
悬挂机构、移动底盘和机器人.pdf

安双****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
悬挂机构、移动底盘和机器人.pdf
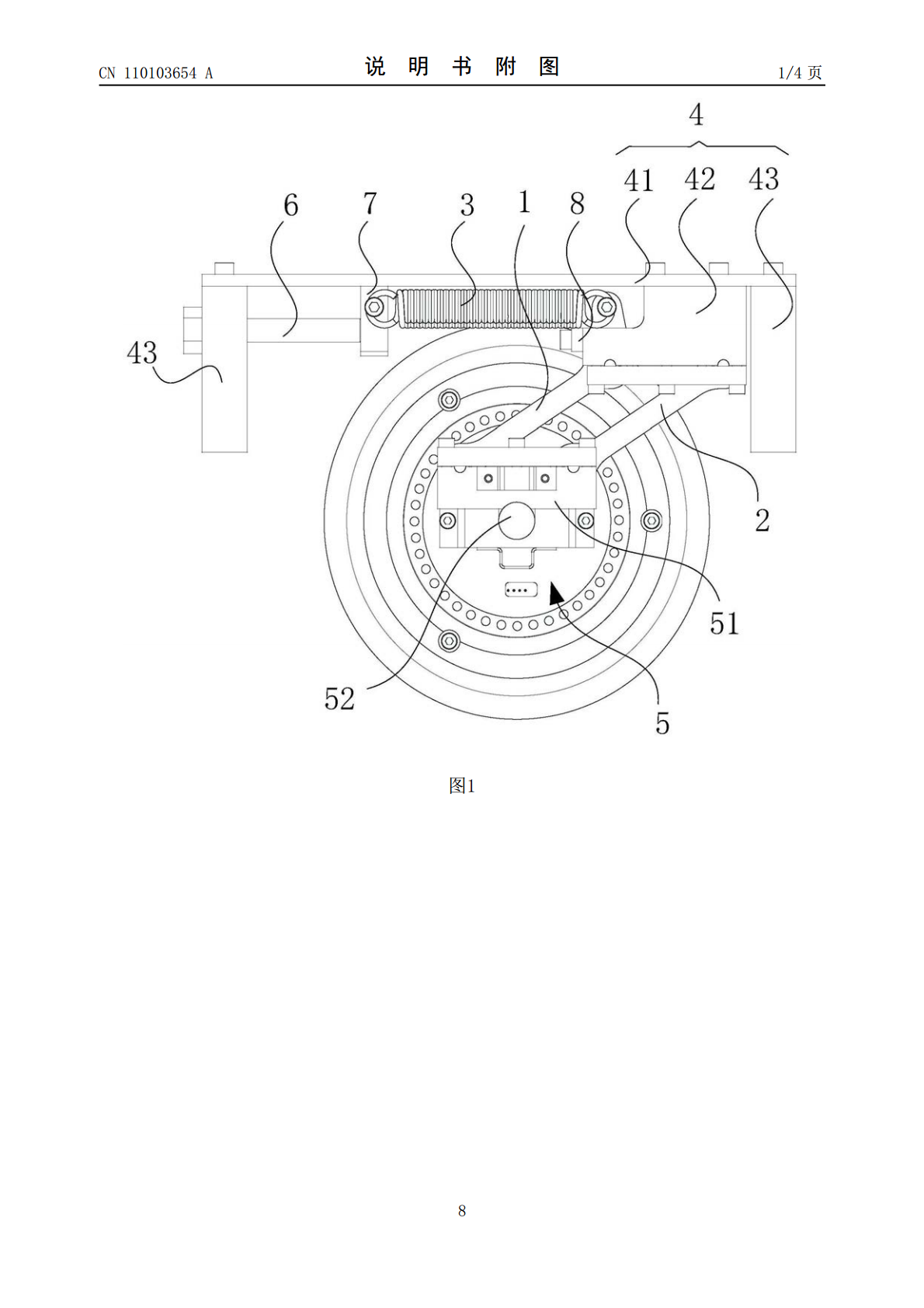
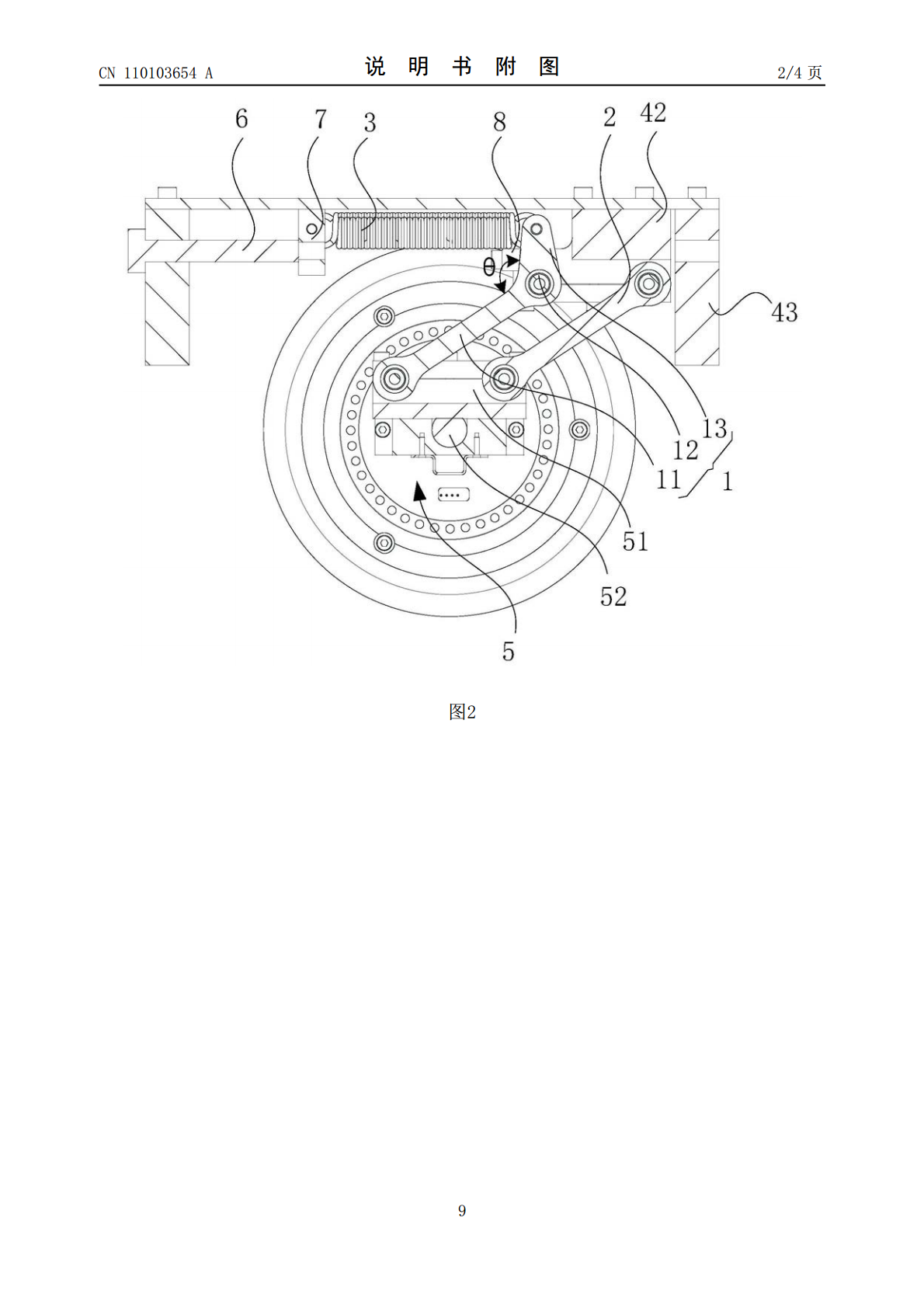
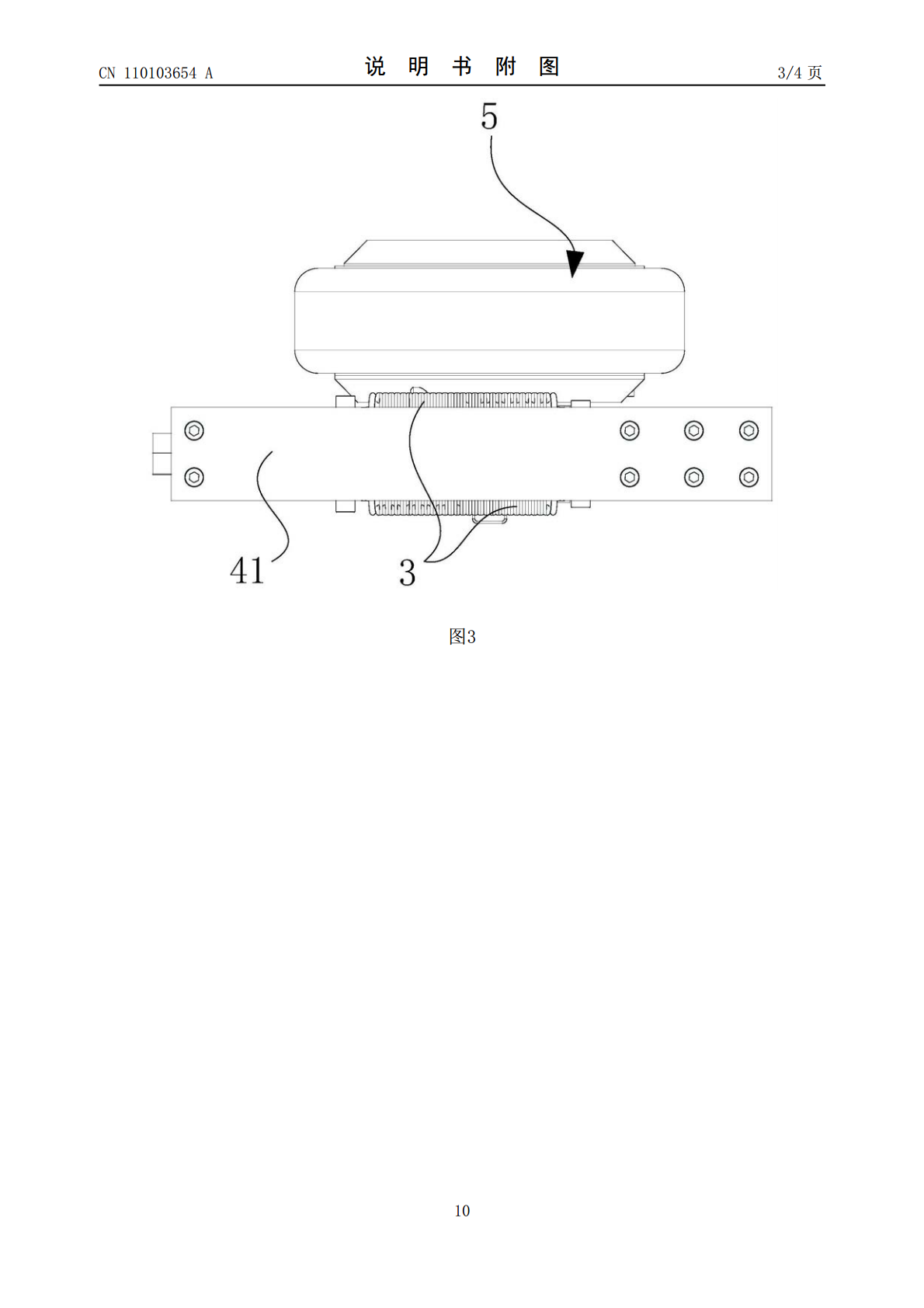
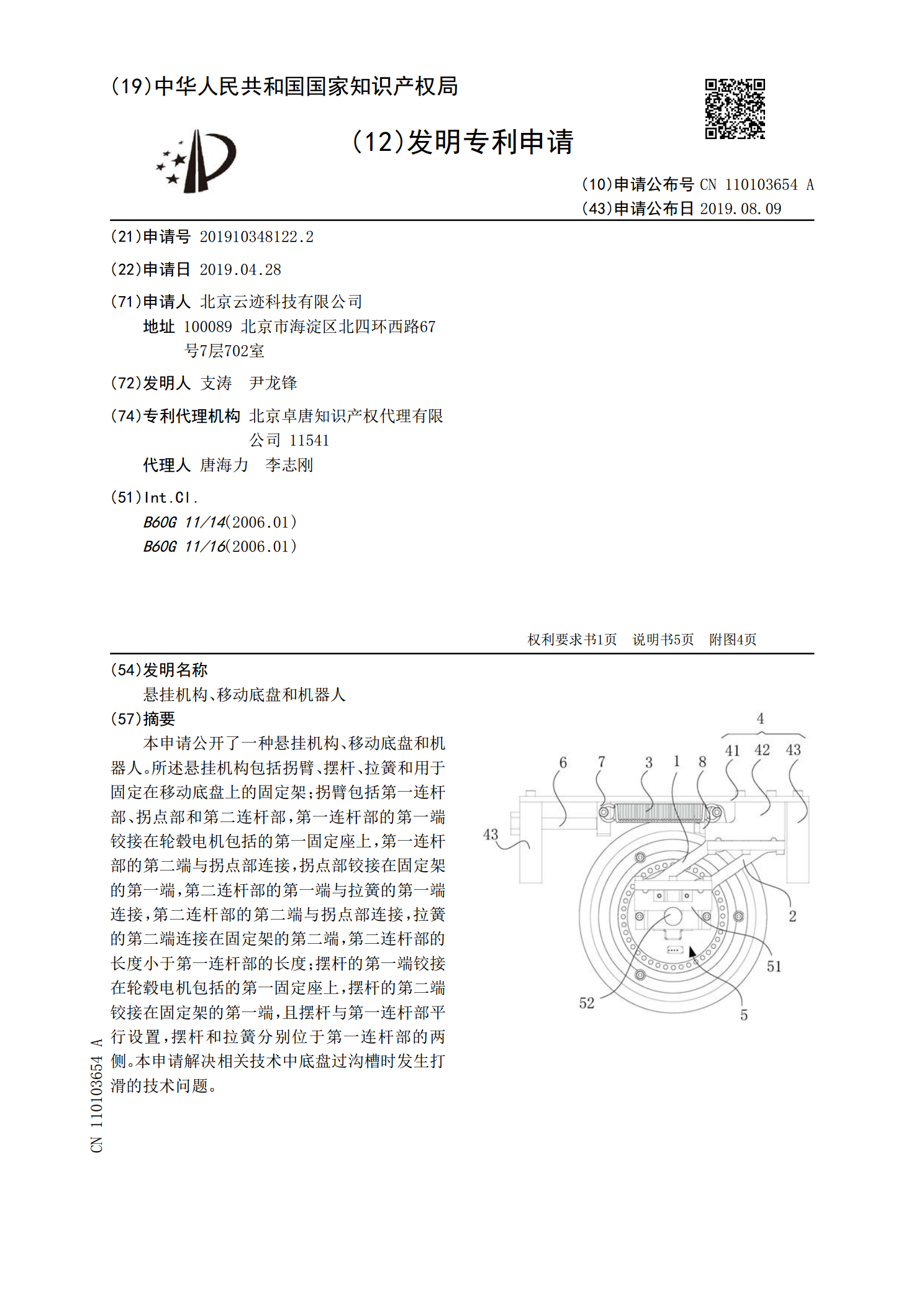
本申请公开了一种悬挂机构、移动底盘和机器人。所述悬挂机构包括拐臂、摆杆、拉簧和用于固定在移动底盘上的固定架;拐臂包括第一连杆部、拐点部和第二连杆部,第一连杆部的第一端铰接在轮毂电机包括的第一固定座上,第一连杆部的第二端与拐点部连接,拐点部铰接在固定架的第一端,第二连杆部的第一端与拉簧的第一端连接,第二连杆部的第二端与拐点部连接,拉簧的第二端连接在固定架的第二端,第二连杆部的长度小于第一连杆部的长度;摆杆的第一端铰接在轮毂电机包括的第一固定座上,摆杆的第二端铰接在固定架的第一端,且摆杆与第一连杆部平行设置,
悬挂机构、移动底盘和机器人.pdf
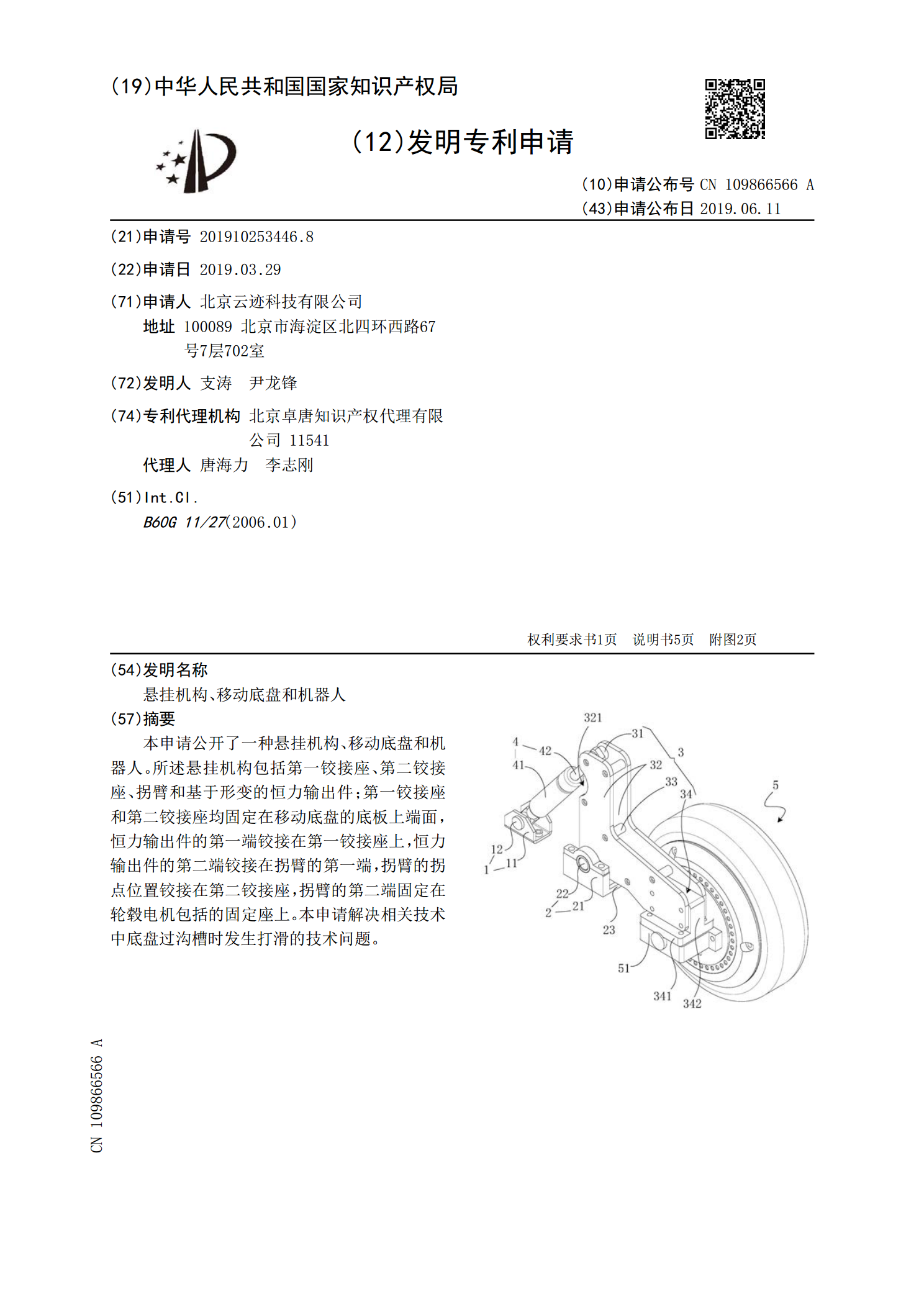
本申请公开了一种悬挂机构、移动底盘和机器人。所述悬挂机构包括第一铰接座、第二铰接座、拐臂和基于形变的恒力输出件;第一铰接座和第二铰接座均固定在移动底盘的底板上端面,恒力输出件的第一端铰接在第一铰接座上,恒力输出件的第二端铰接在拐臂的第一端,拐臂的拐点位置铰接在第二铰接座,拐臂的第二端固定在轮毂电机包括的固定座上。本申请解决相关技术中底盘过沟槽时发生打滑的技术问题。

防撞机构、移动底盘和机器人.pdf
本申请公开了一种防撞机构、移动底盘和机器人。所述防撞机构包括第一安装块、弹性铰链、防撞梁、第二安装块和用于与移动底盘的停车装置建立有通讯连接的触碰开关;第一安装块和第二安装块安装在移动底盘的上,弹性铰链安装在第一安装块上,防撞梁的一端连接在弹性铰链上,触碰开关的固定在第二安装块上,触碰开关的开关触发端向防撞梁延伸,且触碰开关的开关触发端与防撞梁之间设有第一间隙,防撞梁的侧壁延伸出移动底盘,以使当防撞梁受外力影响触碰触碰开关的开关触发端时,触碰开关向停车装置发送停车信号。本申请解决了相关技术中移动底盘无法识
悬架机构、可移动底盘及机器人.pdf
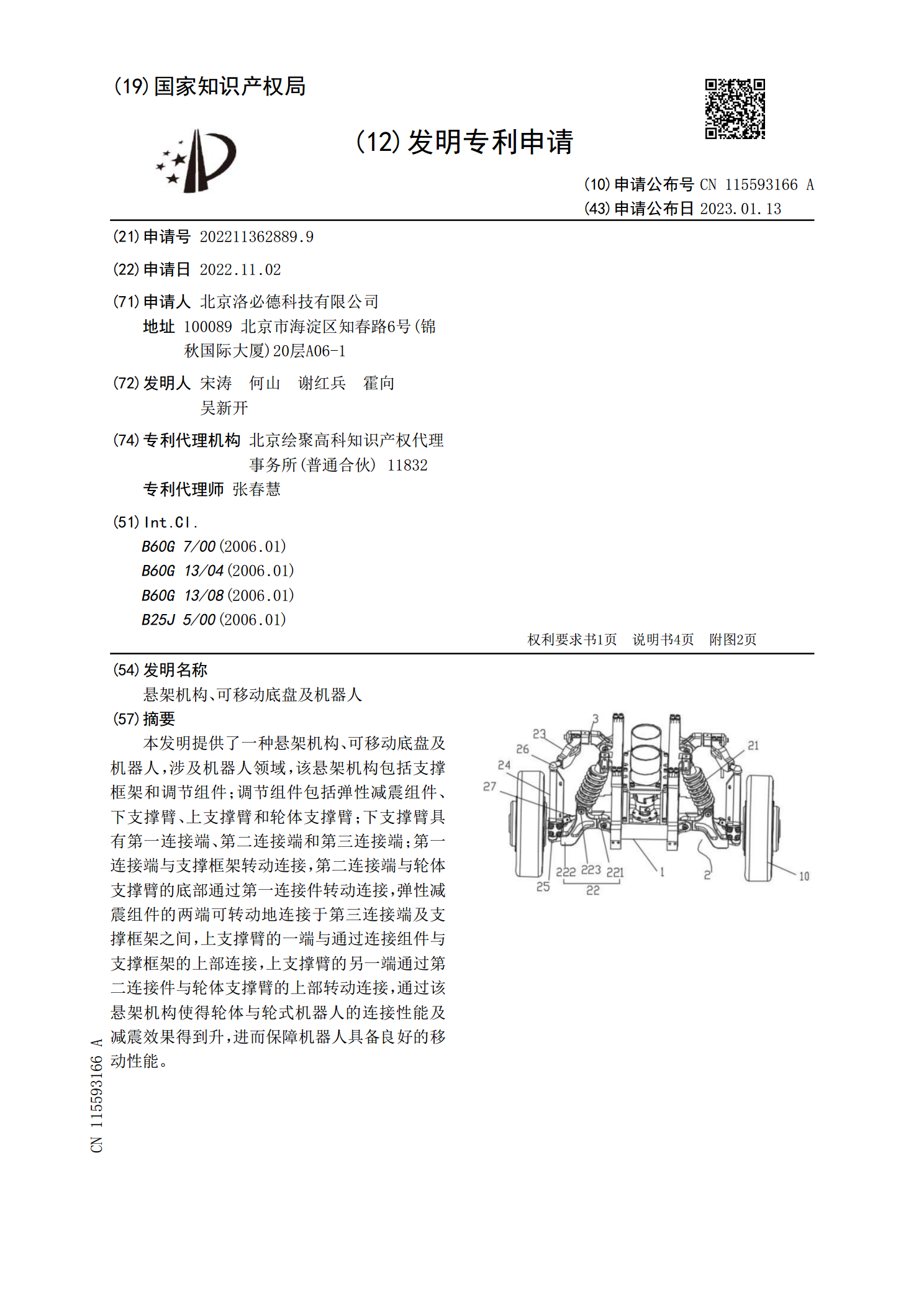
本发明提供了一种悬架机构、可移动底盘及机器人,涉及机器人领域,该悬架机构包括支撑框架和调节组件;调节组件包括弹性减震组件、下支撑臂、上支撑臂和轮体支撑臂;下支撑臂具有第一连接端、第二连接端和第三连接端;第一连接端与支撑框架转动连接,第二连接端与轮体支撑臂的底部通过第一连接件转动连接,弹性减震组件的两端可转动地连接于第三连接端及支撑框架之间,上支撑臂的一端与通过连接组件与支撑框架的上部连接,上支撑臂的另一端通过第二连接件与轮体支撑臂的上部转动连接,通过该悬架机构使得轮体与轮式机器人的连接性能及减震效果得到升
移动底盘和机器人.pdf
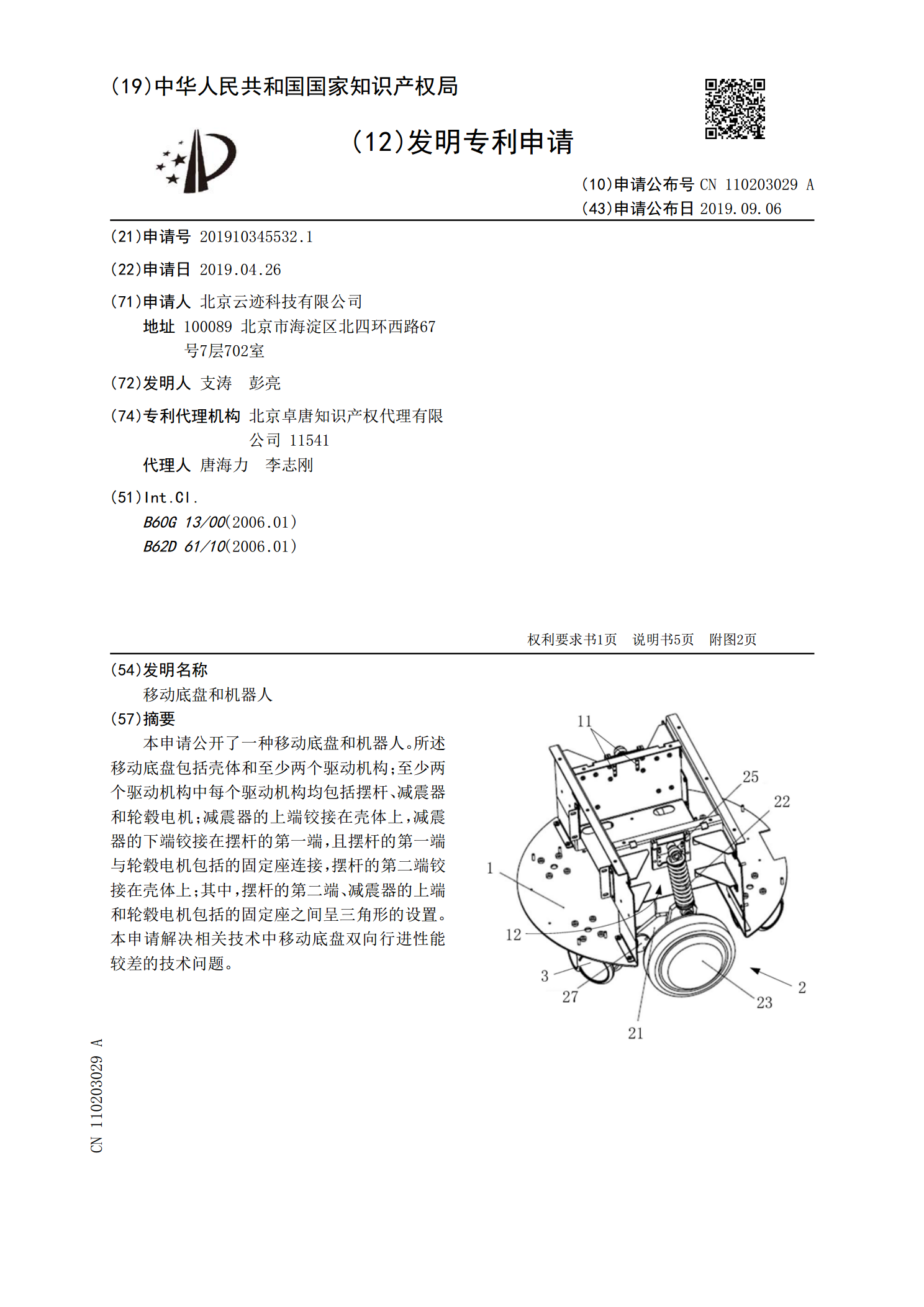
本申请公开了一种移动底盘和机器人。所述移动底盘包括壳体和至少两个驱动机构;至少两个驱动机构中每个驱动机构均包括摆杆、减震器和轮毂电机;减震器的上端铰接在壳体上,减震器的下端铰接在摆杆的第一端,且摆杆的第一端与轮毂电机包括的固定座连接,摆杆的第二端铰接在壳体上;其中,摆杆的第二端、减震器的上端和轮毂电机包括的固定座之间呈三角形的设置。本申请解决相关技术中移动底盘双向行进性能较差的技术问题。