
一种基于麦克纳姆轮的四驱AGV小车差速直线行驶姿态调整方法.pdf

鸿朗****ka

1/10
2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于麦克纳姆轮的四驱AGV小车差速直线行驶姿态调整方法.pdf
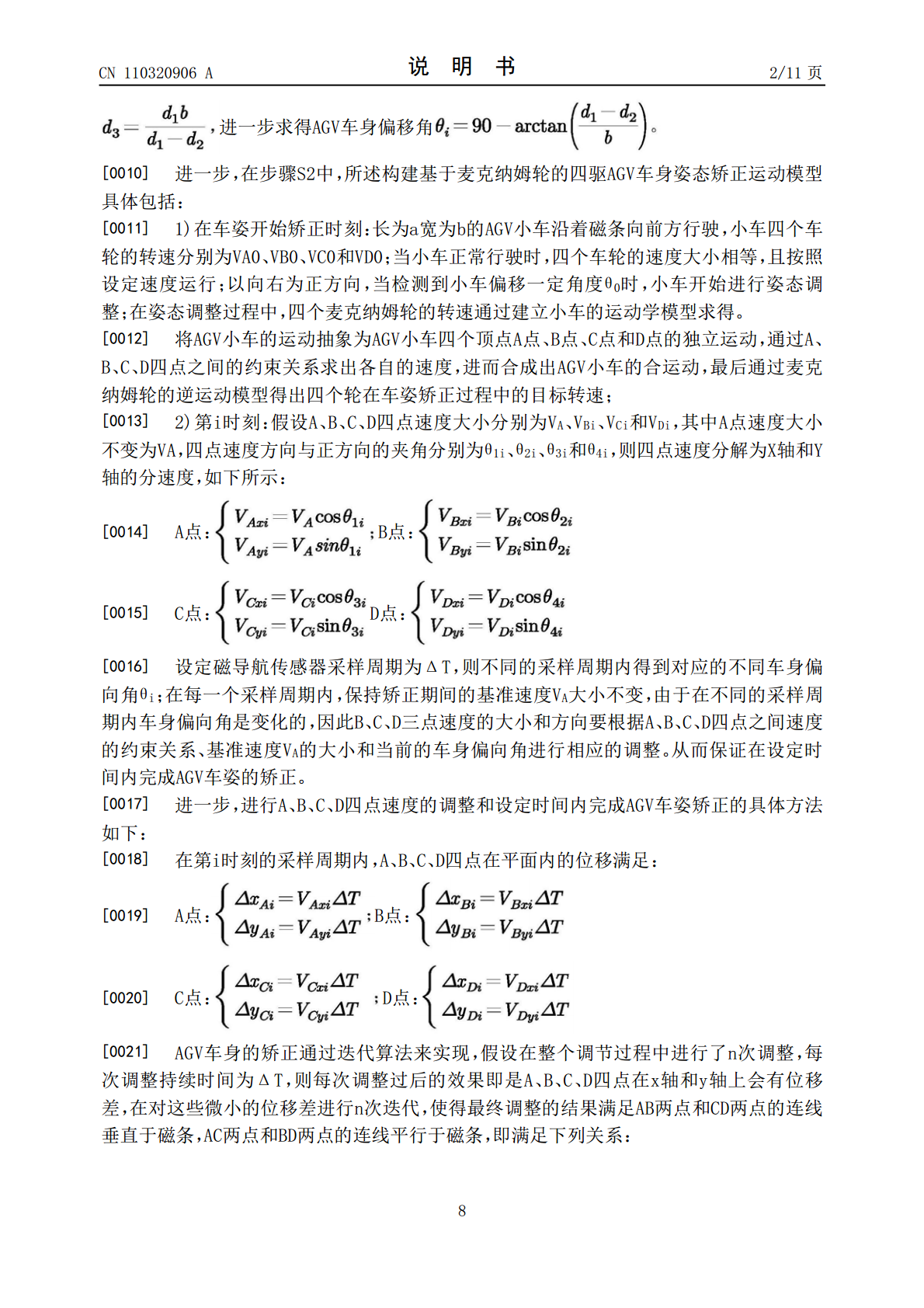
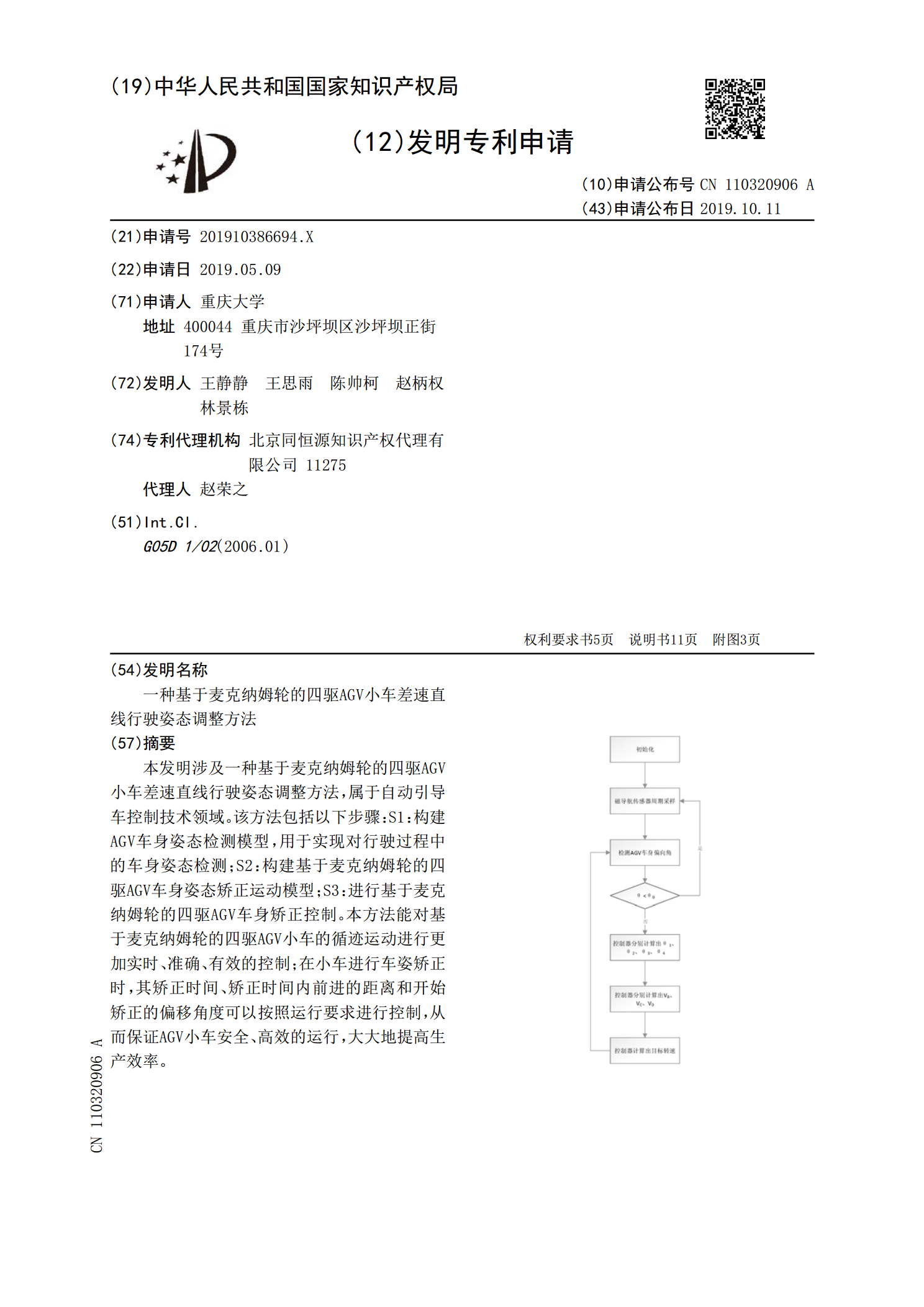
本发明涉及一种基于麦克纳姆轮的四驱AGV小车差速直线行驶姿态调整方法,属于自动引导车控制技术领域。该方法包括以下步骤:S1:构建AGV车身姿态检测模型,用于实现对行驶过程中的车身姿态检测;S2:构建基于麦克纳姆轮的四驱AGV车身姿态矫正运动模型;S3:进行基于麦克纳姆轮的四驱AGV车身矫正控制。本方法能对基于麦克纳姆轮的四驱AGV小车的循迹运动进行更加实时、准确、有效的控制;在小车进行车姿矫正时,其矫正时间、矫正时间内前进的距离和开始矫正的偏移角度可以按照运行要求进行控制,从而保证AGV小车安全、高效的运
麦克纳姆轮AGV自动寻迹行驶系统.pdf
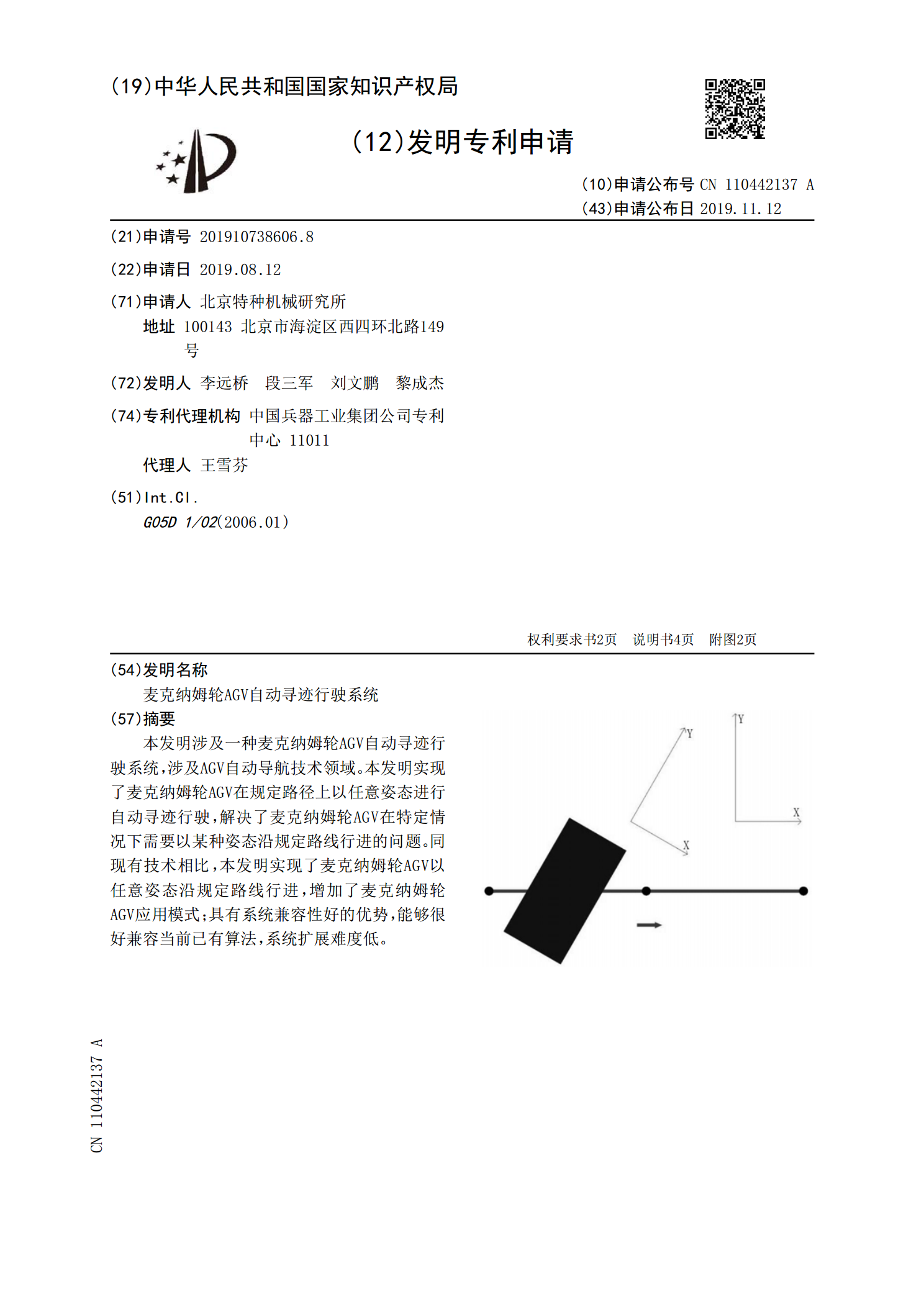
本发明涉及一种麦克纳姆轮AGV自动寻迹行驶系统,涉及AGV自动导航技术领域。本发明实现了麦克纳姆轮AGV在规定路径上以任意姿态进行自动寻迹行驶,解决了麦克纳姆轮AGV在特定情况下需要以某种姿态沿规定路线行进的问题。同现有技术相比,本发明实现了麦克纳姆轮AGV以任意姿态沿规定路线行进,增加了麦克纳姆轮AGV应用模式;具有系统兼容性好的优势,能够很好兼容当前已有算法,系统扩展难度低。
一种麦克纳姆轮AGV的任意姿态导航方法.pdf
本发明涉及一种麦克纳姆轮AGV的任意姿态导航方法,涉及AGV自动导航技术领域。本发明提出的麦克纳姆轮AGV的任意姿态导航方法,用于麦克纳姆轮AGV在规定路径上以任意姿态进行自动寻迹行驶,解决了麦克纳姆轮AGV在特定情况下需要以某种姿态沿规定路线行进的问题。同现有技术相比,本发明实现了麦克纳姆轮AGV以任意姿态沿规定路线行进,增加了麦克纳姆轮AGV应用模式。
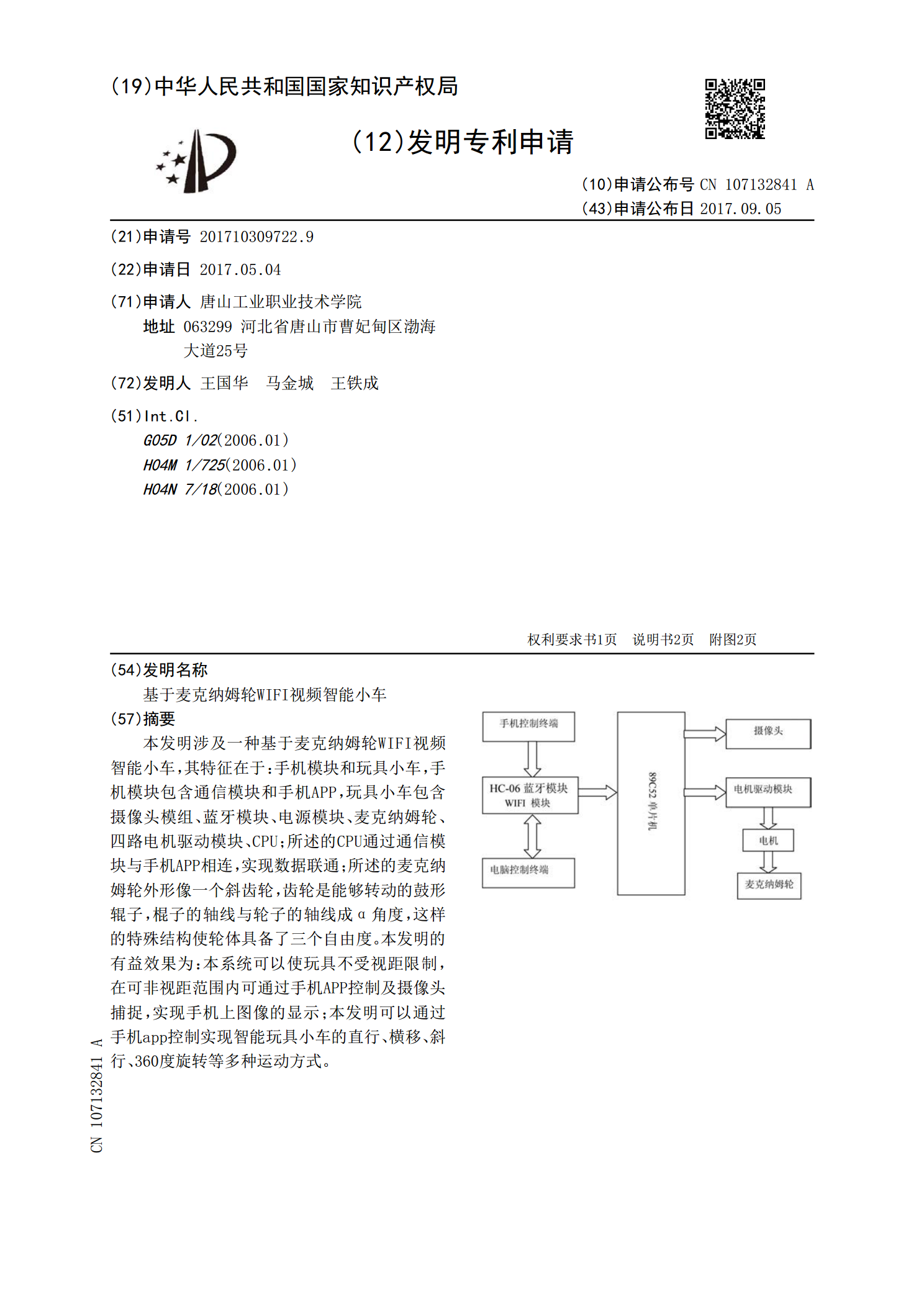
基于麦克纳姆轮WIFI视频智能小车.pdf
本发明涉及一种基于麦克纳姆轮WIFI视频智能小车,其特征在于:手机模块和玩具小车,手机模块包含通信模块和手机APP,玩具小车包含摄像头模组、蓝牙模块、电源模块、麦克纳姆轮、四路电机驱动模块、CPU;所述的CPU通过通信模块与手机APP相连,实现数据联通;所述的麦克纳姆轮外形像一个斜齿轮,齿轮是能够转动的鼓形辊子,棍子的轴线与轮子的轴线成α角度,这样的特殊结构使轮体具备了三个自由度。本发明的有益效果为:本系统可以使玩具不受视距限制,在可非视距范围内可通过手机APP控制及摄像头捕捉,实现手机上图像的显示;本发
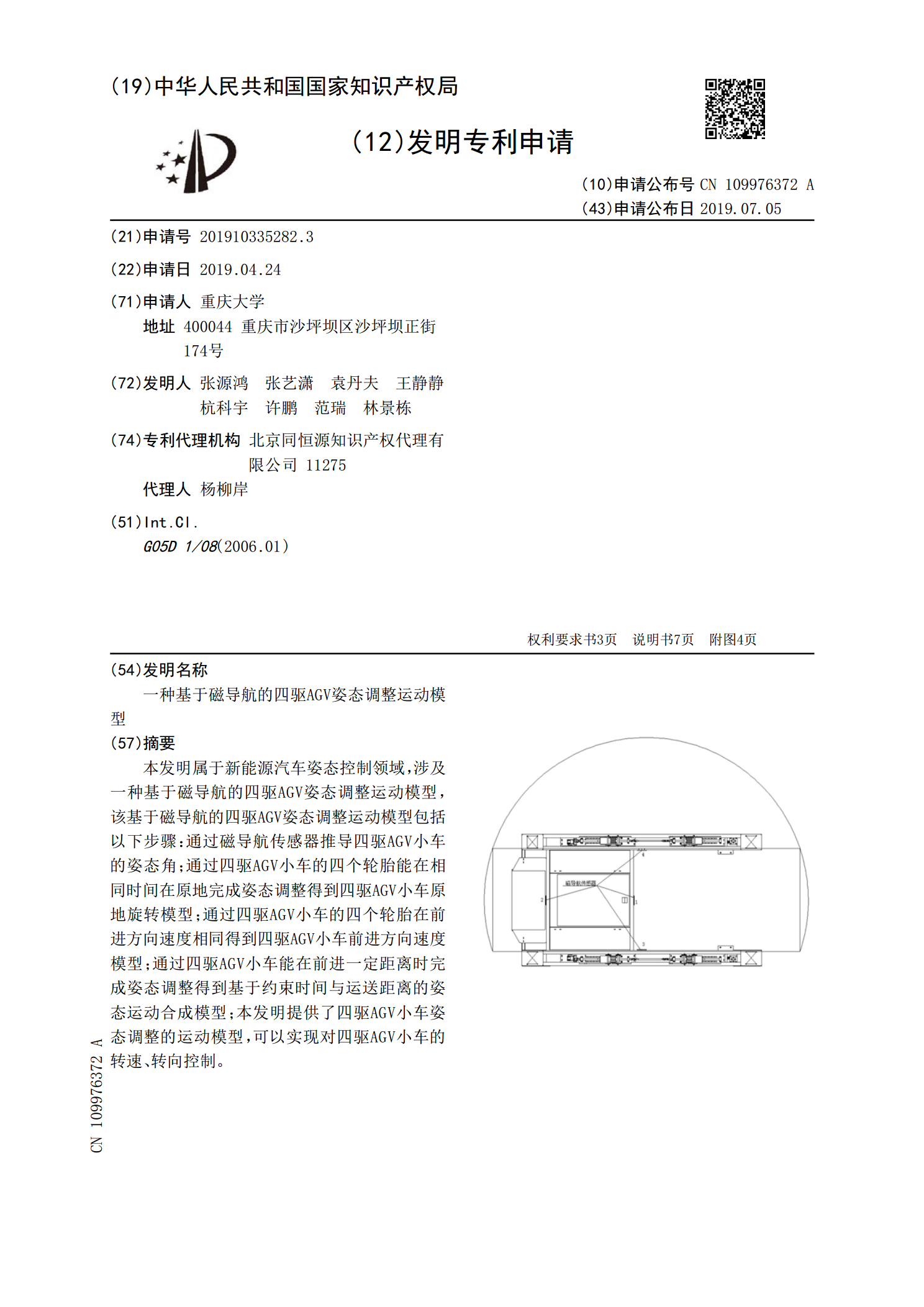
一种基于磁导航的四驱AGV姿态调整运动模型.pdf
本发明属于新能源汽车姿态控制领域,涉及一种基于磁导航的四驱AGV姿态调整运动模型,该基于磁导航的四驱AGV姿态调整运动模型包括以下步骤:通过磁导航传感器推导四驱AGV小车的姿态角;通过四驱AGV小车的四个轮胎能在相同时间在原地完成姿态调整得到四驱AGV小车原地旋转模型;通过四驱AGV小车的四个轮胎在前进方向速度相同得到四驱AGV小车前进方向速度模型;通过四驱AGV小车能在前进一定距离时完成姿态调整得到基于约束时间与运送距离的姿态运动合成模型;本发明提供了四驱AGV小车姿态调整的运动模型,可以实现对四驱AG