
一种基于定位器的大型结构部件位姿调整方法.pdf

宛菡****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于定位器的大型结构部件位姿调整方法.pdf
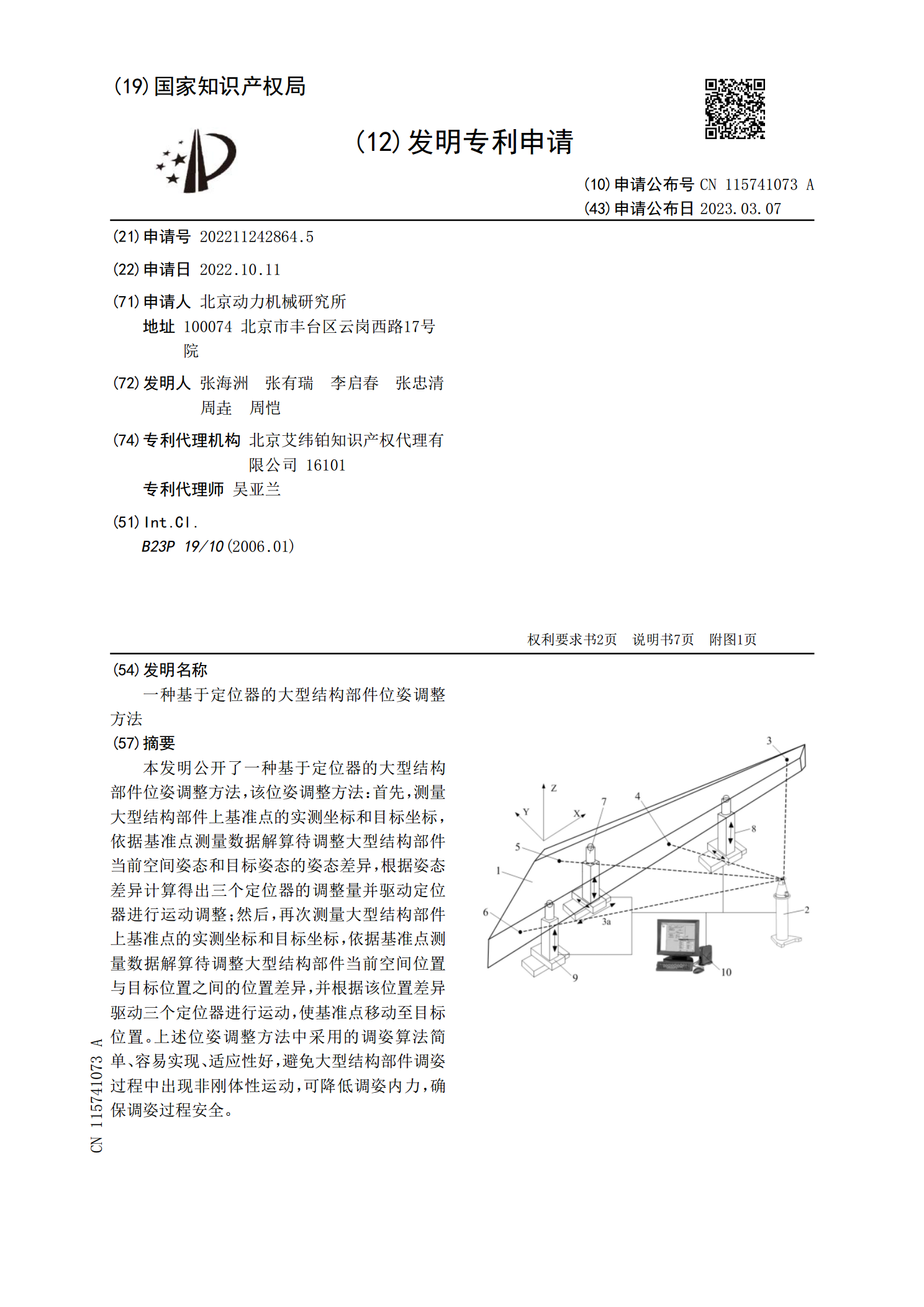
本发明公开了一种基于定位器的大型结构部件位姿调整方法,该位姿调整方法:首先,测量大型结构部件上基准点的实测坐标和目标坐标,依据基准点测量数据解算待调整大型结构部件当前空间姿态和目标姿态的姿态差异,根据姿态差异计算得出三个定位器的调整量并驱动定位器进行运动调整;然后,再次测量大型结构部件上基准点的实测坐标和目标坐标,依据基准点测量数据解算待调整大型结构部件当前空间位置与目标位置之间的位置差异,并根据该位置差异驱动三个定位器进行运动,使基准点移动至目标位置。上述位姿调整方法中采用的调姿算法简单、容易实现、适应

异面部件接头交点孔精加工的位姿调整系统及调整方法.pdf
本发明异面部件接头交点孔精加工的位姿调整系统,包括待调姿部件、定位调整支撑工装,所述的定位调整支撑工装包括型架体、基本交点定位器、测量点检测装置和调姿机构,所述的基本交点定位器设置在型架体上,所述的型架体设置有若干所述的测量点检测装置和多个所述的调姿机构,所述的待调姿部件置于所述的调姿机构上,所述的测量点检测装置布置在待调姿部件下表面的水平测量点理论位置,还包括根据测量点检测装置测量的实测点实际坐标值参数来计算出各调姿机构的调整量的柔性并联调控系统。本发明位姿调整方法有五个步骤,解决了原有位姿调整方法的随

基于容差约束的飞机部件位姿评价方法研究的开题报告.docx
基于容差约束的飞机部件位姿评价方法研究的开题报告一.研究背景及意义随着航空业的不断发展,航空器件的要求也越来越高,其中包括对于飞机部件精度的要求。而精度评价则是对于零部件的位姿偏差、跳动、尺寸等进行量化分析的工作。目前,对于零部件位姿评价的方法,主要采用的是传统的集中式评定方法,即将工件的尺寸、形状、位置等参数与理论值进行比较,此方法评价结果精度高,但对于机械加工制造非常依赖专业技术,且在实际生产中需要大量人力和时间。因此,如何快速精准评价零部件的位姿缺陷成为了一个研究的重点和难点。本研究主要针对传统集中
基于位姿图调整的建图方法及相关设备.pdf
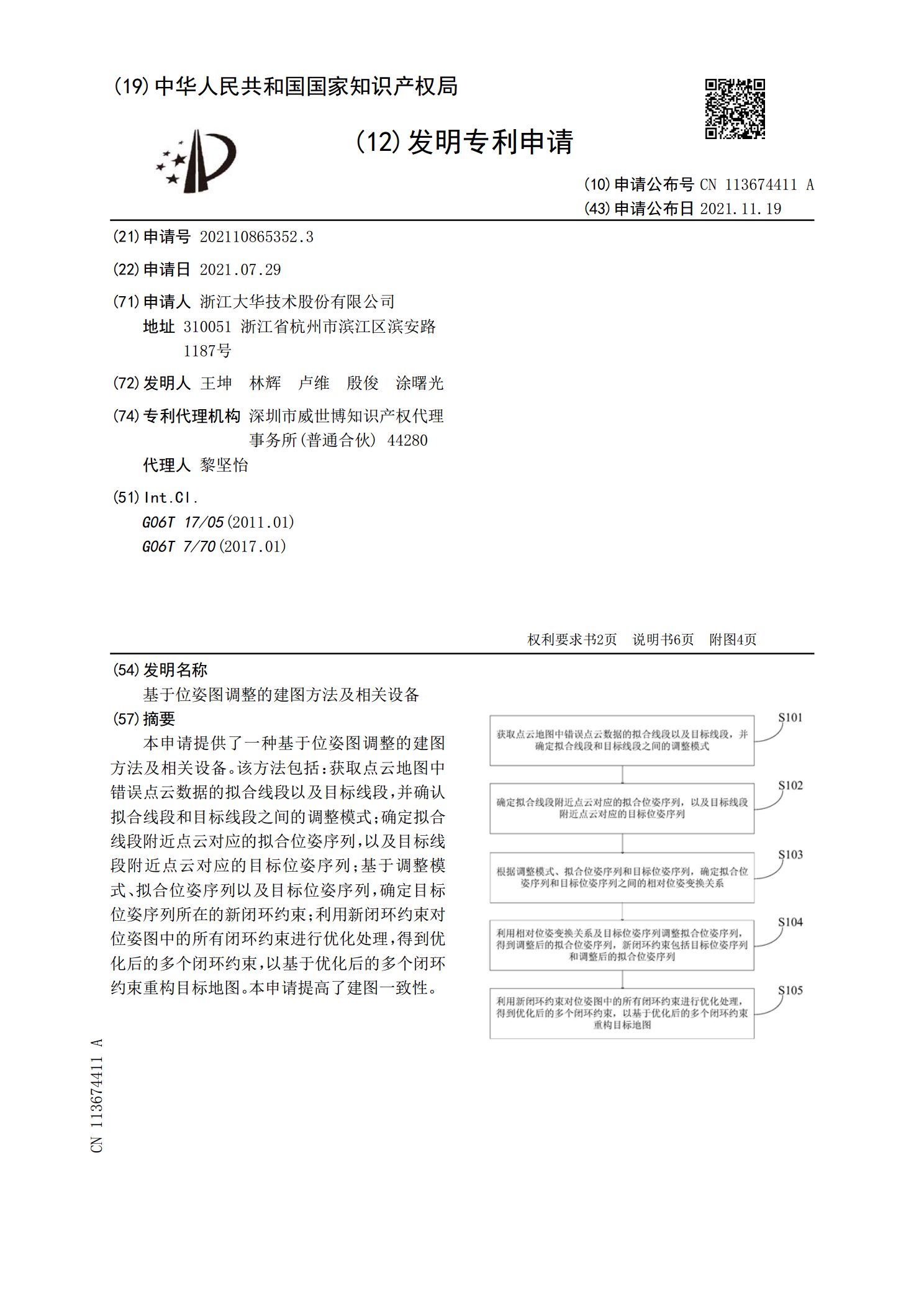
本申请提供了一种基于位姿图调整的建图方法及相关设备。该方法包括:获取点云地图中错误点云数据的拟合线段以及目标线段,并确认拟合线段和目标线段之间的调整模式;确定拟合线段附近点云对应的拟合位姿序列,以及目标线段附近点云对应的目标位姿序列;基于调整模式、拟合位姿序列以及目标位姿序列,确定目标位姿序列所在的新闭环约束;利用新闭环约束对位姿图中的所有闭环约束进行优化处理,得到优化后的多个闭环约束,以基于优化后的多个闭环约束重构目标地图。本申请提高了建图一致性。
一种基于视觉的机器人位姿调整装置及方法.pdf
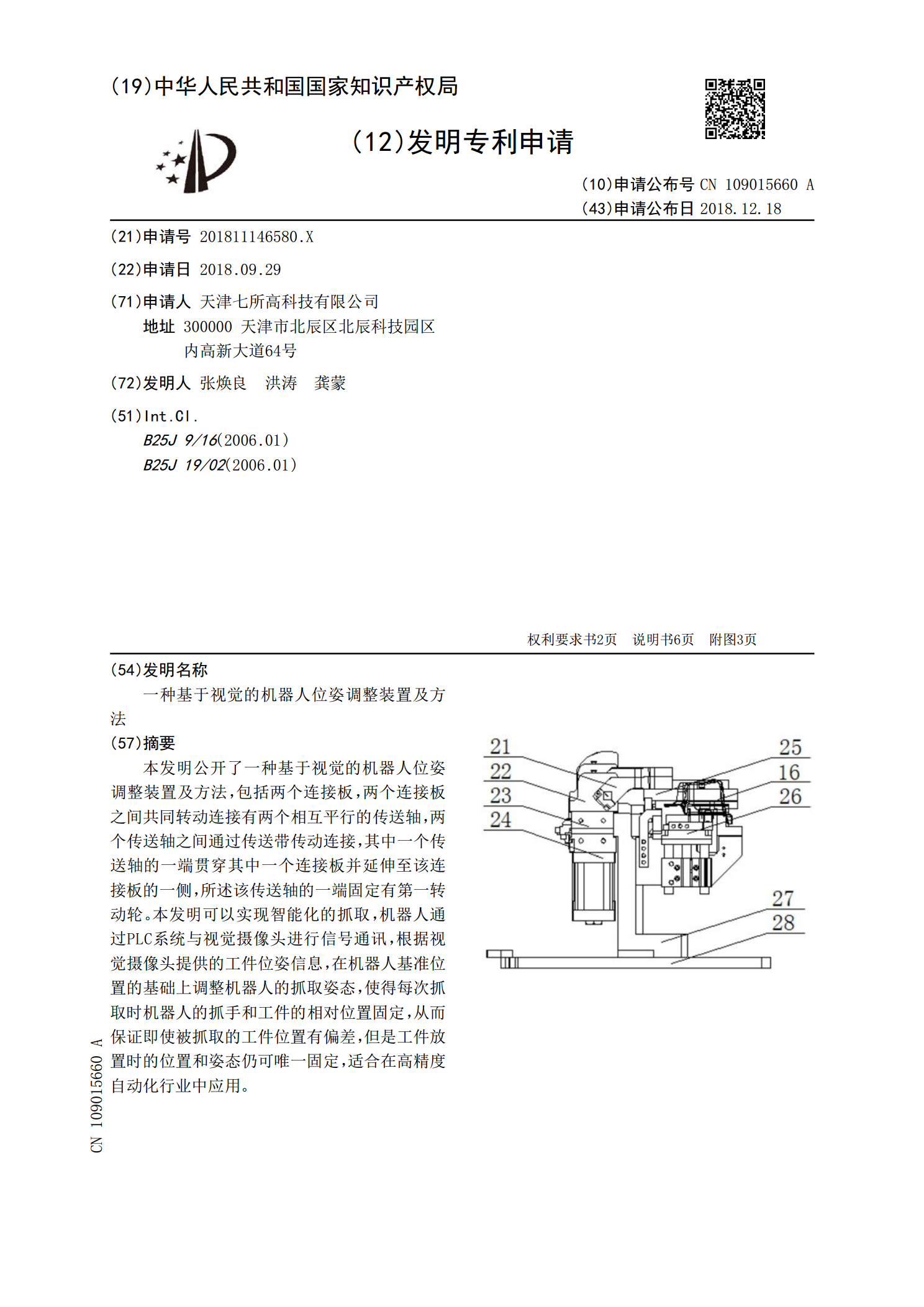
本发明公开了一种基于视觉的机器人位姿调整装置及方法,包括两个连接板,两个连接板之间共同转动连接有两个相互平行的传送轴,两个传送轴之间通过传送带传动连接,其中一个传送轴的一端贯穿其中一个连接板并延伸至该连接板的一侧,所述该传送轴的一端固定有第一转动轮。本发明可以实现智能化的抓取,机器人通过PLC系统与视觉摄像头进行信号通讯,根据视觉摄像头提供的工件位姿信息,在机器人基准位置的基础上调整机器人的抓取姿态,使得每次抓取时机器人的抓手和工件的相对位置固定,从而保证即使被抓取的工件位置有偏差,但是工件放置时的位置和