
一种基于角度特征识别的移动装置位姿定位方法.pdf

努力****采萍

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于角度特征识别的移动装置位姿定位方法.pdf
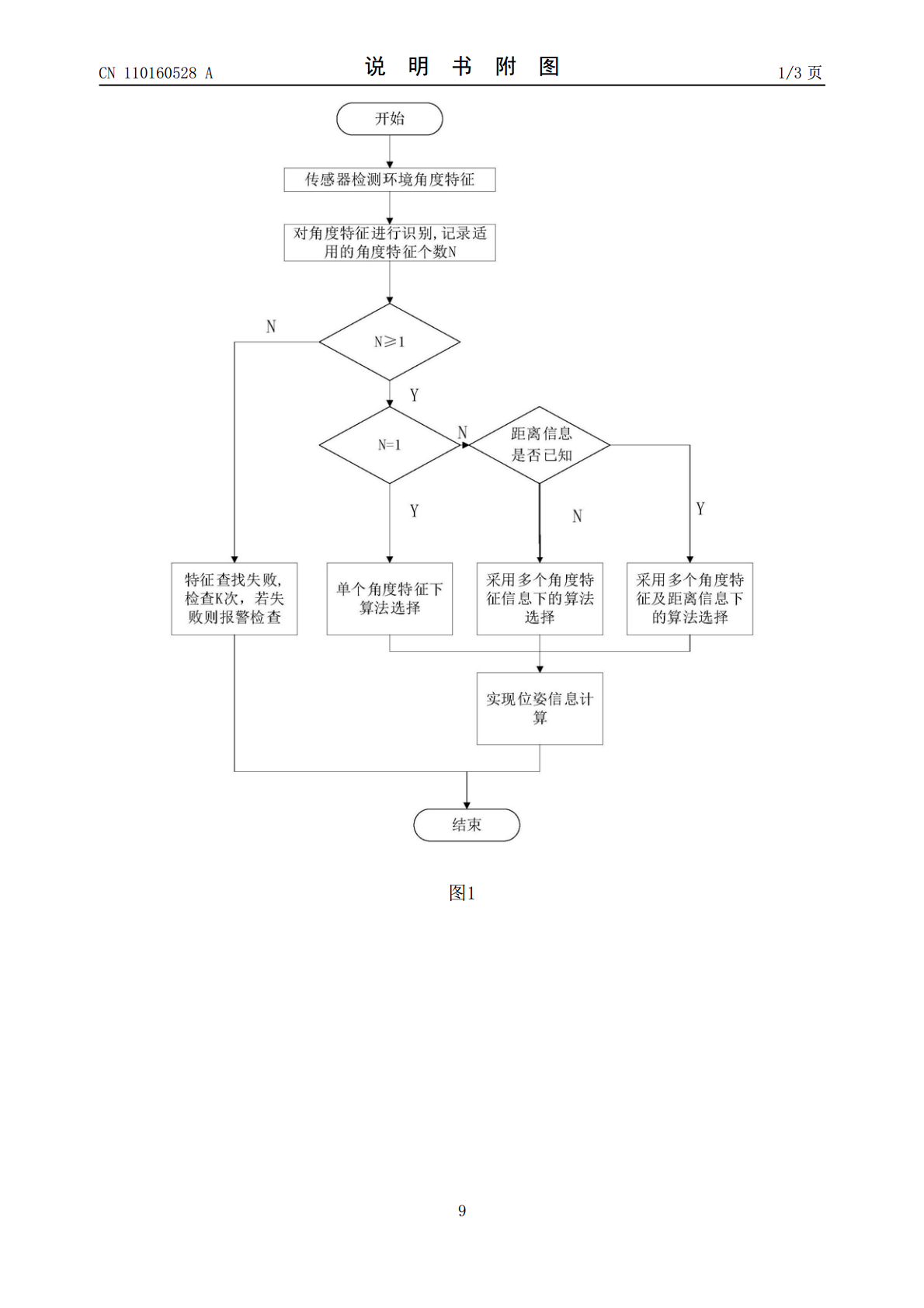
本发明属于移动对象的定位导航相关技术领域,并公开了一种基于角度特征识别的移动装置位姿定位方法,包括:直接采用固设在移动装置上的车载传感器实时采集周围的环境信息,并得到反映环境信息的多个轮廓离散点;对离散点进行排序,得到对应的有序坐标点集合,并采用差分求导进行比较的方式来判定是否出现了角度特征;使用记录的角度特征,将其与标准环境地图中所存储的参考角度特征进行匹配,由此得到移动装置相对于标准环境地图的位置方向数据。通过本发明,可在无需对周围环境进行特殊改造且不使用大量专门辅助工具的条件下,即可执行多种工况下的
一种基于轮廓提取点对特征的位姿估计方法.pdf
本发明涉及涉及无序抓取识别的技术领域,更具体地,涉及一种基于轮廓提取点对特征的位姿估计方法,包括两个阶段:离线建模阶段和在线识别阶段,离线建模阶段,对模板进行轮廓提取,再进行特征提取,并储存在哈希表;在线识别阶段,对场景进行轮廓提取,再进行特征提取,和离线建模保存在哈希表中的特征建立点对特征,然后进行位姿投票,再通过ICP迭代处理,完成位姿估计,本实施例中,对模板和场景均进行轮廓提取,用轮廓替代原来的模板和场景点云进行点对特征匹配,耗时短,且提高了匹配精度和正确率。

基于特征点对的位姿估计方法研究的综述报告.docx
基于特征点对的位姿估计方法研究的综述报告特征点对是计算机视觉中广泛使用的一种简单而有效的方法,用于位姿估计、目标检测、匹配等领域。在本篇综述中,我们将主要探讨基于特征点对的位姿估计方法的研究进展和应用。一、特征点对的定义和分类特征点对是指从图像中提取出来的具有独特性质和描述性特征的图像点对,通常被用于描述图像中的目标物体。常见的特征点对包括图像中的角点、边缘、斑块等。特征点对的分类可以按照特征点的类别、选择和匹配的方式等多种角度进行。按照特征点的类别来看,可分为SIFT、SURF、ORB等几种类型。按照选
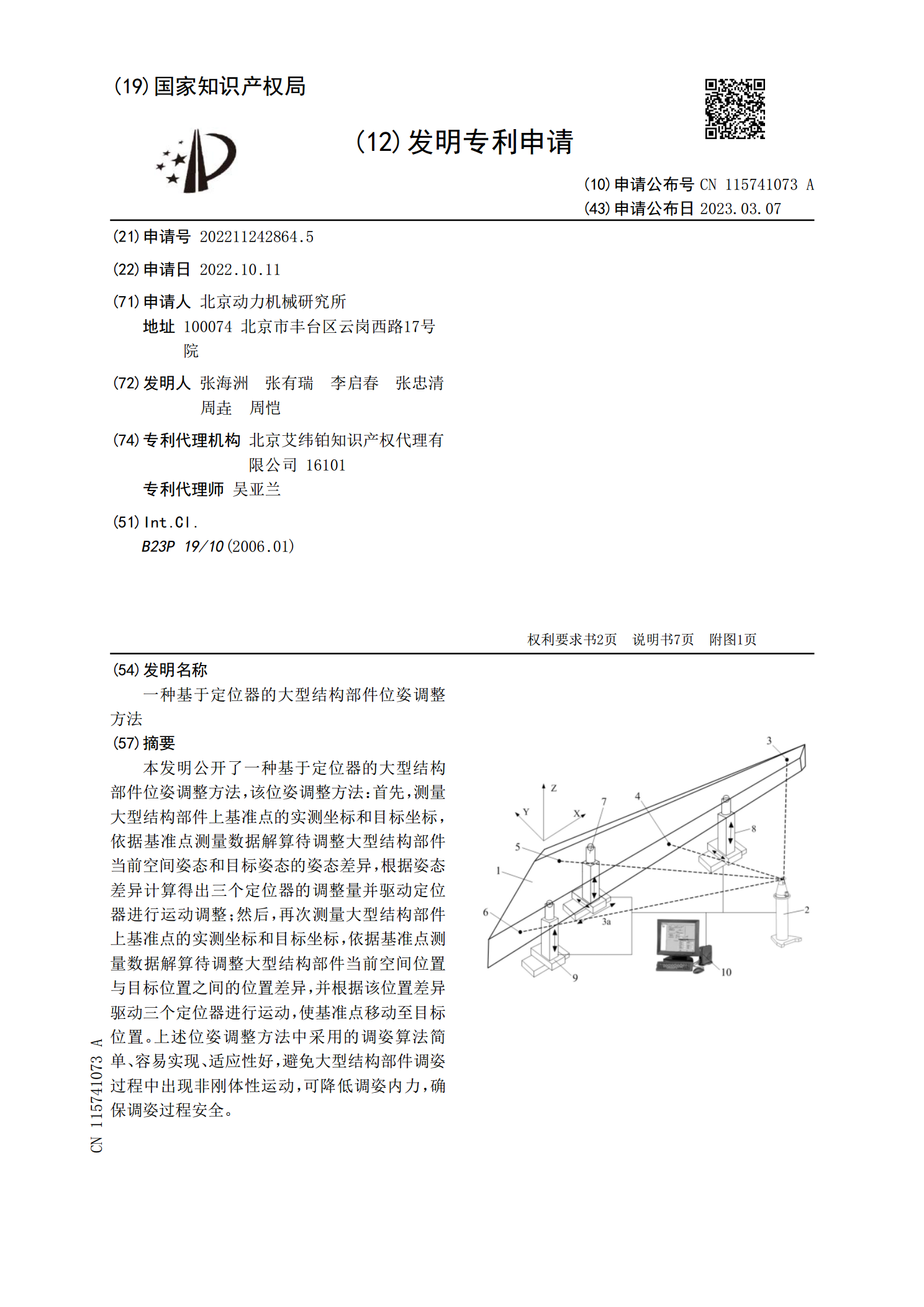
一种基于定位器的大型结构部件位姿调整方法.pdf
本发明公开了一种基于定位器的大型结构部件位姿调整方法,该位姿调整方法:首先,测量大型结构部件上基准点的实测坐标和目标坐标,依据基准点测量数据解算待调整大型结构部件当前空间姿态和目标姿态的姿态差异,根据姿态差异计算得出三个定位器的调整量并驱动定位器进行运动调整;然后,再次测量大型结构部件上基准点的实测坐标和目标坐标,依据基准点测量数据解算待调整大型结构部件当前空间位置与目标位置之间的位置差异,并根据该位置差异驱动三个定位器进行运动,使基准点移动至目标位置。上述位姿调整方法中采用的调姿算法简单、容易实现、适应
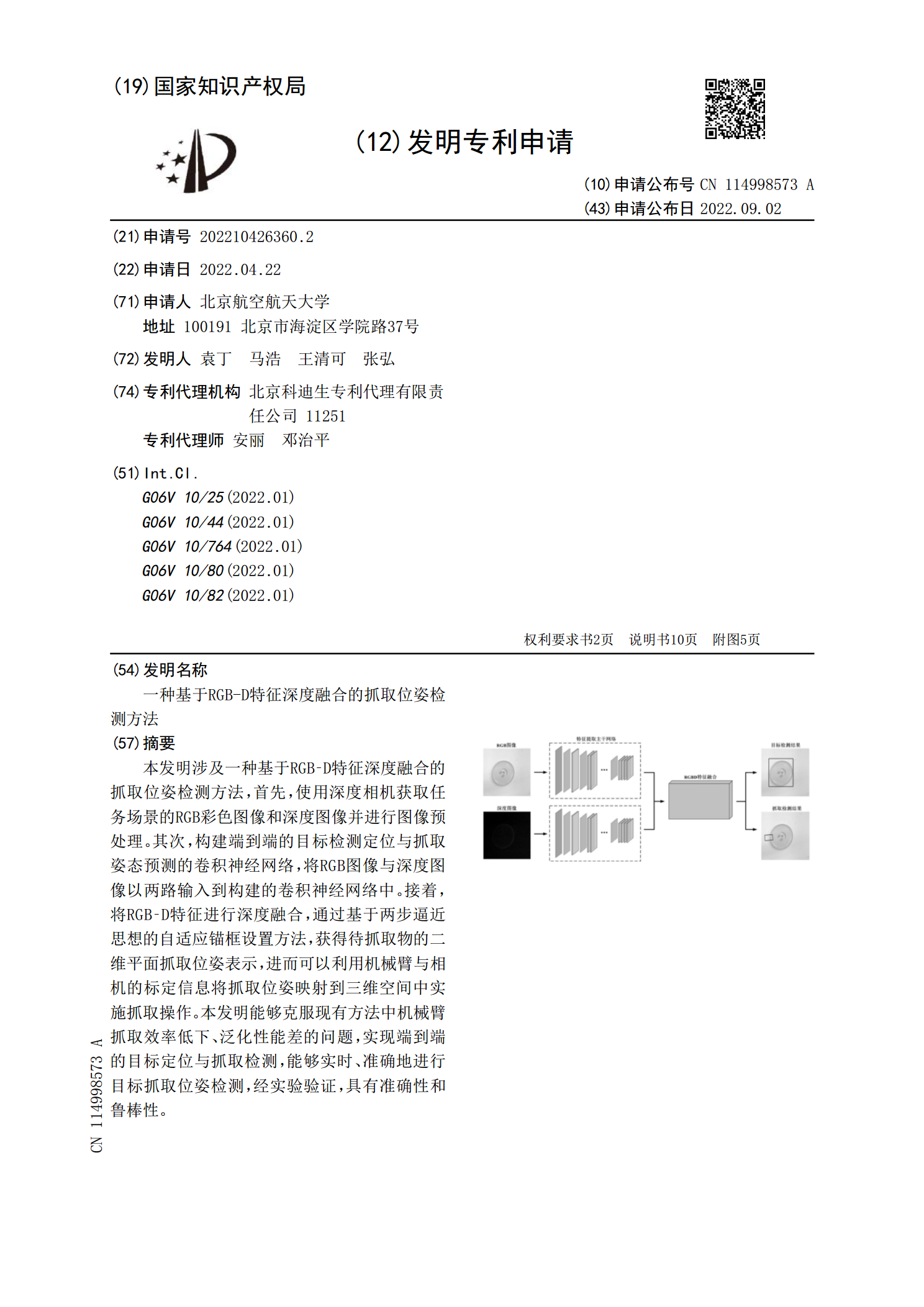
一种基于RGB-D特征深度融合的抓取位姿检测方法.pdf
本发明涉及一种基于RGB‑D特征深度融合的抓取位姿检测方法,首先,使用深度相机获取任务场景的RGB彩色图像和深度图像并进行图像预处理。其次,构建端到端的目标检测定位与抓取姿态预测的卷积神经网络,将RGB图像与深度图像以两路输入到构建的卷积神经网络中。接着,将RGB‑D特征进行深度融合,通过基于两步逼近思想的自适应锚框设置方法,获得待抓取物的二维平面抓取位姿表示,进而可以利用机械臂与相机的标定信息将抓取位姿映射到三维空间中实施抓取操作。本发明能够克服现有方法中机械臂抓取效率低下、泛化性能差的问题,实现端到端