
一种主动式支撑避障装置、爬楼机器人及其爬楼方法.pdf

大渊****公主

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种主动式支撑避障装置、爬楼机器人及其爬楼方法.pdf
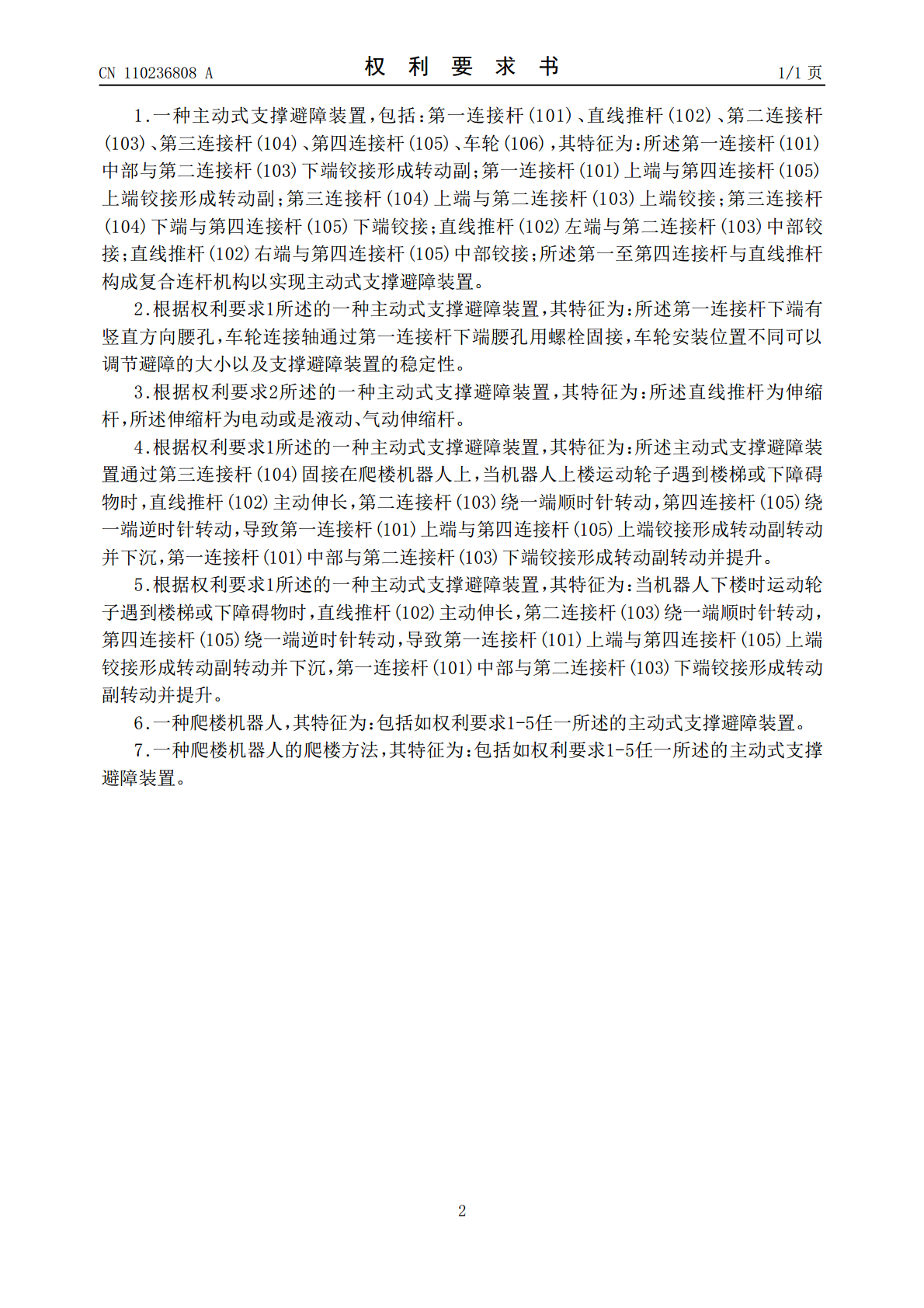
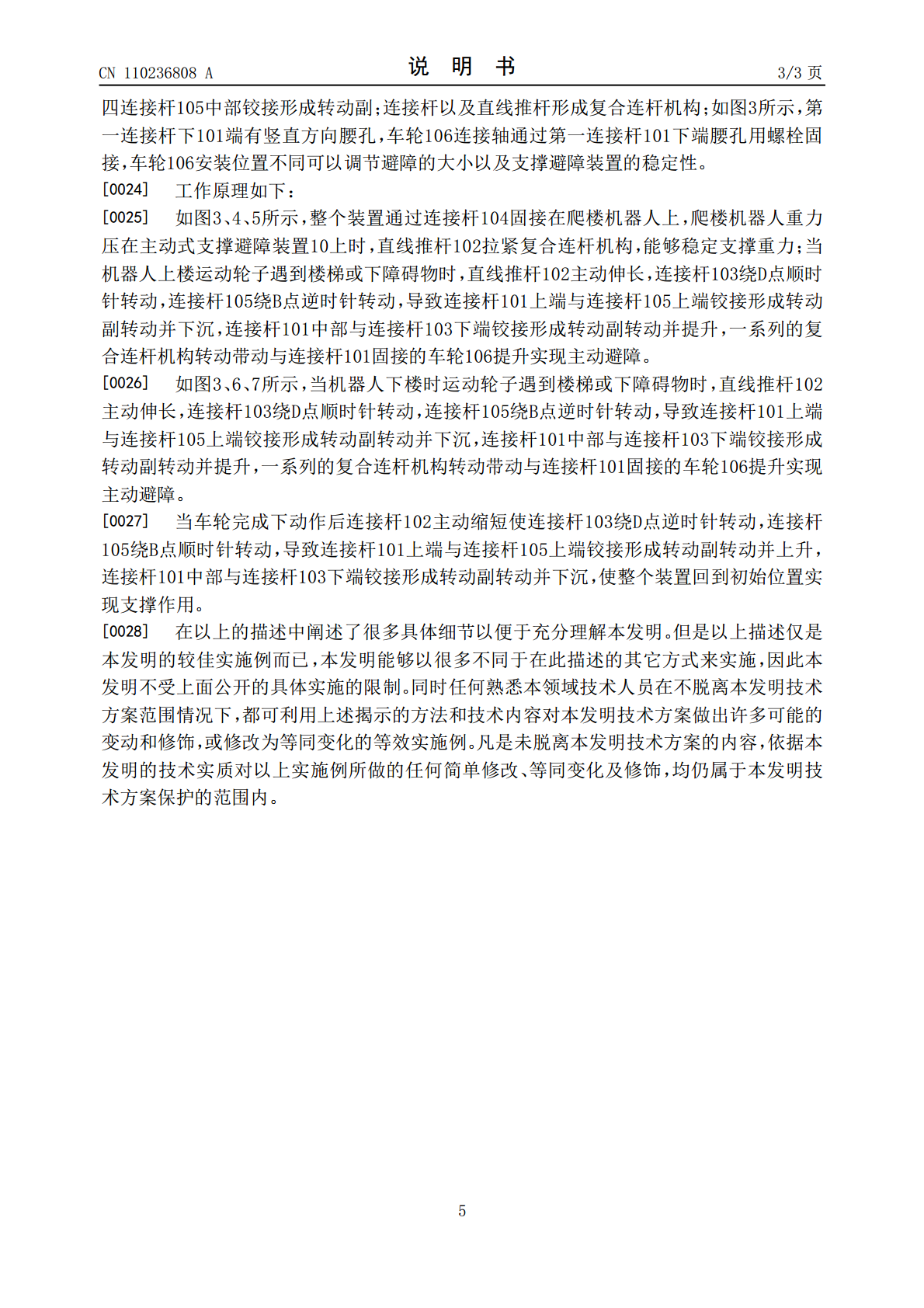
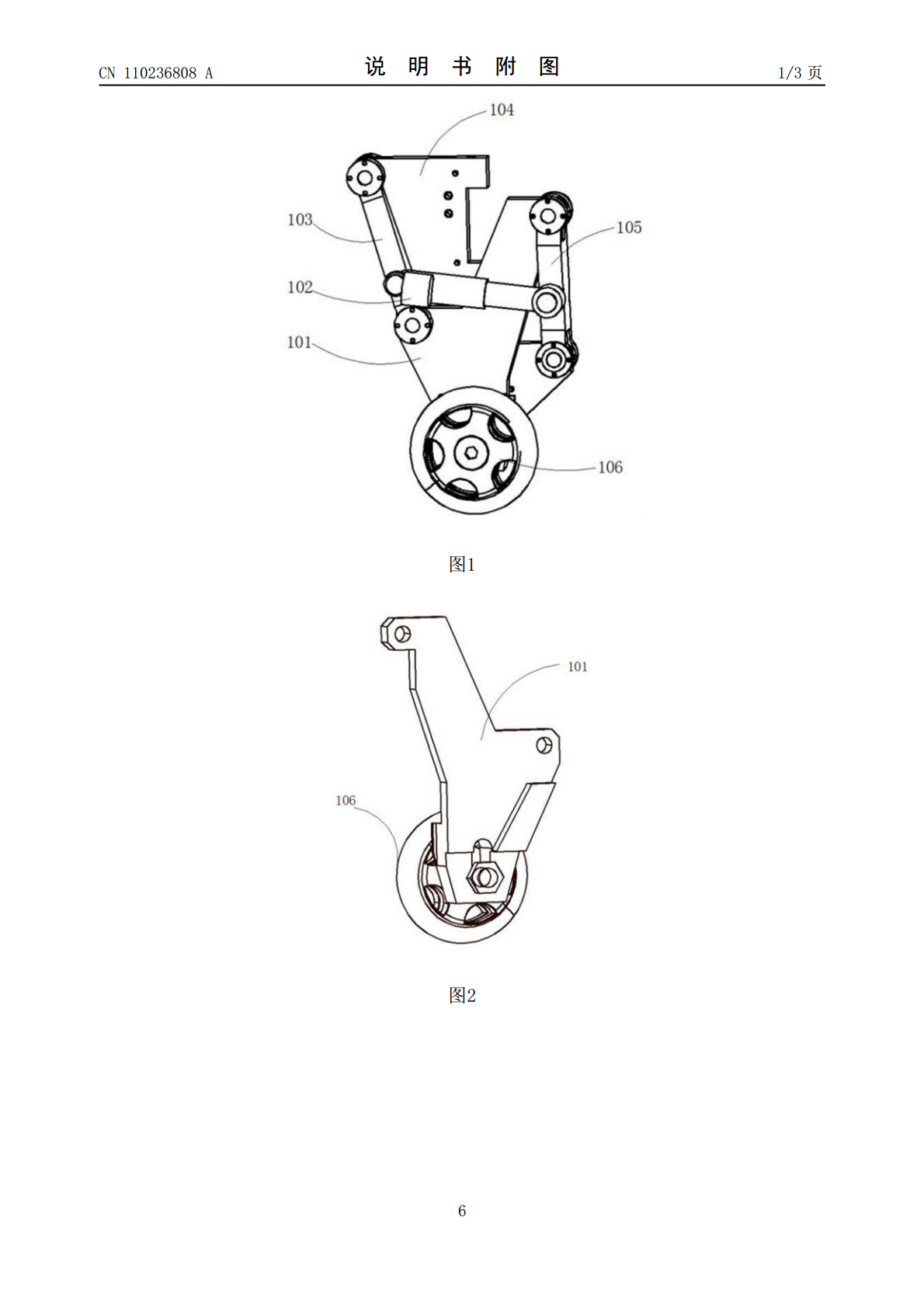
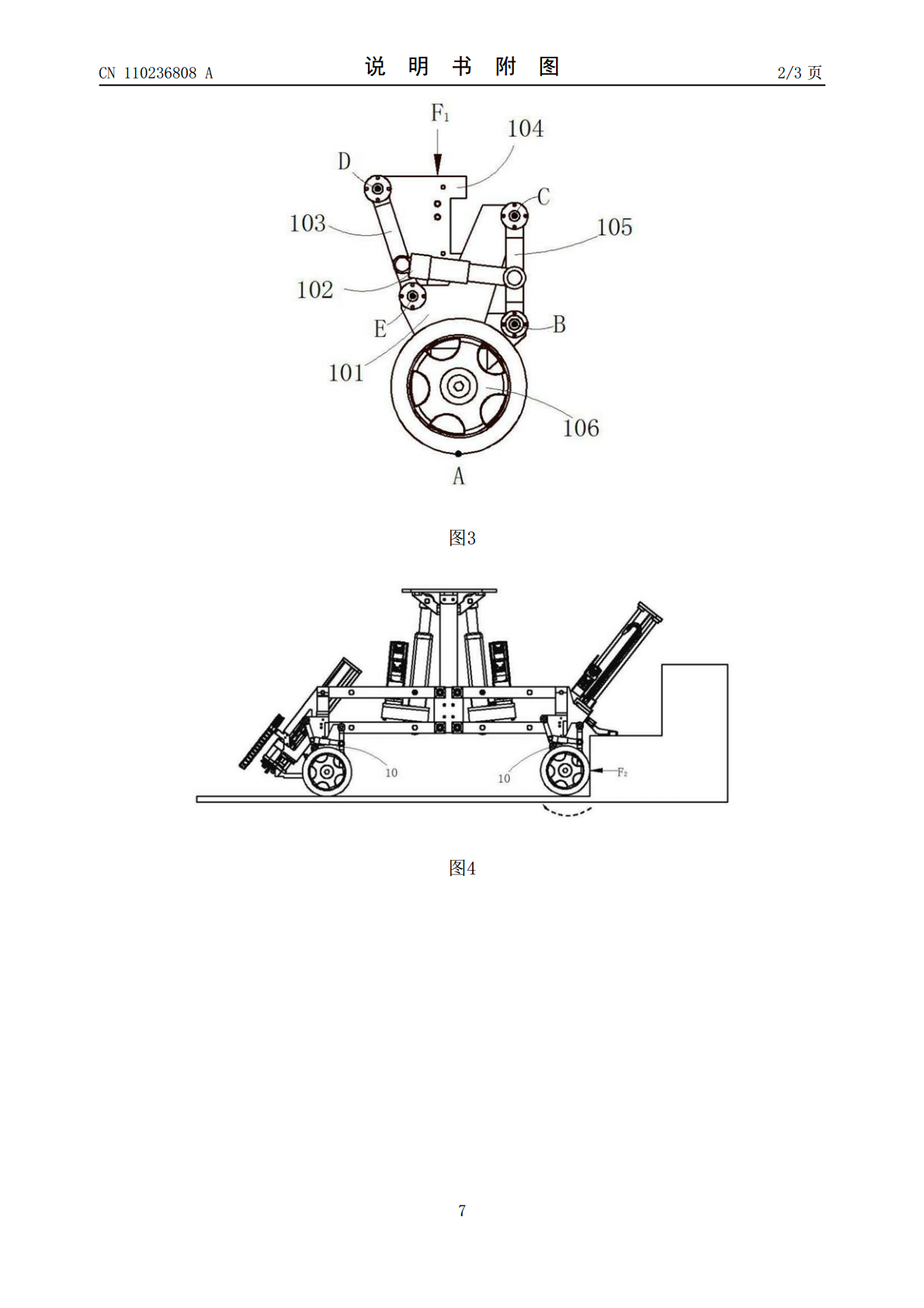
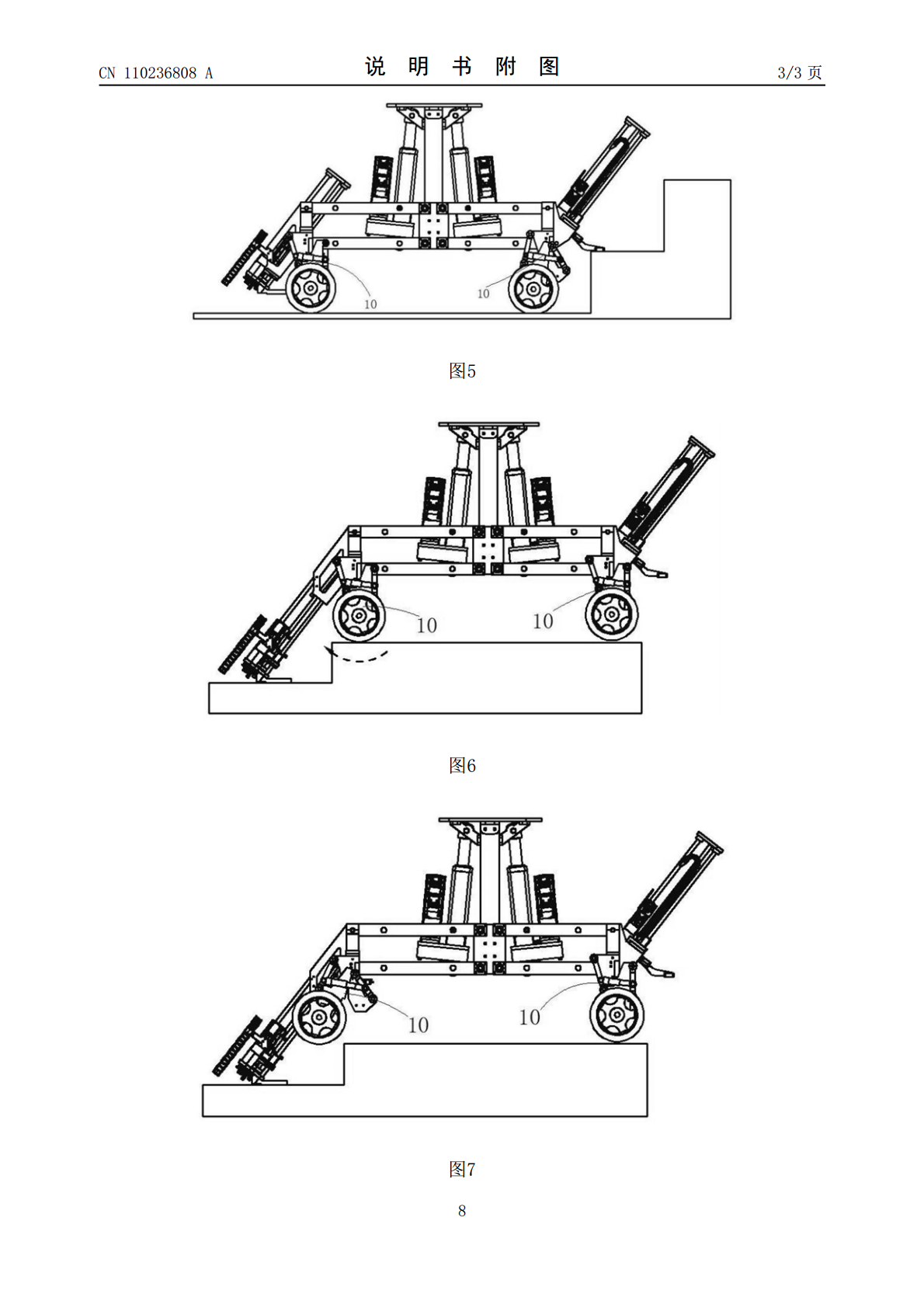
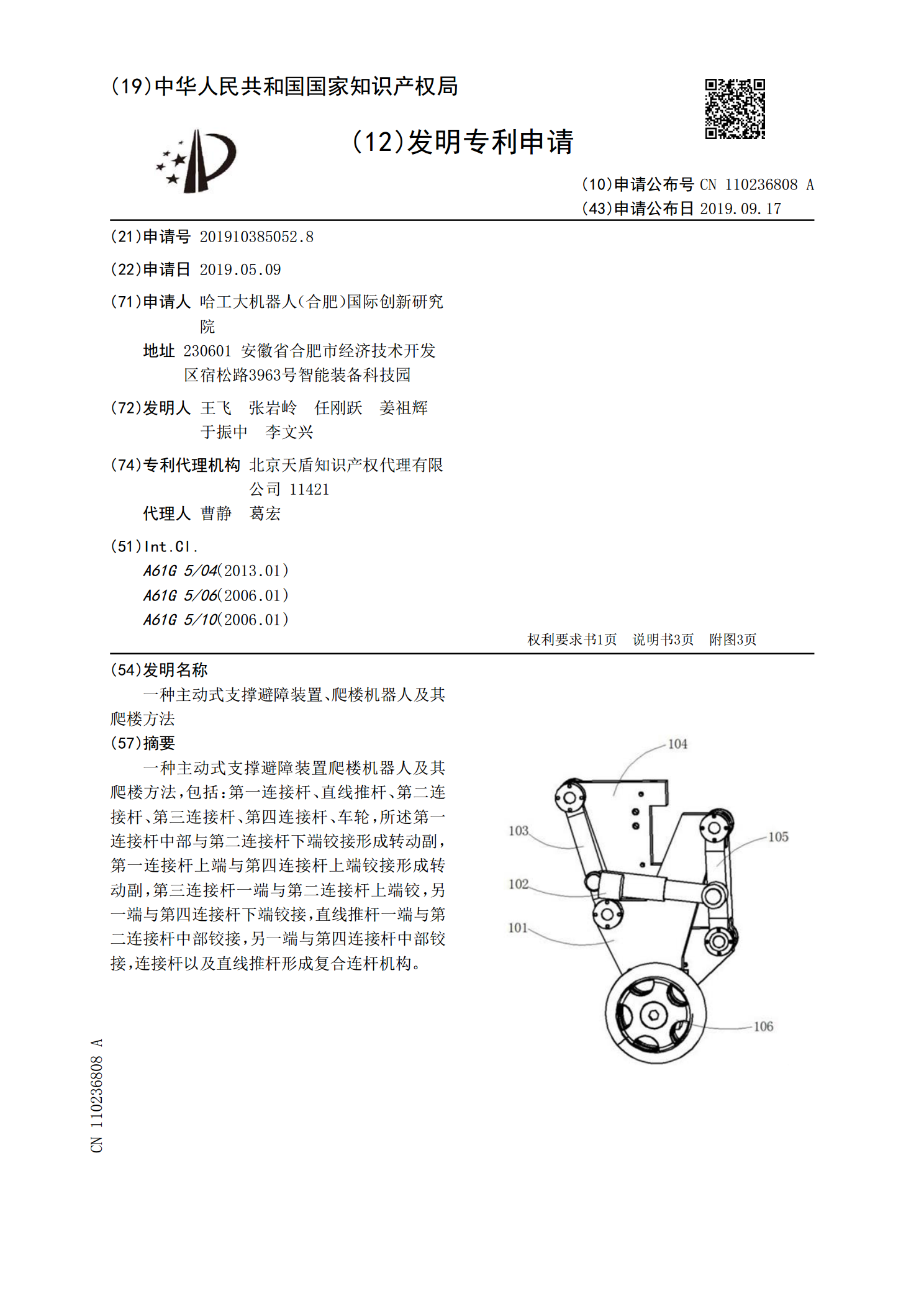
一种主动式支撑避障装置爬楼机器人及其爬楼方法,包括:第一连接杆、直线推杆、第二连接杆、第三连接杆、第四连接杆、车轮,所述第一连接杆中部与第二连接杆下端铰接形成转动副,第一连接杆上端与第四连接杆上端铰接形成转动副,第三连接杆一端与第二连接杆上端铰,另一端与第四连接杆下端铰接,直线推杆一端与第二连接杆中部铰接,另一端与第四连接杆中部铰接,连接杆以及直线推杆形成复合连杆机构。
一种被动式支撑避障装置、爬楼机器人及其爬楼方法.pdf
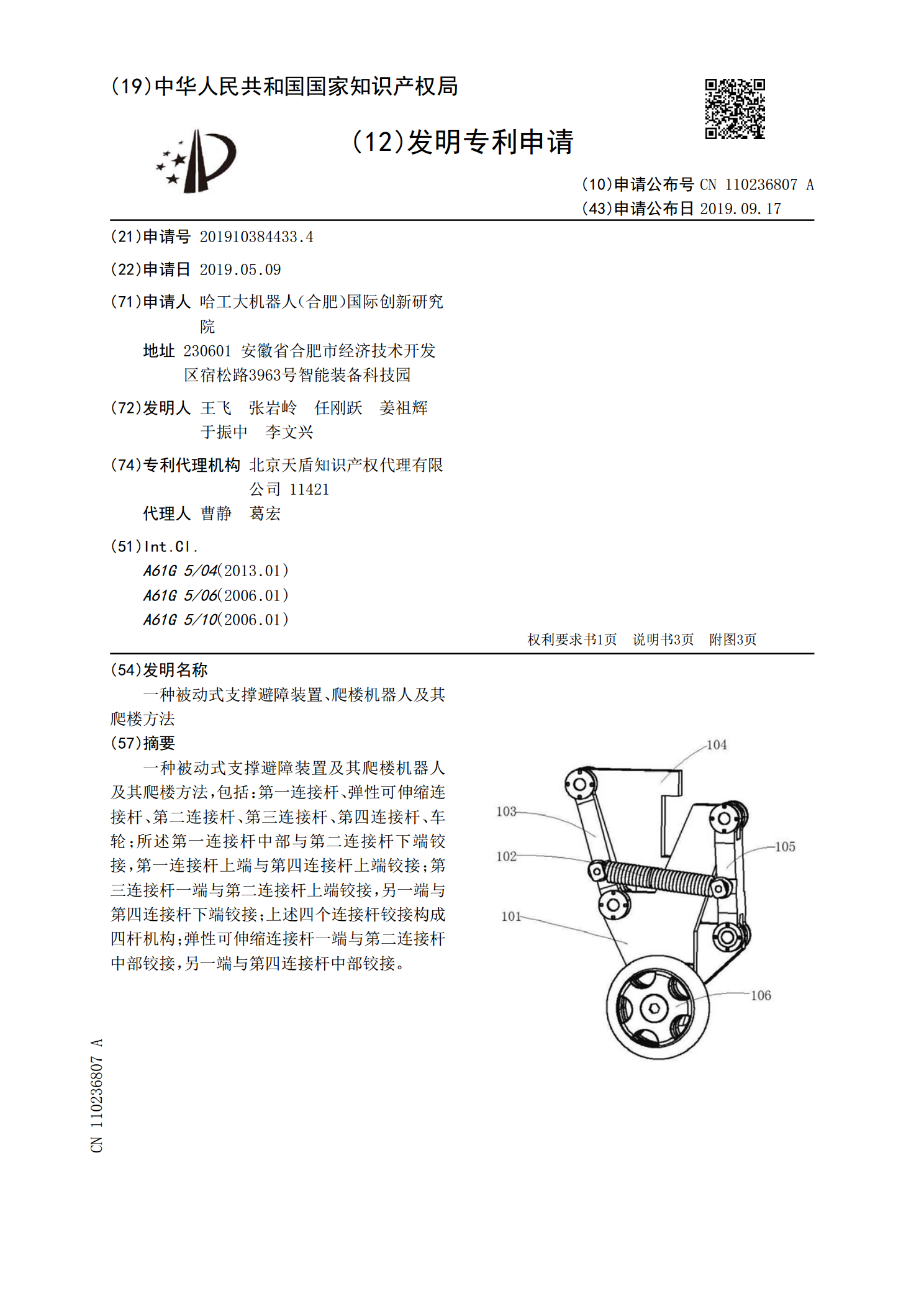
一种被动式支撑避障装置及其爬楼机器人及其爬楼方法,包括:第一连接杆、弹性可伸缩连接杆、第二连接杆、第三连接杆、第四连接杆、车轮;所述第一连接杆中部与第二连接杆下端铰接,第一连接杆上端与第四连接杆上端铰接;第三连接杆一端与第二连接杆上端铰接,另一端与第四连接杆下端铰接;上述四个连接杆铰接构成四杆机构;弹性可伸缩连接杆一端与第二连接杆中部铰接,另一端与第四连接杆中部铰接。

一种攀爬装置、爬楼机器人及其爬楼方法.pdf
一种攀爬装置及其爬楼机器人,包括爬爪、下移动板、直线轴承、连接固定板、导杆、丝杆、上移动板、电机、减速器、同步带、同步带轮111A、同步带轮111B、涨紧轮、缓冲器、接近开关;所述下移动板与上移动板通过导杆相连,导杆一端与下移动板固接,另一端与上移动板固定形成稳定框架结构,所述爬爪与下移动板固接;所述连接固定板通过直线轴承套在导杆上形成移动副;所述丝杆上端与上移动板连接形成转动副;所述丝杆下端与下移动板连接形成转动副,丝杆中部与连接固定板螺纹连接形成转动副。
一种爬楼装置及其爬楼方法.pdf
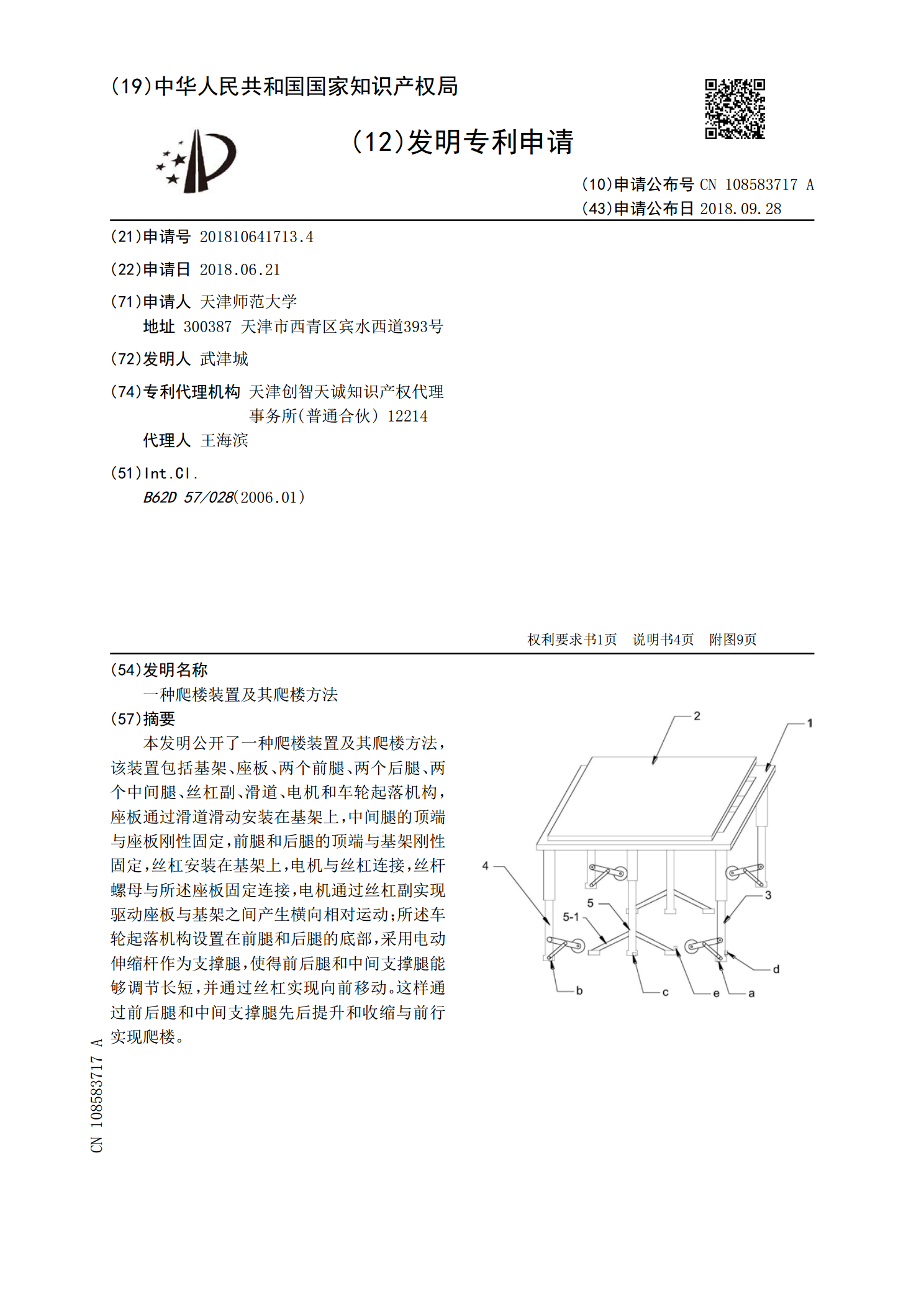
本发明公开了一种爬楼装置及其爬楼方法,该装置包括基架、座板、两个前腿、两个后腿、两个中间腿、丝杠副、滑道、电机和车轮起落机构,座板通过滑道滑动安装在基架上,中间腿的顶端与座板刚性固定,前腿和后腿的顶端与基架刚性固定,丝杠安装在基架上,电机与丝杠连接,丝杆螺母与所述座板固定连接,电机通过丝杠副实现驱动座板与基架之间产生横向相对运动;所述车轮起落机构设置在前腿和后腿的底部,采用电动伸缩杆作为支撑腿,使得前后腿和中间支撑腿能够调节长短,并通过丝杠实现向前移动。这样通过前后腿和中间支撑腿先后提升和收缩与前行实现爬
一种双层履带式载物爬楼装置及爬楼方法.pdf
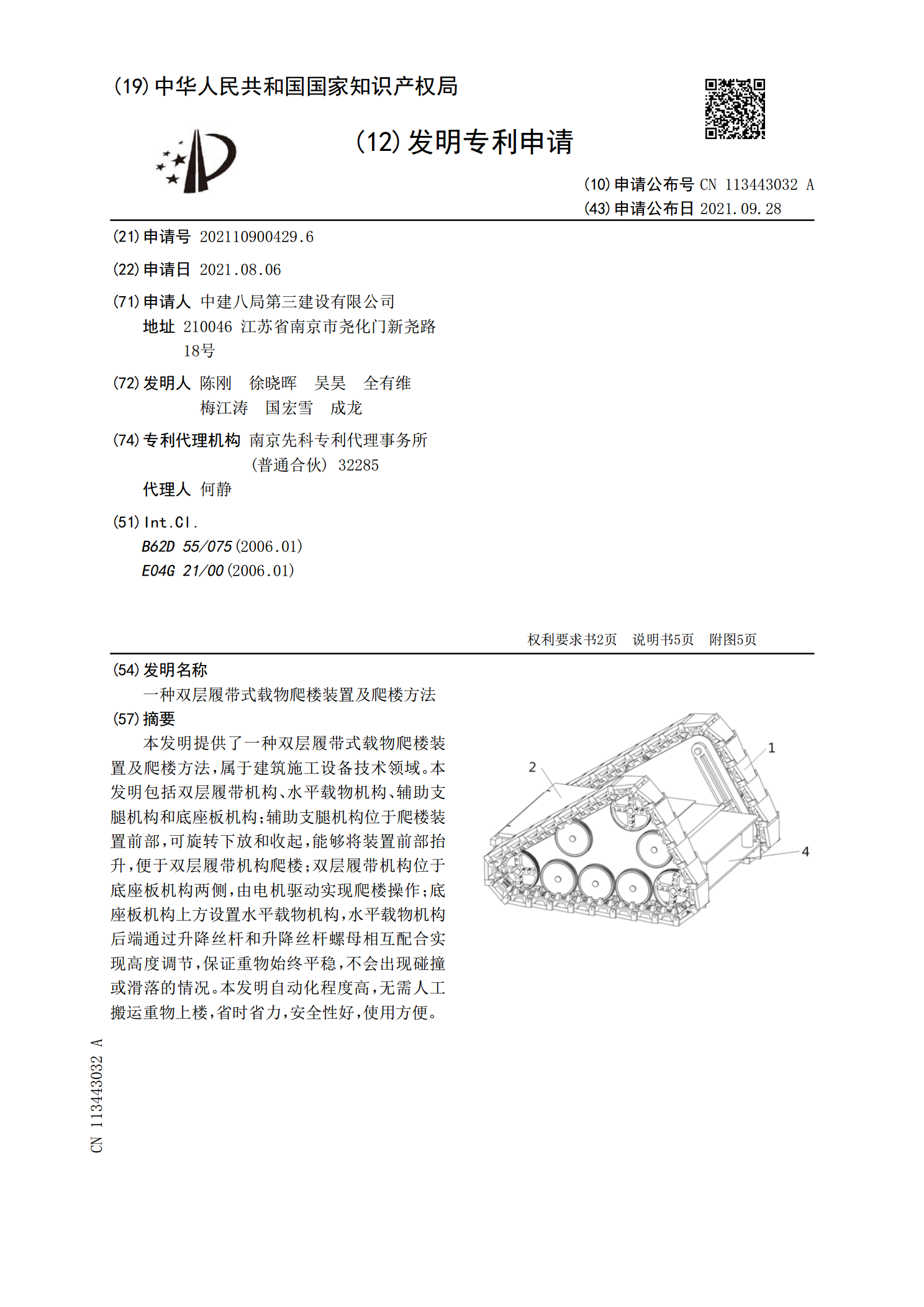
本发明提供了一种双层履带式载物爬楼装置及爬楼方法,属于建筑施工设备技术领域。本发明包括双层履带机构、水平载物机构、辅助支腿机构和底座板机构;辅助支腿机构位于爬楼装置前部,可旋转下放和收起,能够将装置前部抬升,便于双层履带机构爬楼;双层履带机构位于底座板机构两侧,由电机驱动实现爬楼操作;底座板机构上方设置水平载物机构,水平载物机构后端通过升降丝杆和升降丝杆螺母相互配合实现高度调节,保证重物始终平稳,不会出现碰撞或滑落的情况。本发明自动化程度高,无需人工搬运重物上楼,省时省力,安全性好,使用方便。