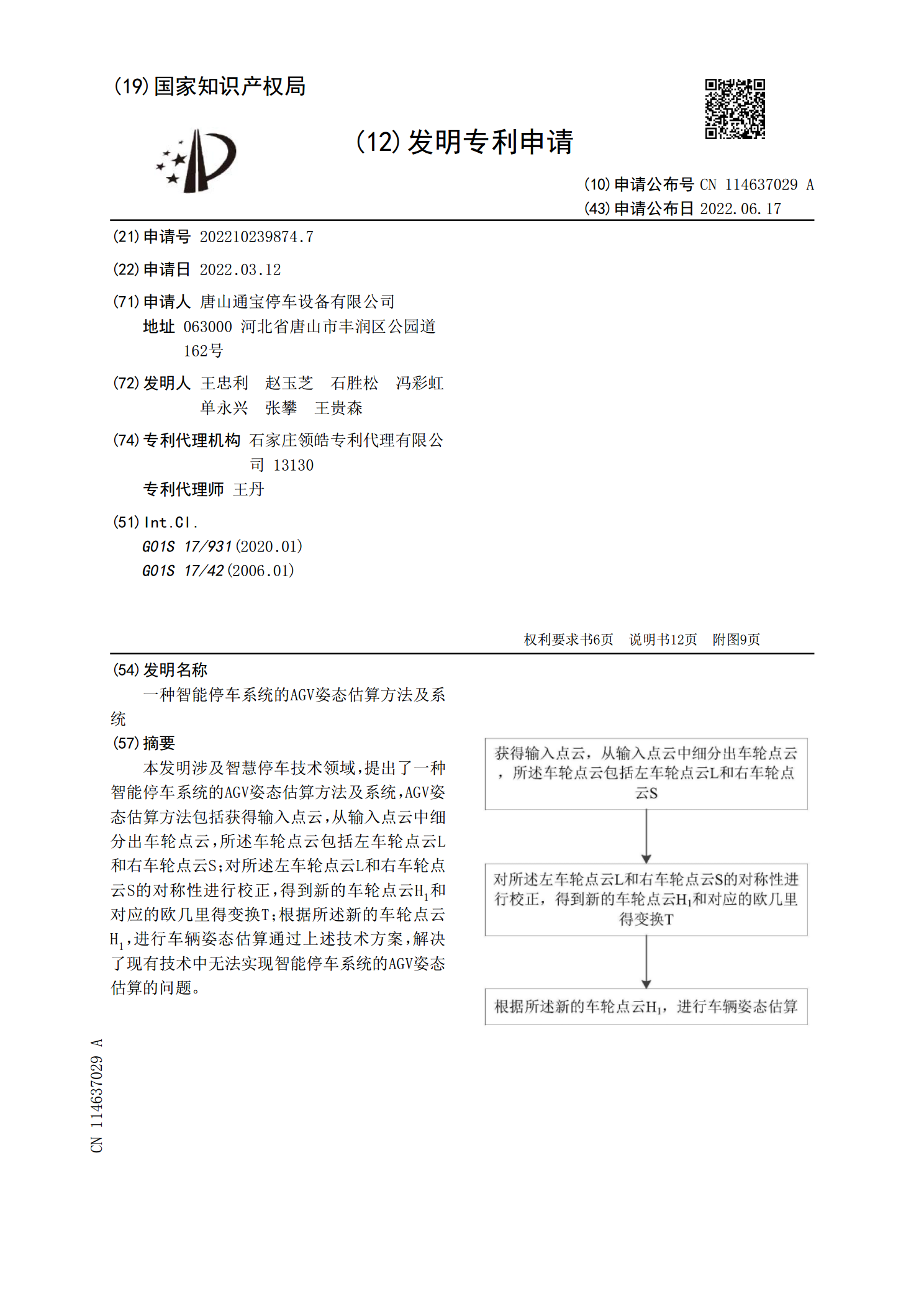
本发明涉及智慧停车技术领域,提出了一种智能停车系统的AGV姿态估算方法及系统,AGV姿态估算方法包括获得输入点云,从输入点云中细分出车轮点云,所述车轮点云包括左车轮点云L和右车轮点云S;对所述左车轮点云L和右车轮点云S的对称性进行校正,得到新的车轮点云H<base:Sub>1</base:Sub>和对应的欧几里得变换T;根据所述新的车轮点云H<base:Sub>1</base:Sub>,进行车辆姿态估算通过上述技术方案,解决了现有技术中无法实现智能停车系统的AGV姿态估算的问题。
桥梁姿态调整系统及方法.pdf
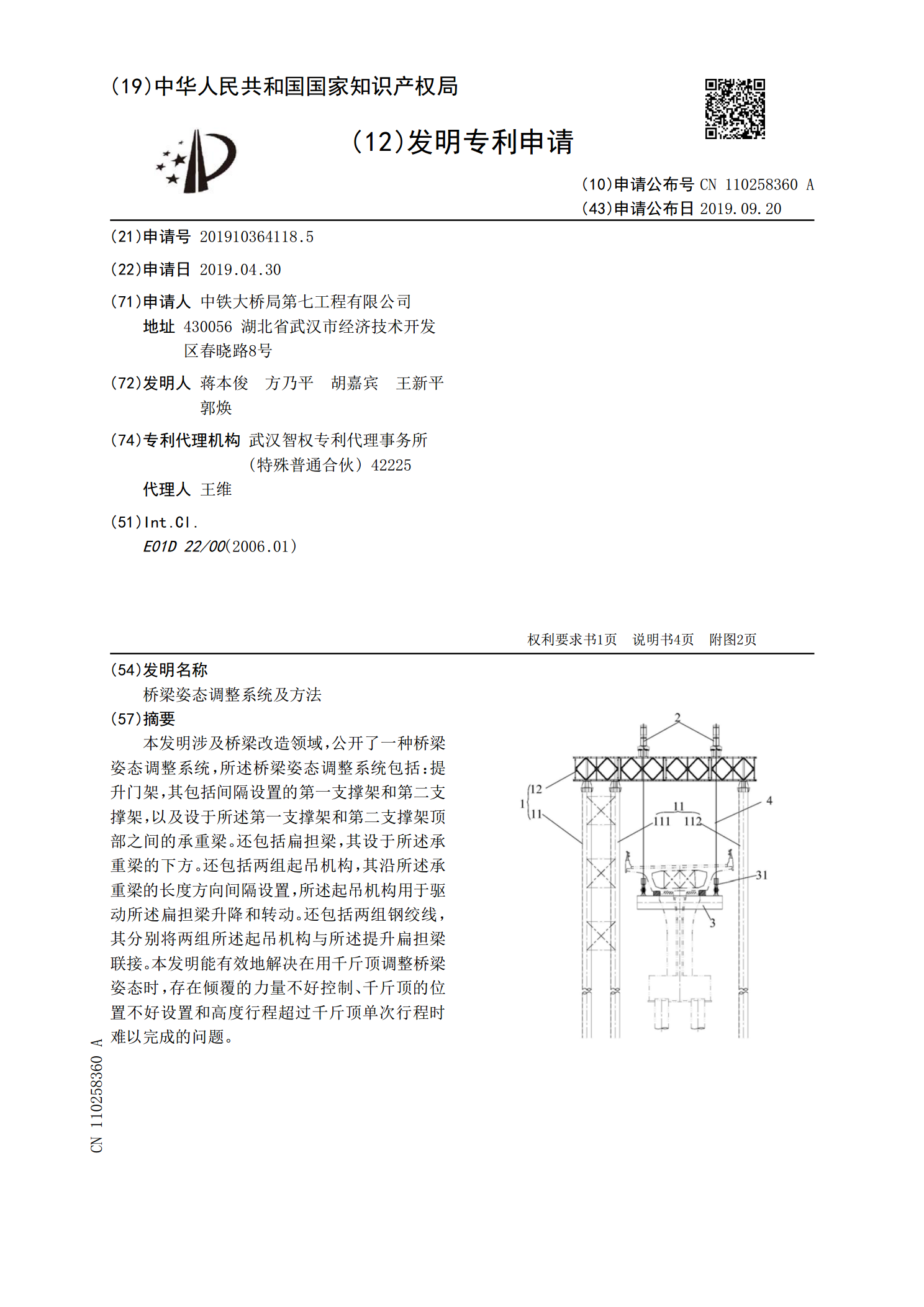
本发明涉及桥梁改造领域,公开了一种桥梁姿态调整系统,所述桥梁姿态调整系统包括:提升门架,其包括间隔设置的第一支撑架和第二支撑架,以及设于所述第一支撑架和第二支撑架顶部之间的承重梁。还包括扁担梁,其设于所述承重梁的下方。还包括两组起吊机构,其沿所述承重梁的长度方向间隔设置,所述起吊机构用于驱动所述扁担梁升降和转动。还包括两组钢绞线,其分别将两组所述起吊机构与所述提升扁担梁联接。本发明能有效地解决在用千斤顶调整桥梁姿态时,存在倾覆的力量不好控制、千斤顶的位置不好设置和高度行程超过千斤顶单次行程时难以完成的问题
一种汽车姿态调整系统.pdf
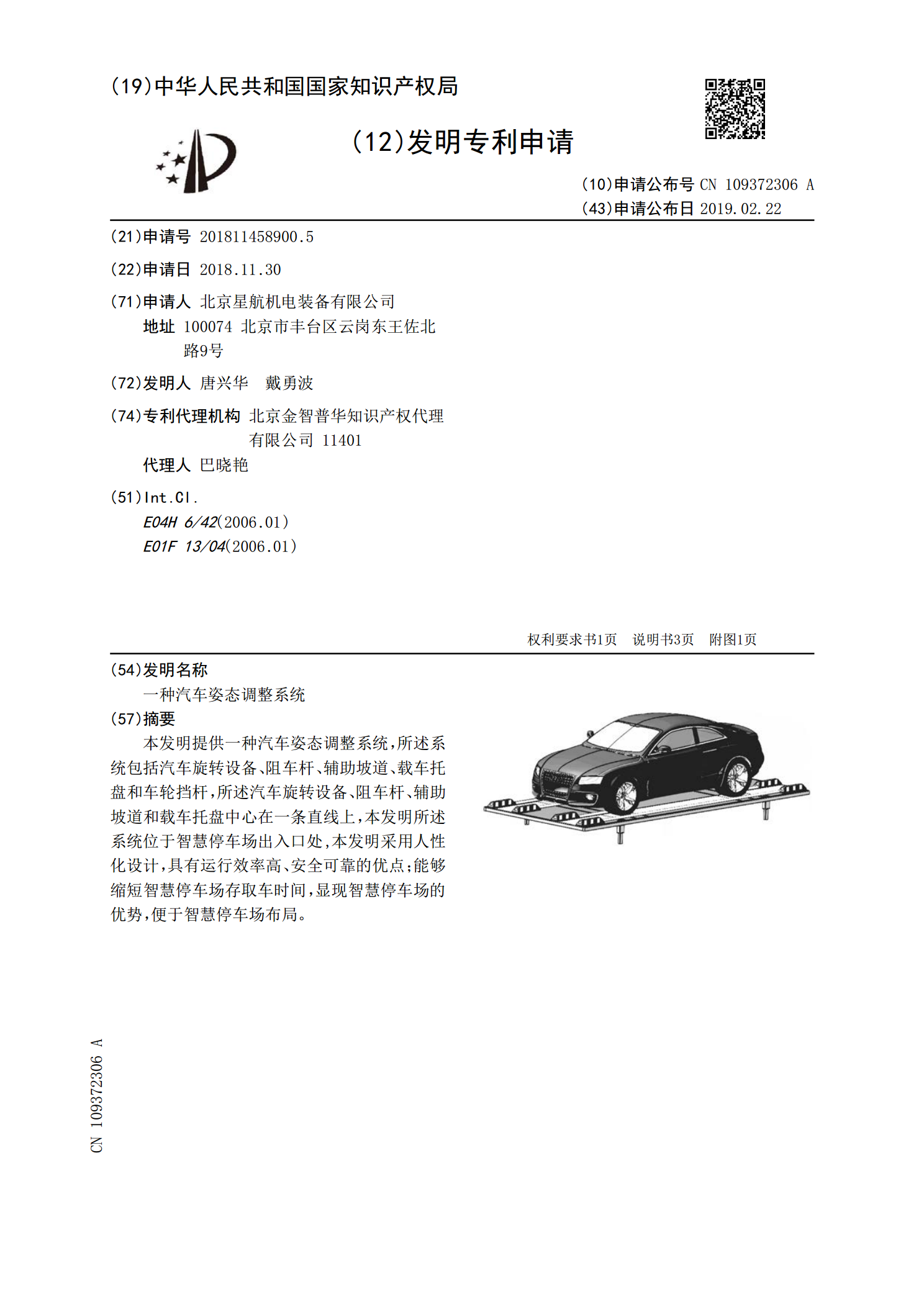
本发明提供一种汽车姿态调整系统,所述系统包括汽车旋转设备、阻车杆、辅助坡道、载车托盘和车轮挡杆,所述汽车旋转设备、阻车杆、辅助坡道和载车托盘中心在一条直线上,本发明所述系统位于智慧停车场出入口处,本发明采用人性化设计,具有运行效率高、安全可靠的优点;能够缩短智慧停车场存取车时间,显现智慧停车场的优势,便于智慧停车场布局。
一种基于磁导航的四驱AGV姿态调整运动模型.pdf
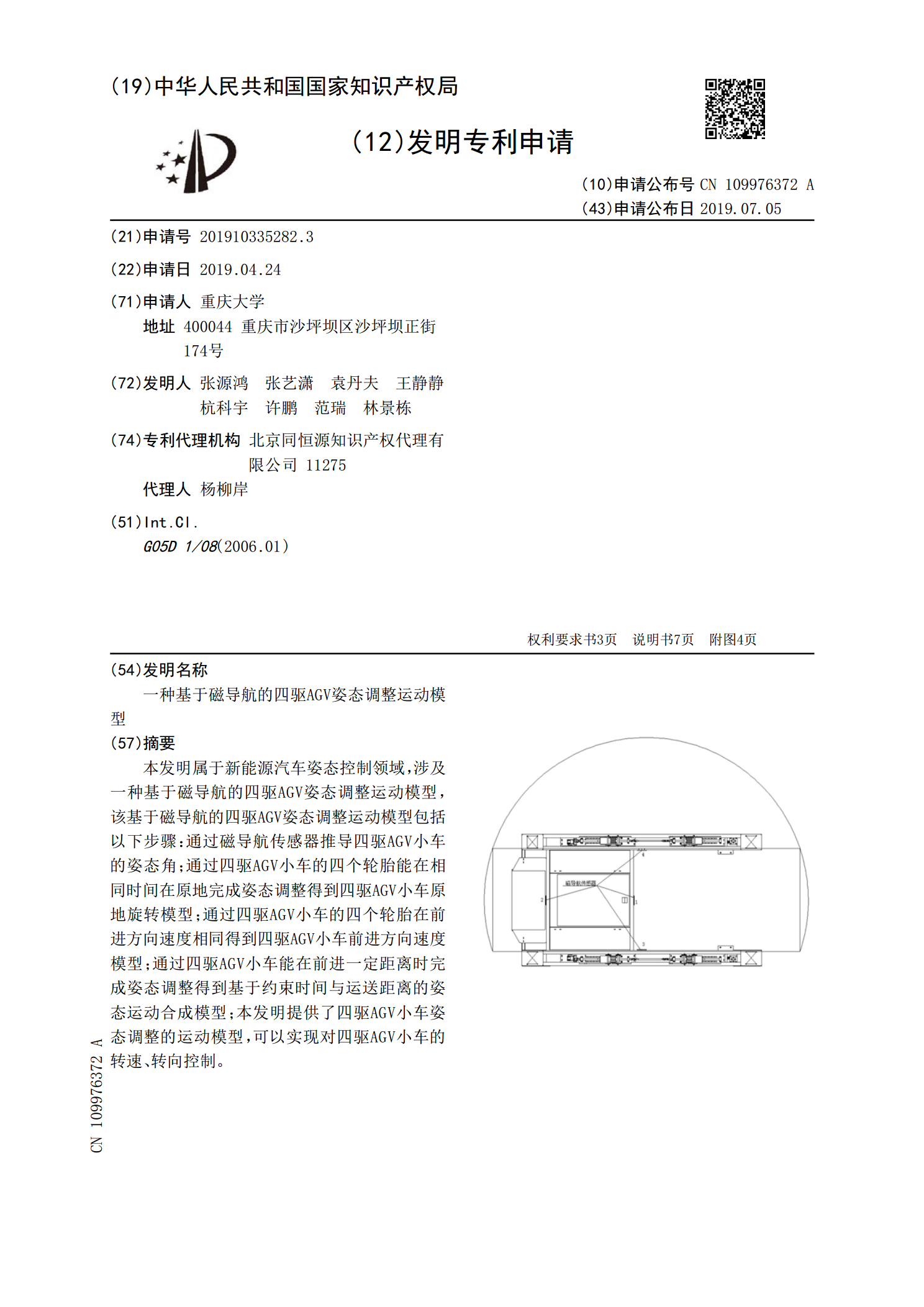
本发明属于新能源汽车姿态控制领域,涉及一种基于磁导航的四驱AGV姿态调整运动模型,该基于磁导航的四驱AGV姿态调整运动模型包括以下步骤:通过磁导航传感器推导四驱AGV小车的姿态角;通过四驱AGV小车的四个轮胎能在相同时间在原地完成姿态调整得到四驱AGV小车原地旋转模型;通过四驱AGV小车的四个轮胎在前进方向速度相同得到四驱AGV小车前进方向速度模型;通过四驱AGV小车能在前进一定距离时完成姿态调整得到基于约束时间与运送距离的姿态运动合成模型;本发明提供了四驱AGV小车姿态调整的运动模型,可以实现对四驱AG