
基于特征点对的位姿估计方法研究的综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于特征点对的位姿估计方法研究的综述报告.docx
基于特征点对的位姿估计方法研究的综述报告特征点对是计算机视觉中广泛使用的一种简单而有效的方法,用于位姿估计、目标检测、匹配等领域。在本篇综述中,我们将主要探讨基于特征点对的位姿估计方法的研究进展和应用。一、特征点对的定义和分类特征点对是指从图像中提取出来的具有独特性质和描述性特征的图像点对,通常被用于描述图像中的目标物体。常见的特征点对包括图像中的角点、边缘、斑块等。特征点对的分类可以按照特征点的类别、选择和匹配的方式等多种角度进行。按照特征点的类别来看,可分为SIFT、SURF、ORB等几种类型。按照选

基于EIV模型的点线位姿估计研究的综述报告.docx
基于EIV模型的点线位姿估计研究的综述报告随着计算机视觉技术的不断发展,点线位姿估计在工业、机器人、军事领域等方面得到了广泛的应用。点线位姿估计是指在二维或三维空间中通过检测点、线等基本几何元素,估计目标物体的姿态信息。在工业中,点线位姿估计被广泛应用于计算机视觉导航、自适应机器人等领域。在军事领域中,点线位姿估计被用于目标检测、目标跟踪等方面。在本综述报告中,将针对基于EIV模型的点线位姿估计研究进行分析和总结。1.EIV模型的基本理论EIV(Errors-In-Variables)模型是指在估计过程中
一种基于轮廓提取点对特征的位姿估计方法.pdf
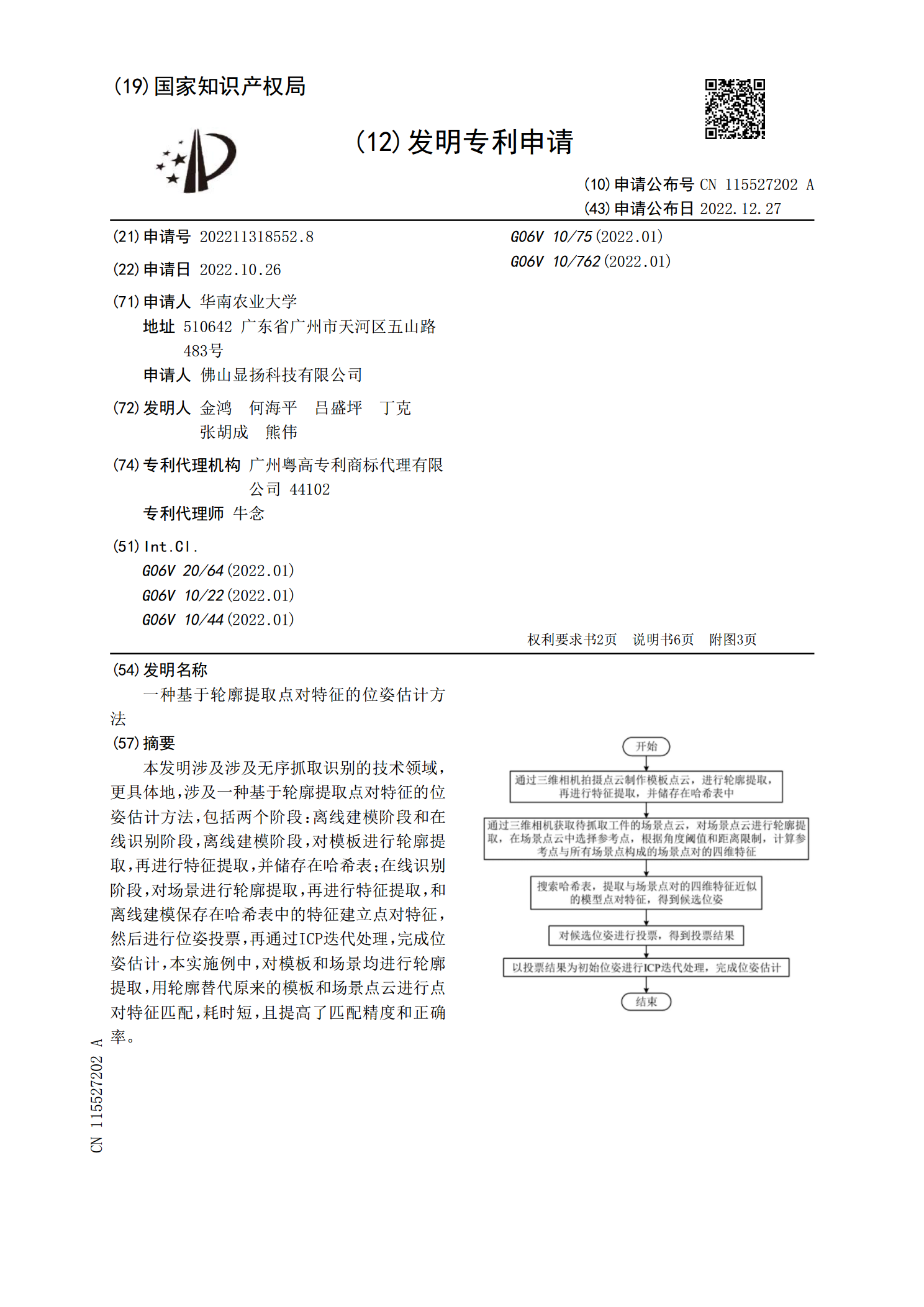
本发明涉及涉及无序抓取识别的技术领域,更具体地,涉及一种基于轮廓提取点对特征的位姿估计方法,包括两个阶段:离线建模阶段和在线识别阶段,离线建模阶段,对模板进行轮廓提取,再进行特征提取,并储存在哈希表;在线识别阶段,对场景进行轮廓提取,再进行特征提取,和离线建模保存在哈希表中的特征建立点对特征,然后进行位姿投票,再通过ICP迭代处理,完成位姿估计,本实施例中,对模板和场景均进行轮廓提取,用轮廓替代原来的模板和场景点云进行点对特征匹配,耗时短,且提高了匹配精度和正确率。

基于位姿参数估计的多视角点云配准方法.docx
基于位姿参数估计的多视角点云配准方法1.内容概要本文提出了一种基于位姿参数估计的多视角点云配准方法,旨在解决多视角图像在三维重建过程中可能出现的位姿一致性问题。该方法首先根据输入的多视角点云数据和相机标定信息,估计出每个相机的位姿参数。通过最小二乘法计算各个相机之间的位姿误差,并利用RANSAC算法去除异常值。根据得到的位姿参数对点云数据进行配准,从而实现多视角点云数据的融合。实验结果表明,该方法在处理具有不同姿态和尺度的多视角点云数据时具有较好的性能。1.1研究背景随着计算机视觉、机器人技术和虚拟现实等

基于改进CVFH和CRH特征的随机堆放活塞位姿估计方法.pdf
基于改进CVFH和CRH特征的随机堆放活塞位姿估计方法,包括离线处理以及在线识别:离线处理先通过对Kinect进行离线标定,之后通过活塞的CAD模型自动渲染生成多视角点云,计算其点云特征,最后通过对点云和特征进行索引生成离线模板库;在线识别是对随机堆放的活塞进行位姿估计,首先使用标定好的Kinect对活塞点云进行采集和矫正,然后对点云进行预处理和分割,对于分割后的点云,计算其点云特征并与模板库进行初始配准,之后以该位姿为初值,通过ICP算法对点云进行精确配准,得到点云的精确位姿,对于生成的精确位姿,通过假