
一种便于进行安装机械臂用固定装置.pdf

一吃****春晓

1/9

2/9

3/9

4/9

5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种便于进行安装机械臂用固定装置.pdf
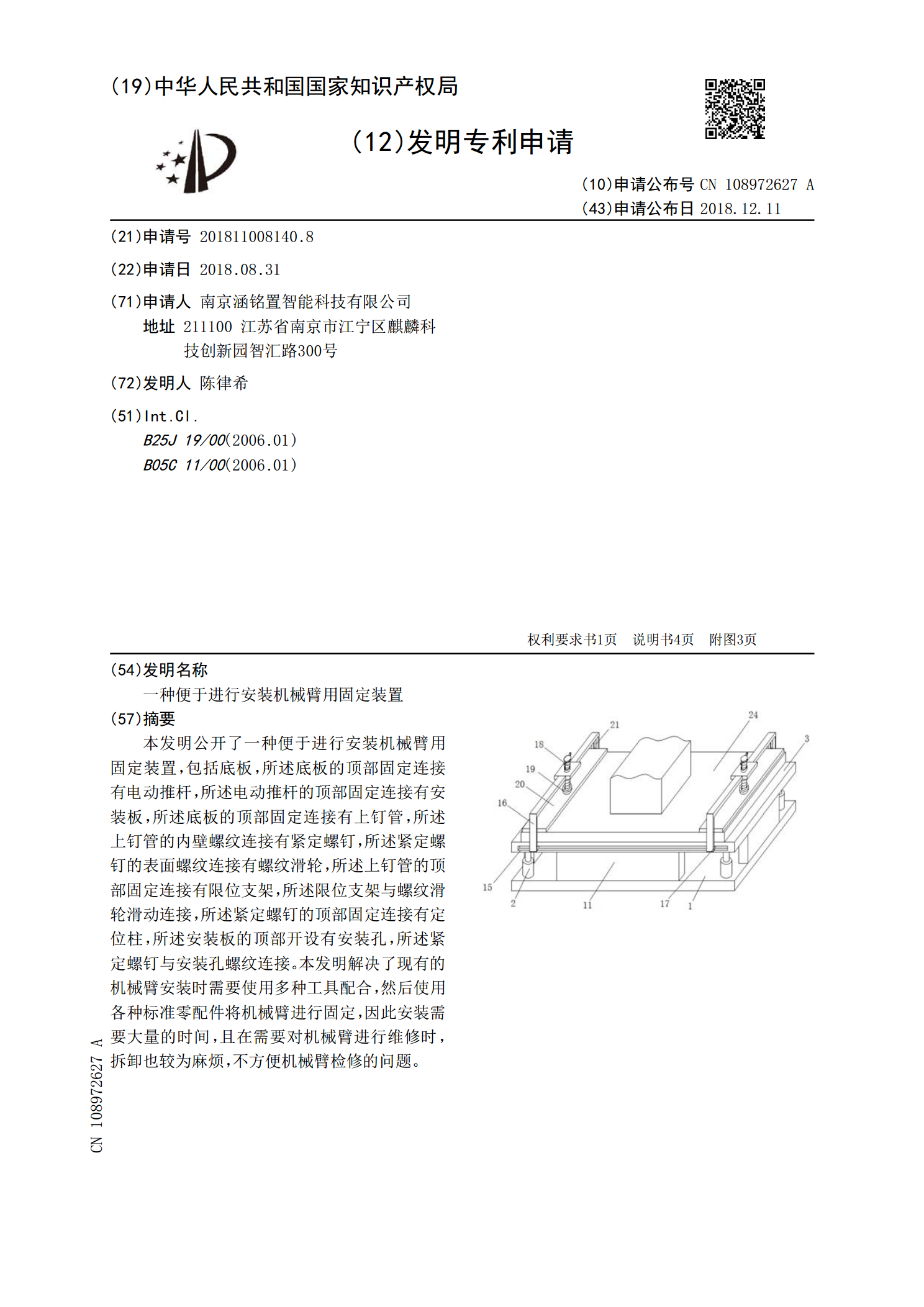
本发明公开了一种便于进行安装机械臂用固定装置,包括底板,所述底板的顶部固定连接有电动推杆,所述电动推杆的顶部固定连接有安装板,所述底板的顶部固定连接有上钉管,所述上钉管的内壁螺纹连接有紧定螺钉,所述紧定螺钉的表面螺纹连接有螺纹滑轮,所述上钉管的顶部固定连接有限位支架,所述限位支架与螺纹滑轮滑动连接,所述紧定螺钉的顶部固定连接有定位柱,所述安装板的顶部开设有安装孔,所述紧定螺钉与安装孔螺纹连接。本发明解决了现有的机械臂安装时需要使用多种工具配合,然后使用各种标准零配件将机械臂进行固定,因此安装需要大量的时间
一种便于进行安装机械臂用固定装置.pdf
本发明公开了一种便于进行安装机械臂用固定装置,包括底板,所述底板的顶部固定连接有电动推杆,所述电动推杆的顶部固定连接有安装板,所述底板的顶部固定连接有上钉管,所述上钉管的内壁螺纹连接有紧定螺钉,所述紧定螺钉的表面螺纹连接有螺纹滑轮,所述上钉管的顶部固定连接有限位支架,所述限位支架与螺纹滑轮滑动连接,所述紧定螺钉的顶部固定连接有定位柱,所述安装板的顶部开设有安装孔,所述紧定螺钉与安装孔螺纹连接。本发明解决了现有的机械臂安装时需要使用多种工具配合,然后使用各种标准零配件将机械臂进行固定,因此安装需要大量的时间
一种工业机械臂用便于更换的安装装置.pdf
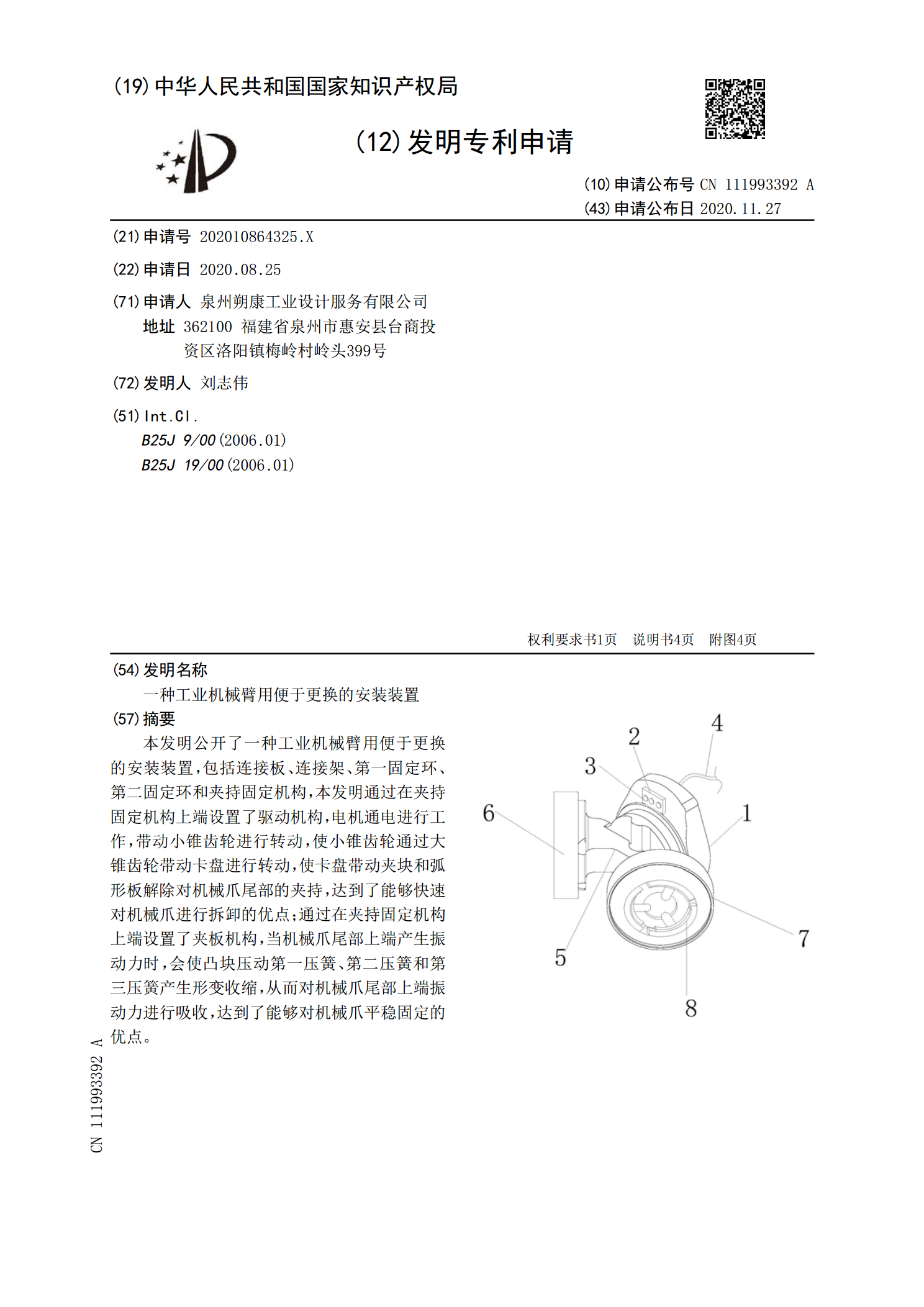
本发明公开了一种工业机械臂用便于更换的安装装置,包括连接板、连接架、第一固定环、第二固定环和夹持固定机构,本发明通过在夹持固定机构上端设置了驱动机构,电机通电进行工作,带动小锥齿轮进行转动,使小锥齿轮通过大锥齿轮带动卡盘进行转动,使卡盘带动夹块和弧形板解除对机械爪尾部的夹持,达到了能够快速对机械爪进行拆卸的优点;通过在夹持固定机构上端设置了夹板机构,当机械爪尾部上端产生振动力时,会使凸块压动第一压簧、第二压簧和第三压簧产生形变收缩,从而对机械爪尾部上端振动力进行吸收,达到了能够对机械爪平稳固定的优点。

一种便于安装的机床机械臂.pdf
本发明公开了一种便于安装的机床机械臂,包括底座,所述底座的顶端分别固定有固定板、挡板和两组支撑轴,所述支撑轴均位于固定板和挡板之间,所述支撑轴的顶端均转动连接有齿轮,两组所述齿轮相远离的一侧均设置有第一齿条,所述齿轮之间设置有两组第二齿条,所述齿轮均与第一齿条和第二齿条相啮合,所述第一齿条的两侧均固定有第一导向杆,其中一组所述第一导向杆贯穿固定板,另一组所述第一导向杆贯穿挡板并固定有第一夹板,所述第二齿条的两侧均固定有第二导向杆。本发明设计巧妙,结构合理,操作简单,方便对不同型号的安装座进行安装或者拆卸,
一种便于安装拆卸的机械臂底座.pdf
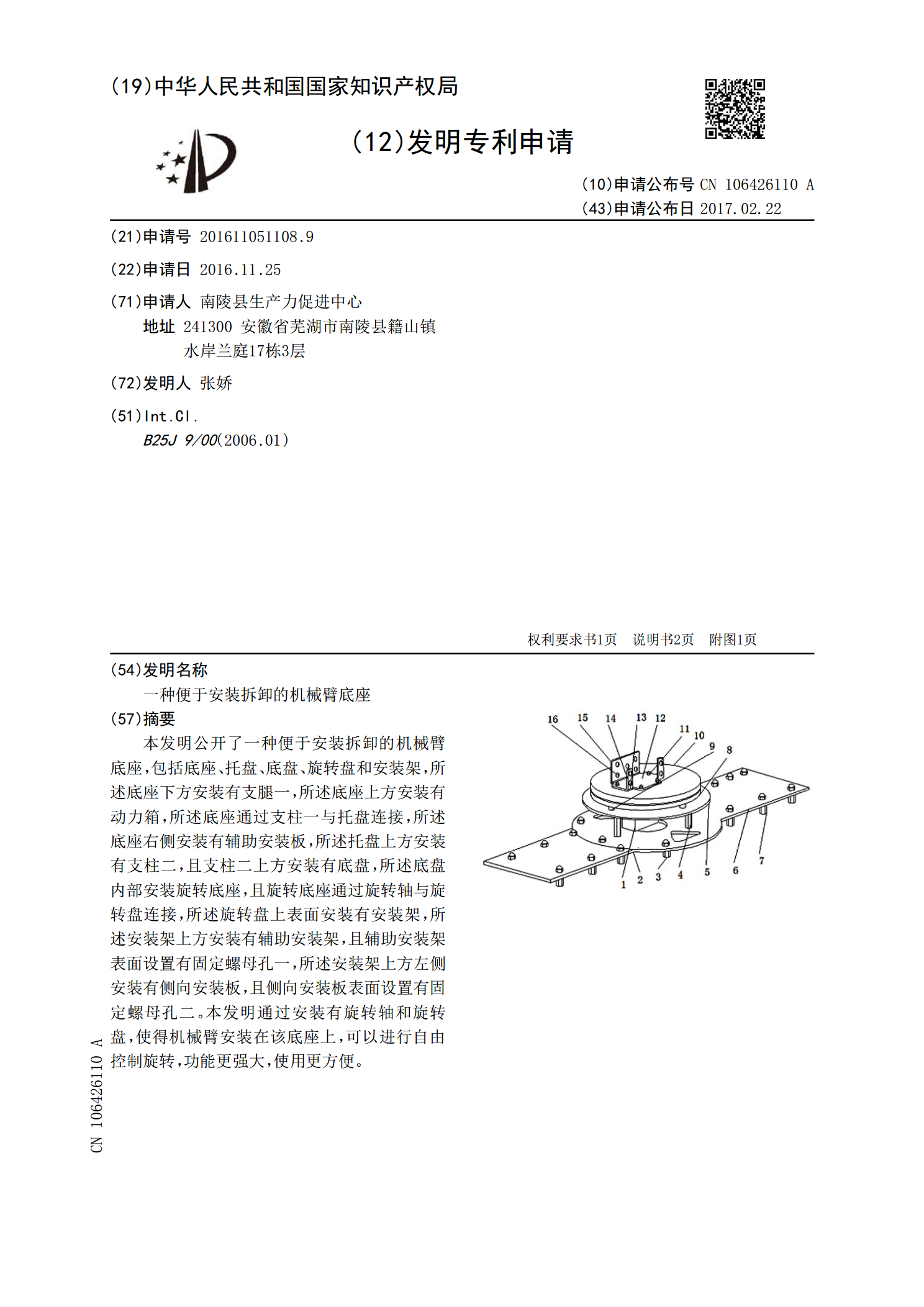
本发明公开了一种便于安装拆卸的机械臂底座,包括底座、托盘、底盘、旋转盘和安装架,所述底座下方安装有支腿一,所述底座上方安装有动力箱,所述底座通过支柱一与托盘连接,所述底座右侧安装有辅助安装板,所述托盘上方安装有支柱二,且支柱二上方安装有底盘,所述底盘内部安装旋转底座,且旋转底座通过旋转轴与旋转盘连接,所述旋转盘上表面安装有安装架,所述安装架上方安装有辅助安装架,且辅助安装架表面设置有固定螺母孔一,所述安装架上方左侧安装有侧向安装板,且侧向安装板表面设置有固定螺母孔二。本发明通过安装有旋转轴和旋转盘,使得机