
一种单电机双足机器人.pdf

淑然****by

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种单电机双足机器人.pdf
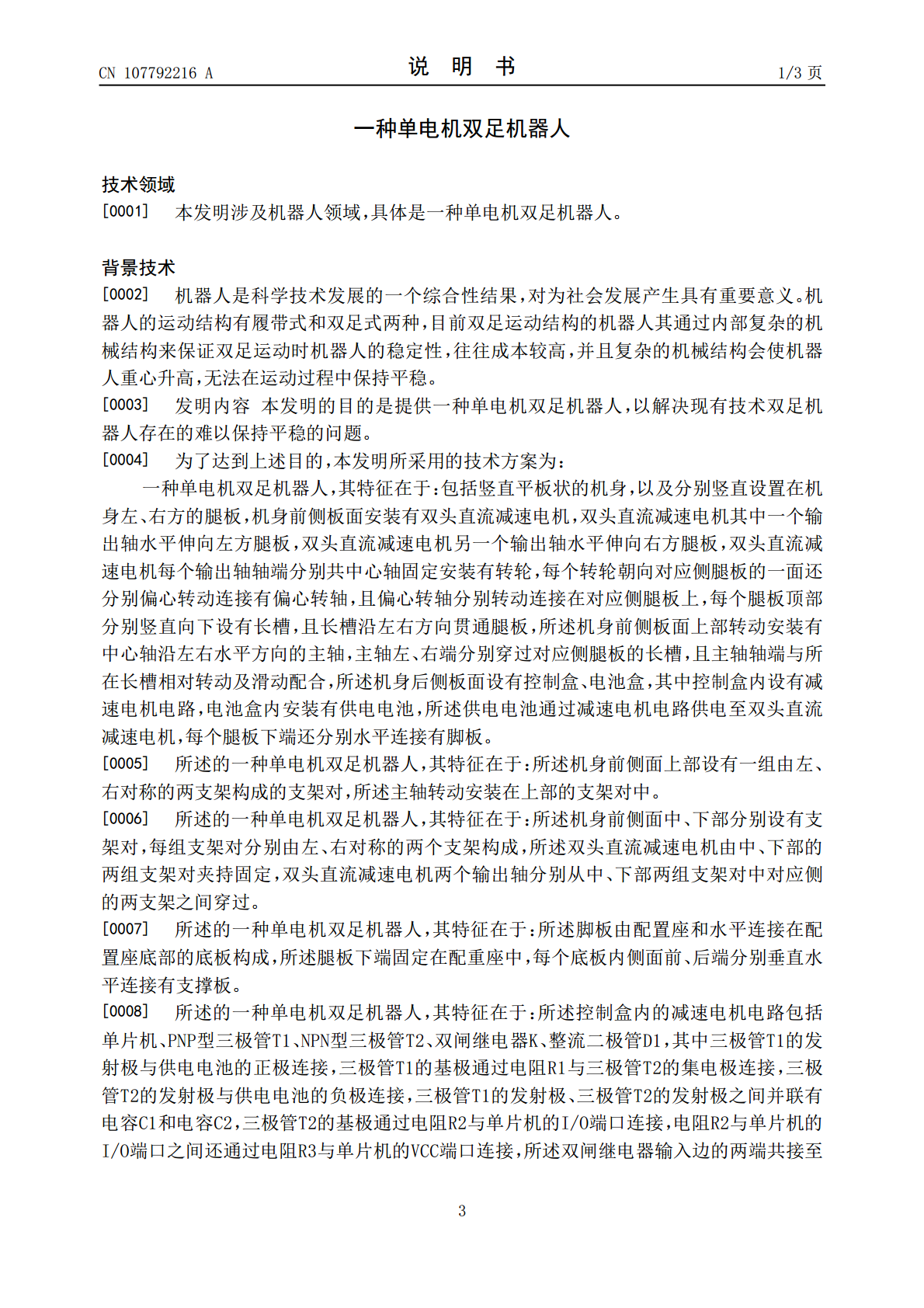
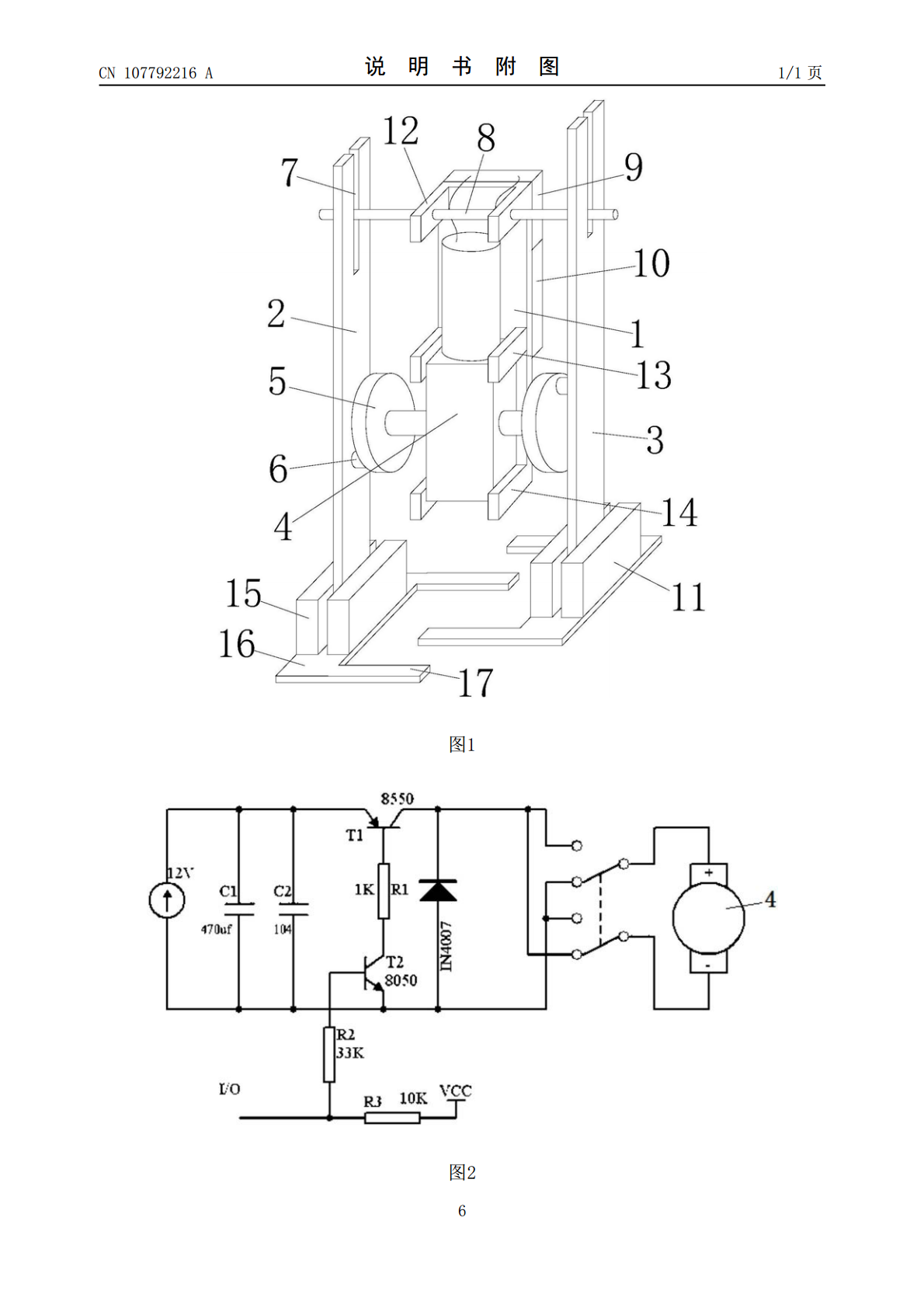
本发明公开了一种单电机双足机器人,包括机身,以及分别竖直设置在机身左、右方的腿板,机身前侧板面安装有双头直流减速电机,双头直流减速电机每个输出轴轴端分别共中心轴固定安装有转轮,每个转轮分别通过偏心转轴与对应侧腿板偏心转动连接,每个腿板顶部分别竖直向下设有长槽,机身前侧板面上部转动安装有中心轴沿左右水平方向的主轴,主轴左、右端分别穿过对应侧腿板的长槽,且主轴轴端与所在长槽相对转动及滑动配合,机身后侧板面设有控制盒、电池盒,其中控制盒内设有减速电机电路,电池盒内供电电池通过减速电机电路供电至双头直流减速电机。
一种双足机器人控制方法、装置、双足机器人及存储介质.pdf
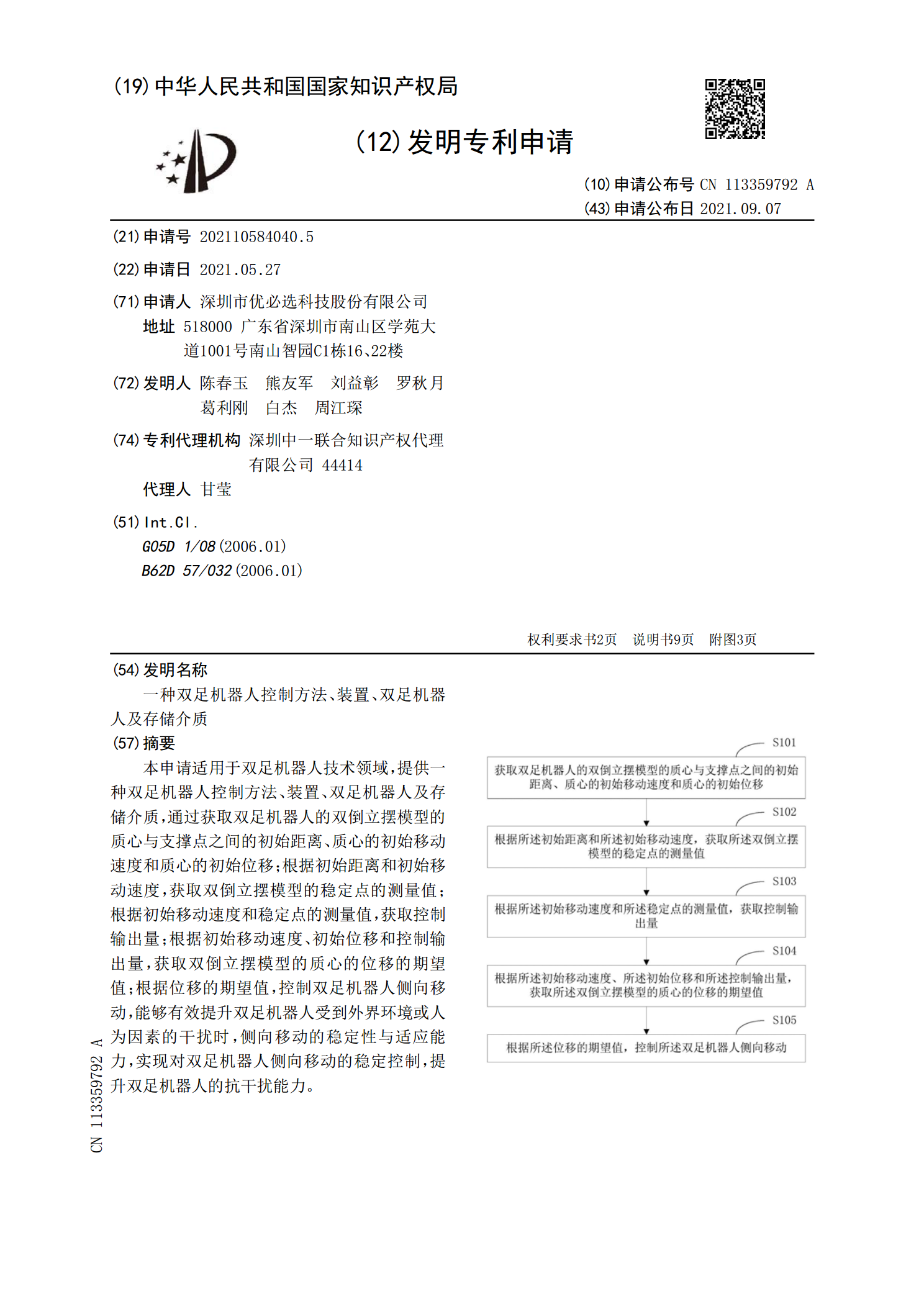
本申请适用于双足机器人技术领域,提供一种双足机器人控制方法、装置、双足机器人及存储介质,通过获取双足机器人的双倒立摆模型的质心与支撑点之间的初始距离、质心的初始移动速度和质心的初始位移;根据初始距离和初始移动速度,获取双倒立摆模型的稳定点的测量值;根据初始移动速度和稳定点的测量值,获取控制输出量;根据初始移动速度、初始位移和控制输出量,获取双倒立摆模型的质心的位移的期望值;根据位移的期望值,控制双足机器人侧向移动,能够有效提升双足机器人受到外界环境或人为因素的干扰时,侧向移动的稳定性与适应能力,实现对双足

一种双足行走机器人.pdf
本发明涉及机器人技术领域,尤其是一种双足行走机器人,包括四边形框架,所述四边形框架内部设有动力传输机构,所述旋转电机的动力输出轴上固接有第四带轮,所述第四带轮通过皮带与固接在中间转轴上的第三带轮连接,中间转轴上同轴固接有两个第二带轮,两个第二带轮分别置于第三带轮两侧,每个连接板上均转动连接有一个竖直设置的支撑板,每个支撑板底端均固接有一个支撑脚,旋转电机上连接有plc控制器,所述plc控制器连接有自动避障模块、语音播报模块、无线控制模块。本装置结构简单,使用方便,制造成本很低,运动过程中能够通过自动避障模

电机驱动四足机器人单腿系统设计与实现.docx
电机驱动四足机器人单腿系统设计与实现标题:电机驱动四足机器人单腿系统设计与实现摘要:四足机器人是一种具有较强适应能力和稳定性的机器人形态,被广泛应用于各个领域中。本文针对四足机器人的单腿系统进行了设计与实现,主要包括电机选择、驱动方式、控制系统以及仿真和实验验证。通过合理的设计和优化,确保机器人单腿系统具备具有较高的驱动能力、稳定性和灵活性,并实现了模拟和实际测试。本文的研究成果对于四足机器人的整体控制和实际应用具有一定的参考价值。关键词:四足机器人、单腿系统、电机驱动、稳定性、控制系统1.引言四足机器人

双足机器人.doc
培训题目培训时间培训地点培训老师1竞赛用电子技术综述5月24日19:00-20:35二西601教室张叶2竞赛用单片机技术5月27日19:00-20:35二西601教室张叶3竞赛用电子电路通用设计技术5月29日19:00-20:35二西601教室张叶4传感器与检测技术6月5日19:00-20:35二西601教室张叶(4)报名要求及选拔参赛要求:以团队为基本单位报名。每个团队不得多于3人。初赛阶段每队必须参加比赛培训。培训期间每队须撰写作品方案,作品方案通过的队伍方可进入决赛。所有的参赛队为便于统一安排协调,