
一种机器人手臂关节用磁场调制电机磁路结构.pdf

哲妍****彩妍

1/10
2/10
3/10
4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机器人手臂关节用磁场调制电机磁路结构.pdf
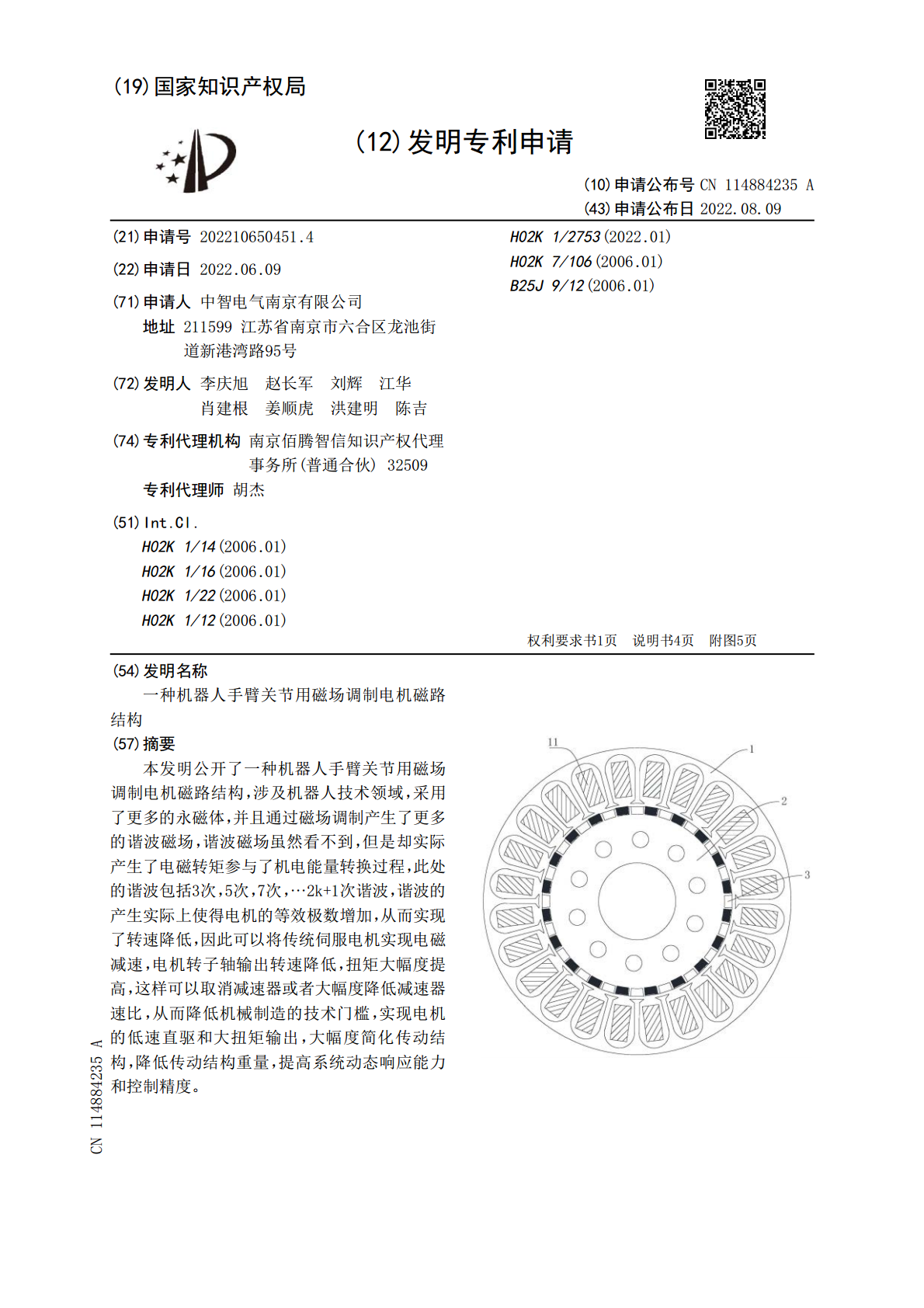
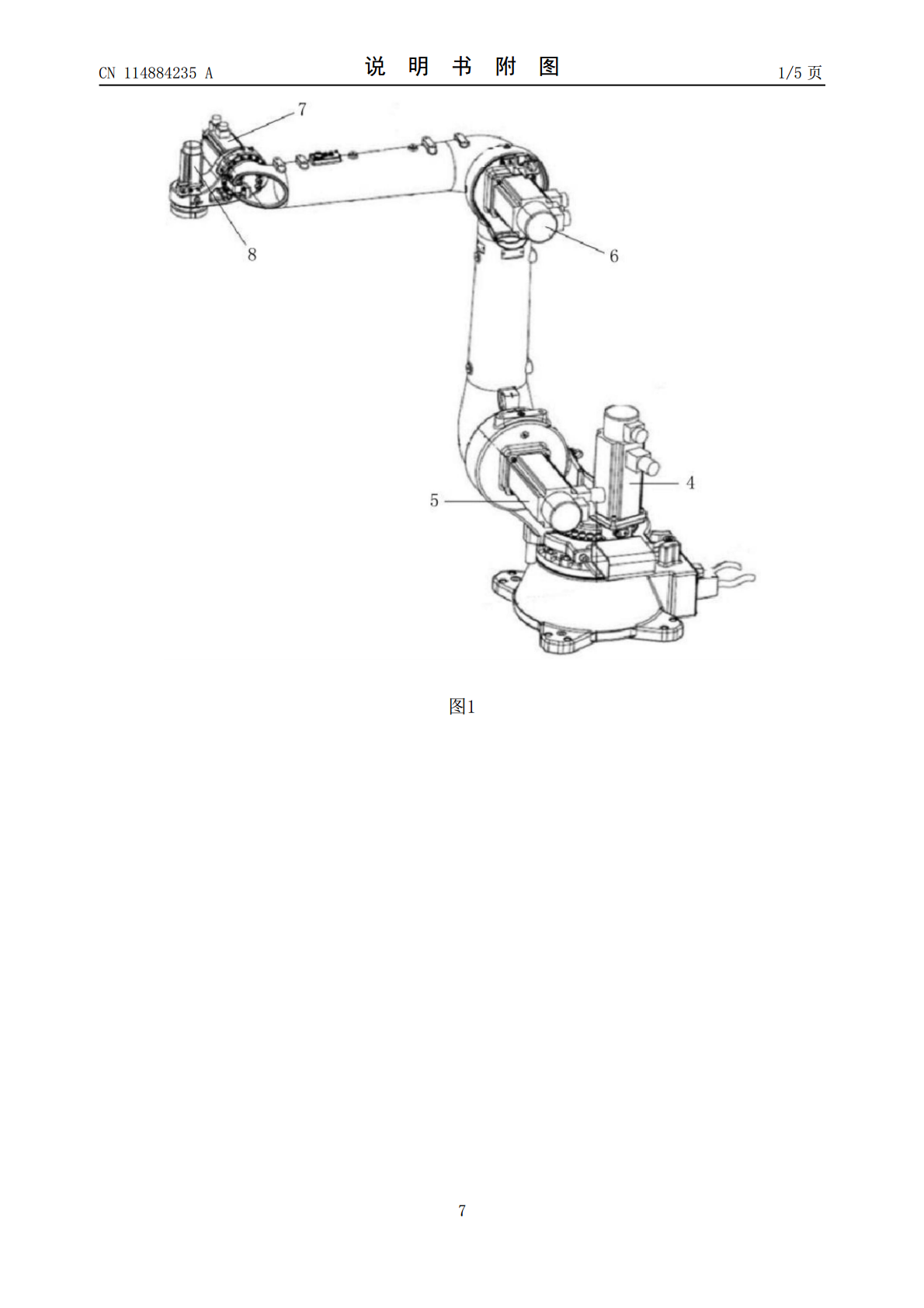
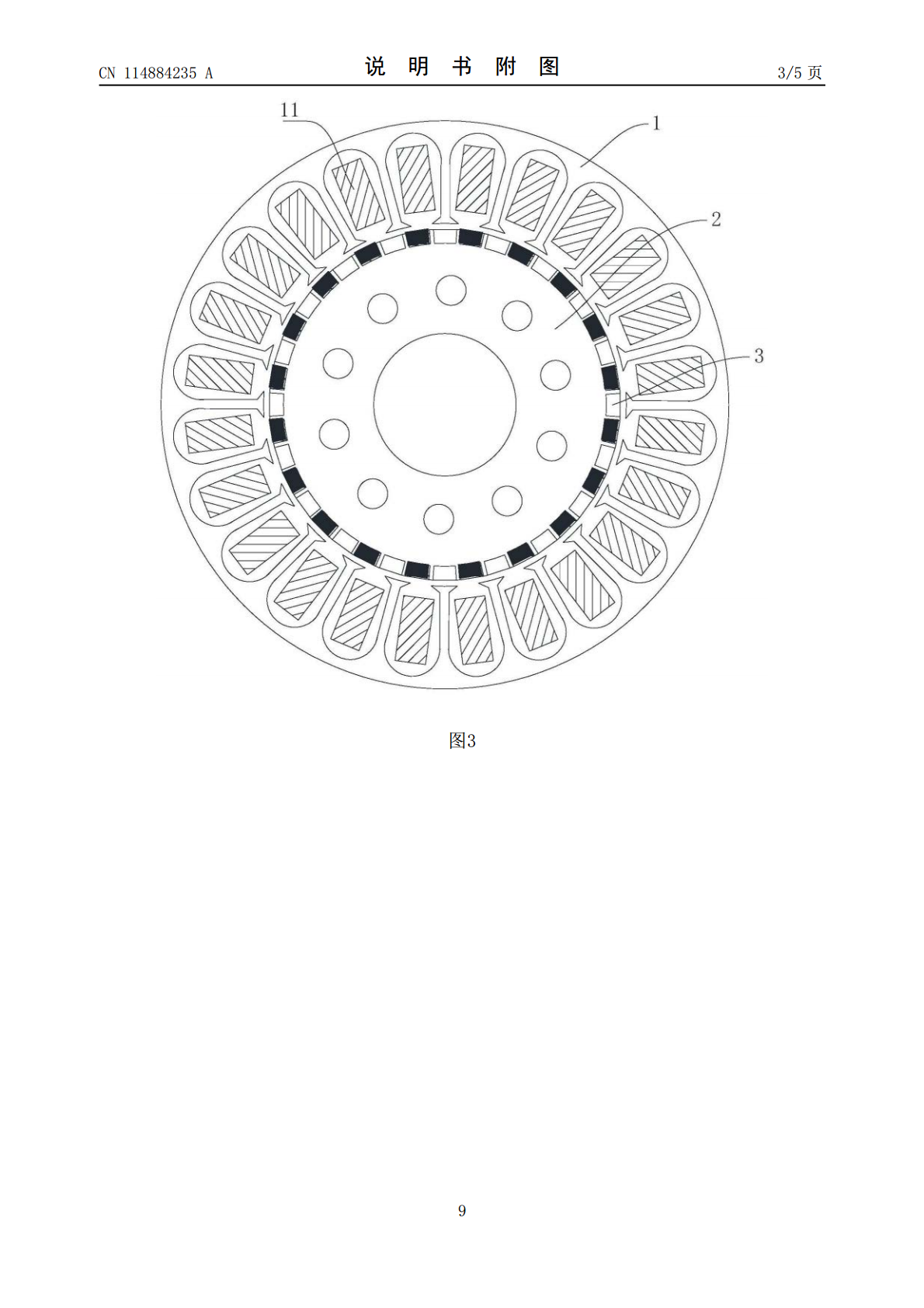
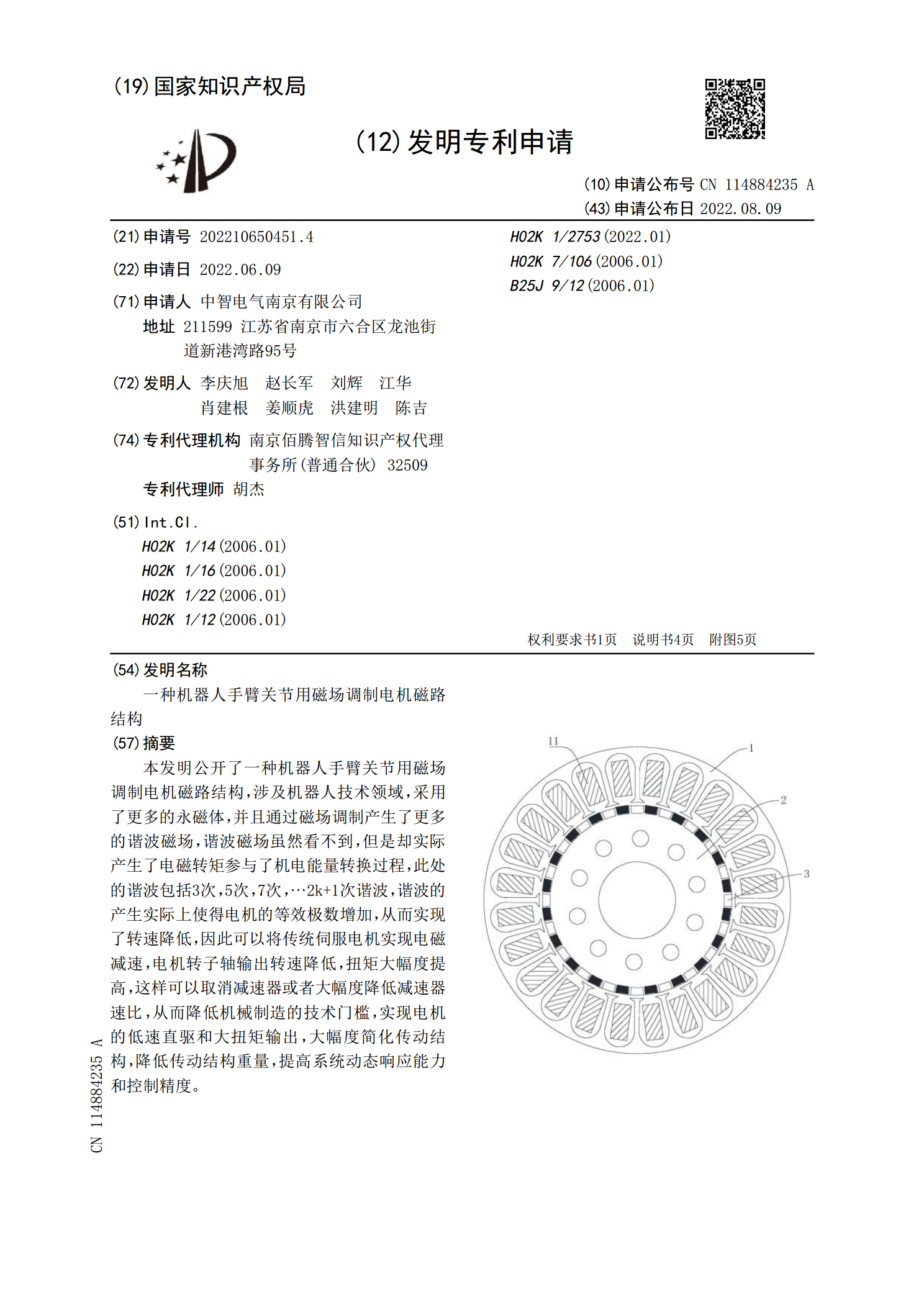
本发明公开了一种机器人手臂关节用磁场调制电机磁路结构,涉及机器人技术领域,采用了更多的永磁体,并且通过磁场调制产生了更多的谐波磁场,谐波磁场虽然看不到,但是却实际产生了电磁转矩参与了机电能量转换过程,此处的谐波包括3次,5次,7次,…2k+1次谐波,谐波的产生实际上使得电机的等效极数增加,从而实现了转速降低,因此可以将传统伺服电机实现电磁减速,电机转子轴输出转速降低,扭矩大幅度提高,这样可以取消减速器或者大幅度降低减速器速比,从而降低机械制造的技术门槛,实现电机的低速直驱和大扭矩输出,大幅度简化传动结构,
一种手臂结构及机器人.pdf
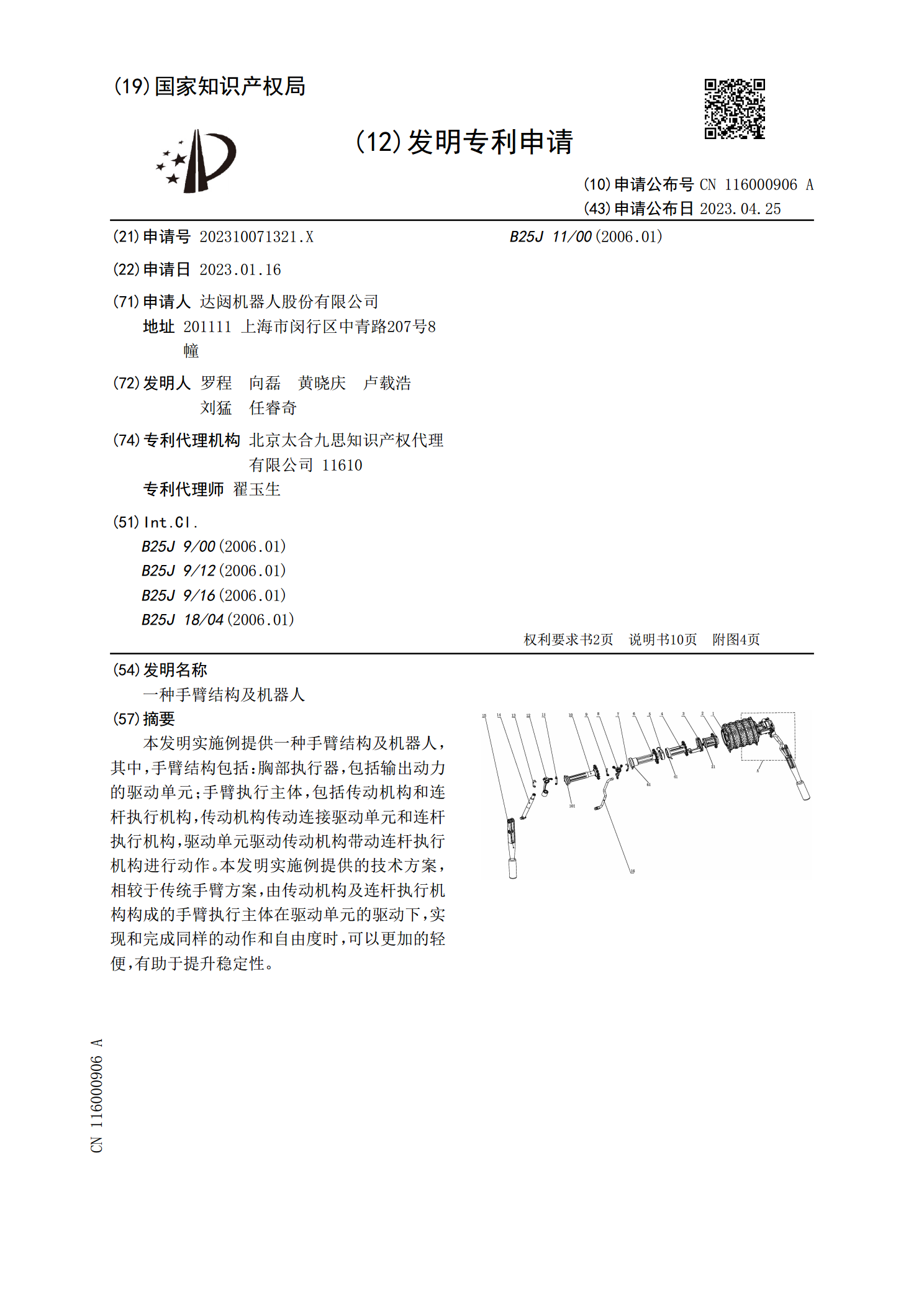
本发明实施例提供一种手臂结构及机器人,其中,手臂结构包括:胸部执行器,包括输出动力的驱动单元;手臂执行主体,包括传动机构和连杆执行机构,传动机构传动连接驱动单元和连杆执行机构,驱动单元驱动传动机构带动连杆执行机构进行动作。本发明实施例提供的技术方案,相较于传统手臂方案,由传动机构及连杆执行机构构成的手臂执行主体在驱动单元的驱动下,实现和完成同样的动作和自由度时,可以更加的轻便,有助于提升稳定性。
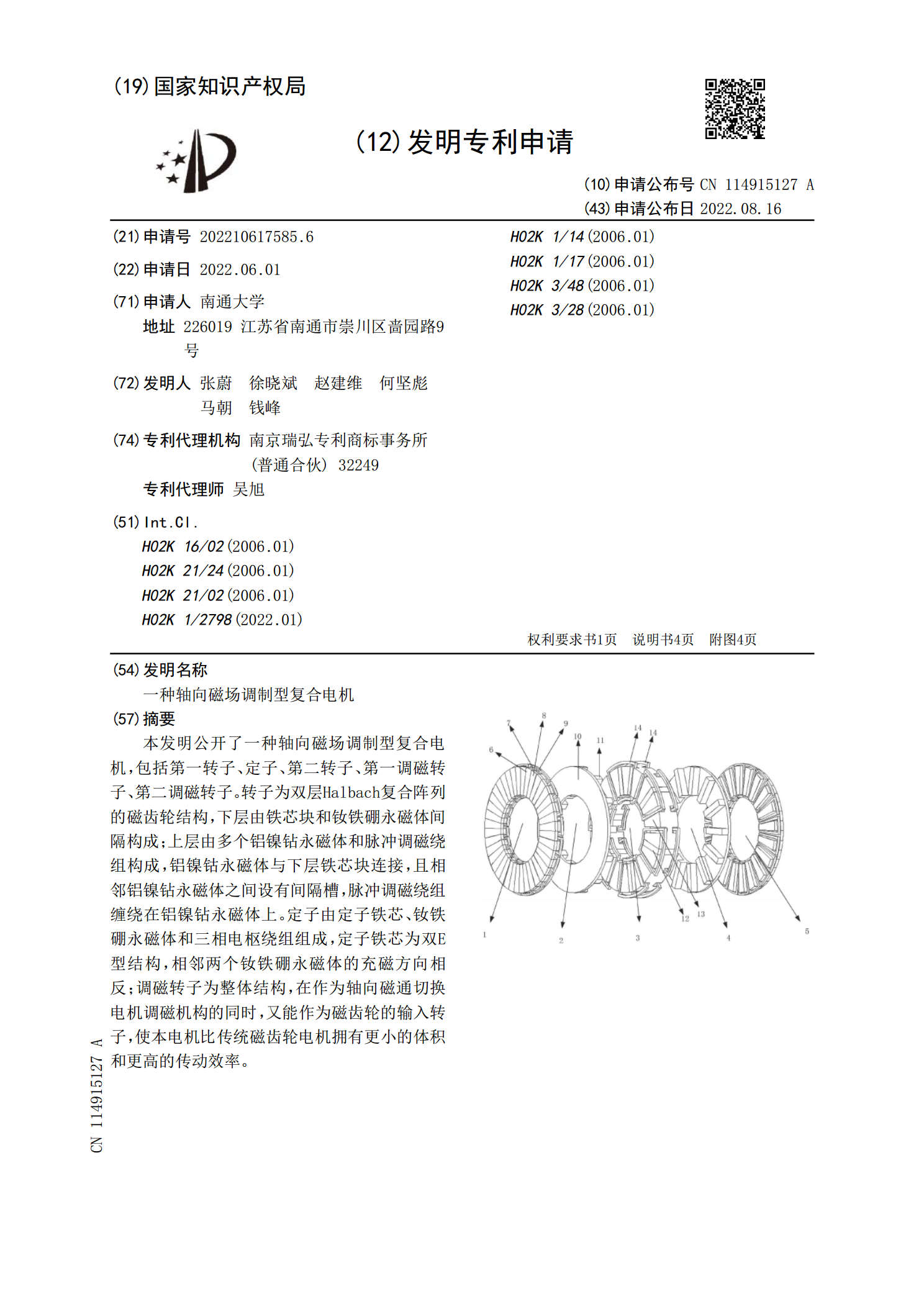
一种轴向磁场调制型复合电机.pdf
本发明公开了一种轴向磁场调制型复合电机,包括第一转子、定子、第二转子、第一调磁转子、第二调磁转子。转子为双层Halbach复合阵列的磁齿轮结构,下层由铁芯块和钕铁硼永磁体间隔构成;上层由多个铝镍钻永磁体和脉冲调磁绕组构成,铝镍钴永磁体与下层铁芯块连接,且相邻铝镍钻永磁体之间设有间隔槽,脉冲调磁绕组缠绕在铝镍钻永磁体上。定子由定子铁芯、钕铁硼永磁体和三相电枢绕组组成,定子铁芯为双E型结构,相邻两个钕铁硼永磁体的充磁方向相反;调磁转子为整体结构,在作为轴向磁通切换电机调磁机构的同时,又能作为磁齿轮的输入转子,
直流电机的磁场和磁路.ppt
§2-3直流电机的磁场励磁方式直流电机的磁场和磁路二、空载时磁场分布二、空载时磁场分布磁通、磁路主磁通和漏磁通励磁磁势的计算*气隙磁场空载磁化曲线三、直流电机负载时磁场电枢磁场、电枢反应的定义交轴磁势2.直轴磁势3.交轴电枢反应电枢绕组产生的磁场密度计算交轴电枢反应性质如图交轴电枢反应性质4.直轴电枢反应§2-4直流电机的感应电势和电磁转矩直流电机的感应电势电枢电势的认识二、电磁转矩电磁转矩的认识三、电磁功率

-直流电机的磁场和磁路.ppt
励磁方式直流电机的磁场和磁路二、空载时磁场分布二、空载时磁场分布磁通、磁路主磁通和漏磁通励磁磁势的计算*气隙磁场空载磁化曲线三、直流电机负载时磁场电枢磁场、电枢反应的定义交轴磁势2.直轴磁势3.交轴电枢反应电枢绕组产生的磁场密度计算交轴电枢反应性质如图交轴电枢反应性质4.直轴电枢反应§2-4直流电机的感应电势和电磁转矩直流电机的感应电势电枢电势的认识二、电磁转矩电磁转矩的认识三、电磁功率