
一种攀爬装置、爬楼机器人及其爬楼方法.pdf

一吃****新冬

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种攀爬装置、爬楼机器人及其爬楼方法.pdf
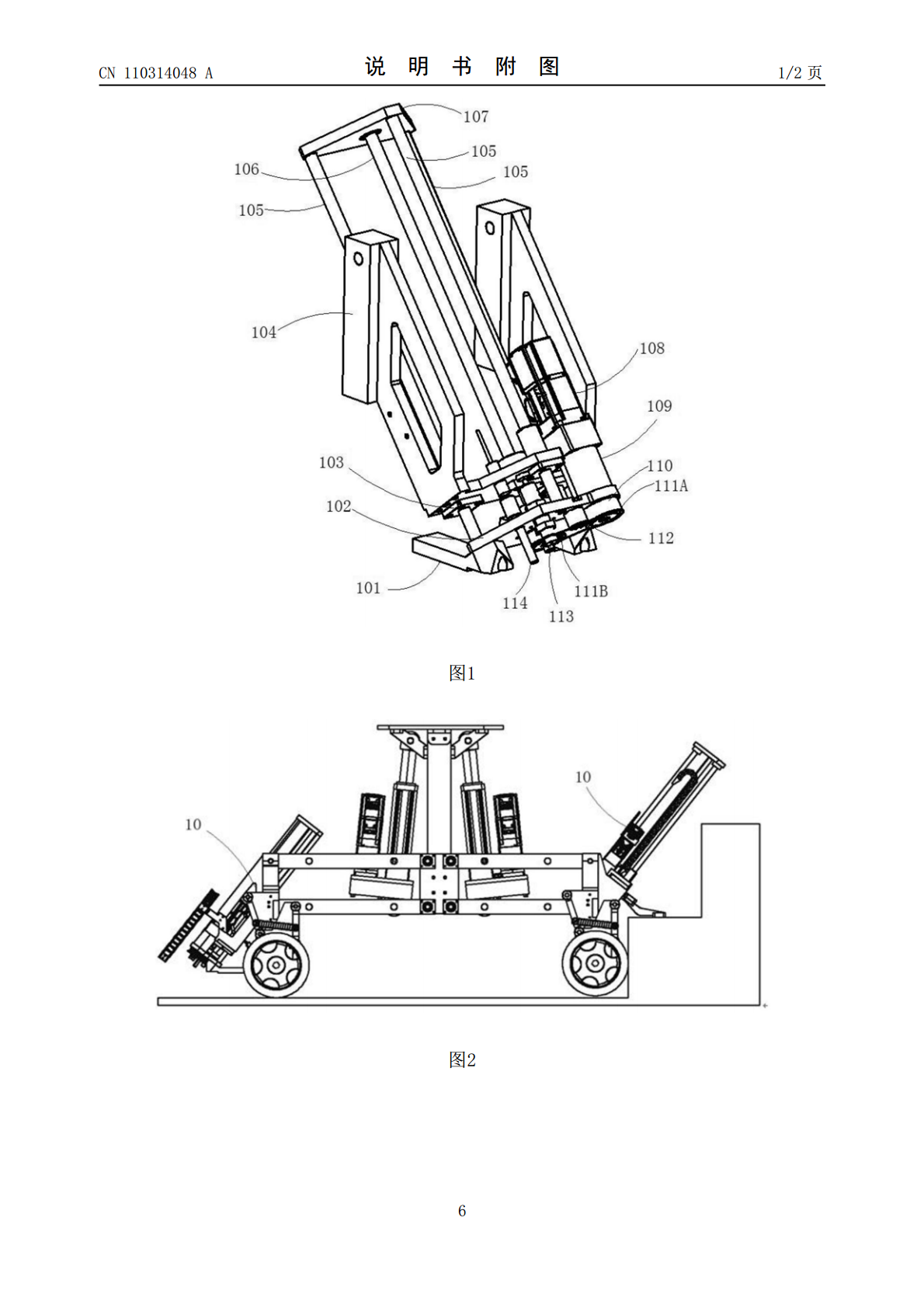
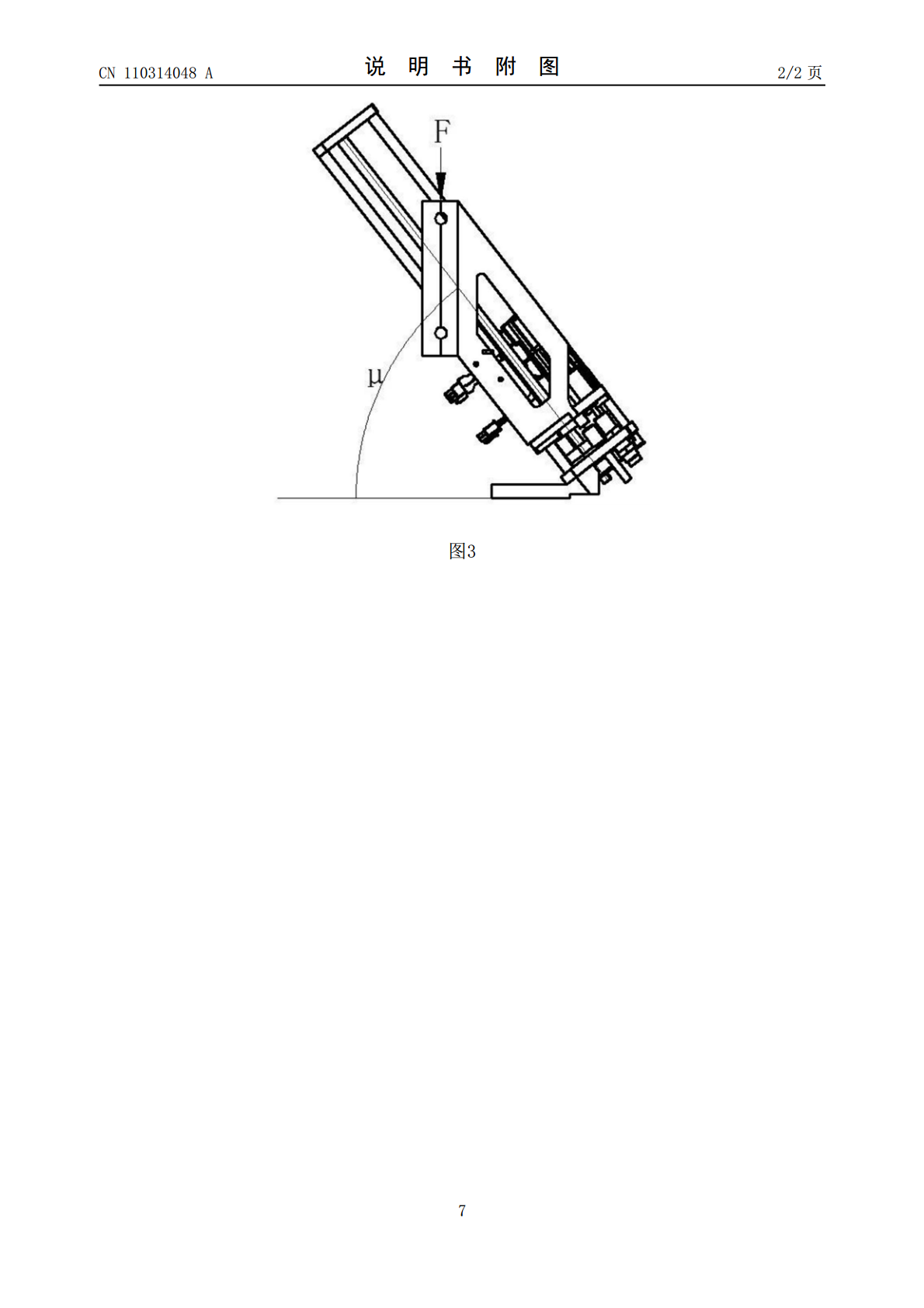
一种攀爬装置及其爬楼机器人,包括爬爪、下移动板、直线轴承、连接固定板、导杆、丝杆、上移动板、电机、减速器、同步带、同步带轮111A、同步带轮111B、涨紧轮、缓冲器、接近开关;所述下移动板与上移动板通过导杆相连,导杆一端与下移动板固接,另一端与上移动板固定形成稳定框架结构,所述爬爪与下移动板固接;所述连接固定板通过直线轴承套在导杆上形成移动副;所述丝杆上端与上移动板连接形成转动副;所述丝杆下端与下移动板连接形成转动副,丝杆中部与连接固定板螺纹连接形成转动副。
一种爬楼装置及其爬楼方法.pdf
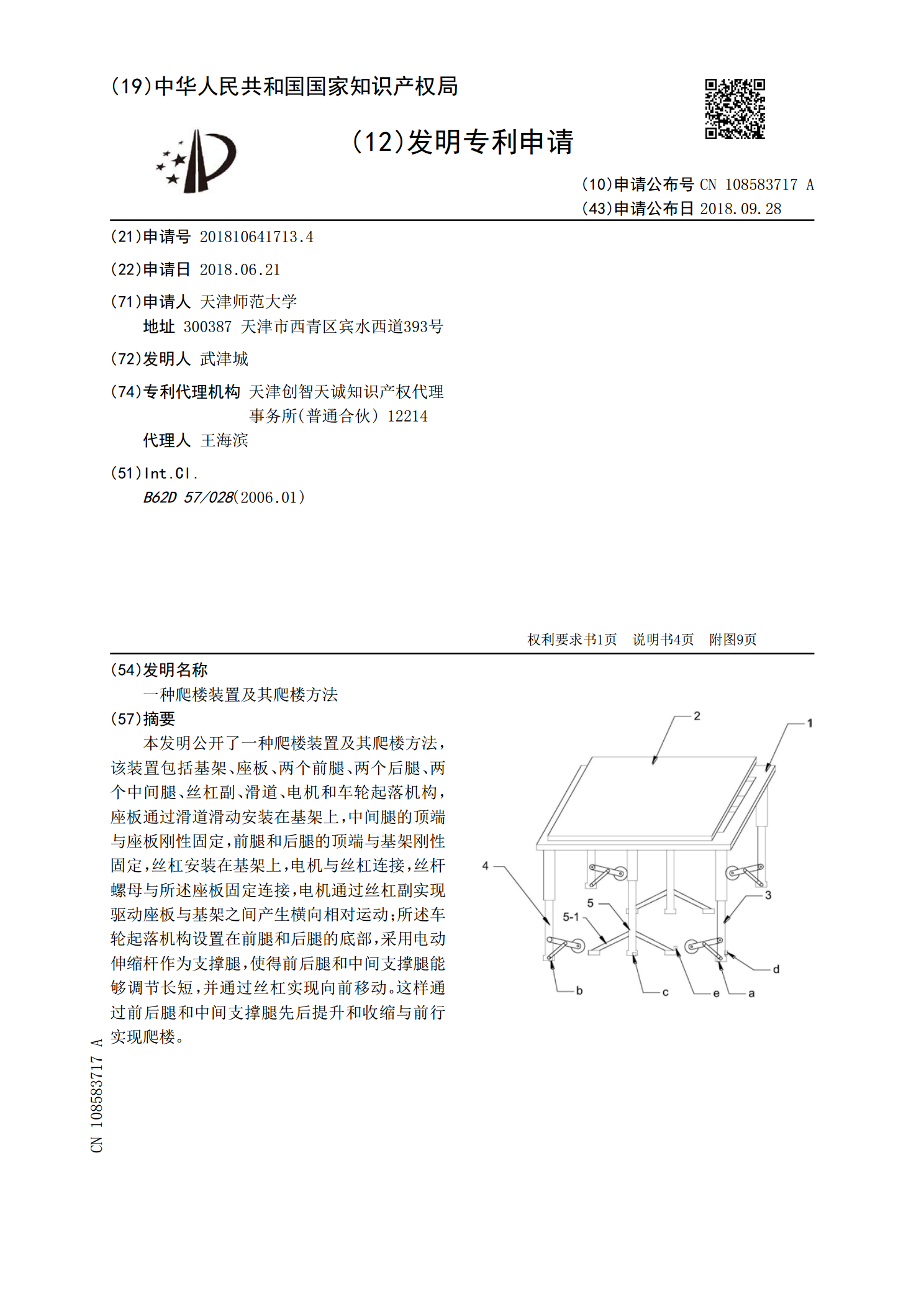
本发明公开了一种爬楼装置及其爬楼方法,该装置包括基架、座板、两个前腿、两个后腿、两个中间腿、丝杠副、滑道、电机和车轮起落机构,座板通过滑道滑动安装在基架上,中间腿的顶端与座板刚性固定,前腿和后腿的顶端与基架刚性固定,丝杠安装在基架上,电机与丝杠连接,丝杆螺母与所述座板固定连接,电机通过丝杠副实现驱动座板与基架之间产生横向相对运动;所述车轮起落机构设置在前腿和后腿的底部,采用电动伸缩杆作为支撑腿,使得前后腿和中间支撑腿能够调节长短,并通过丝杠实现向前移动。这样通过前后腿和中间支撑腿先后提升和收缩与前行实现爬
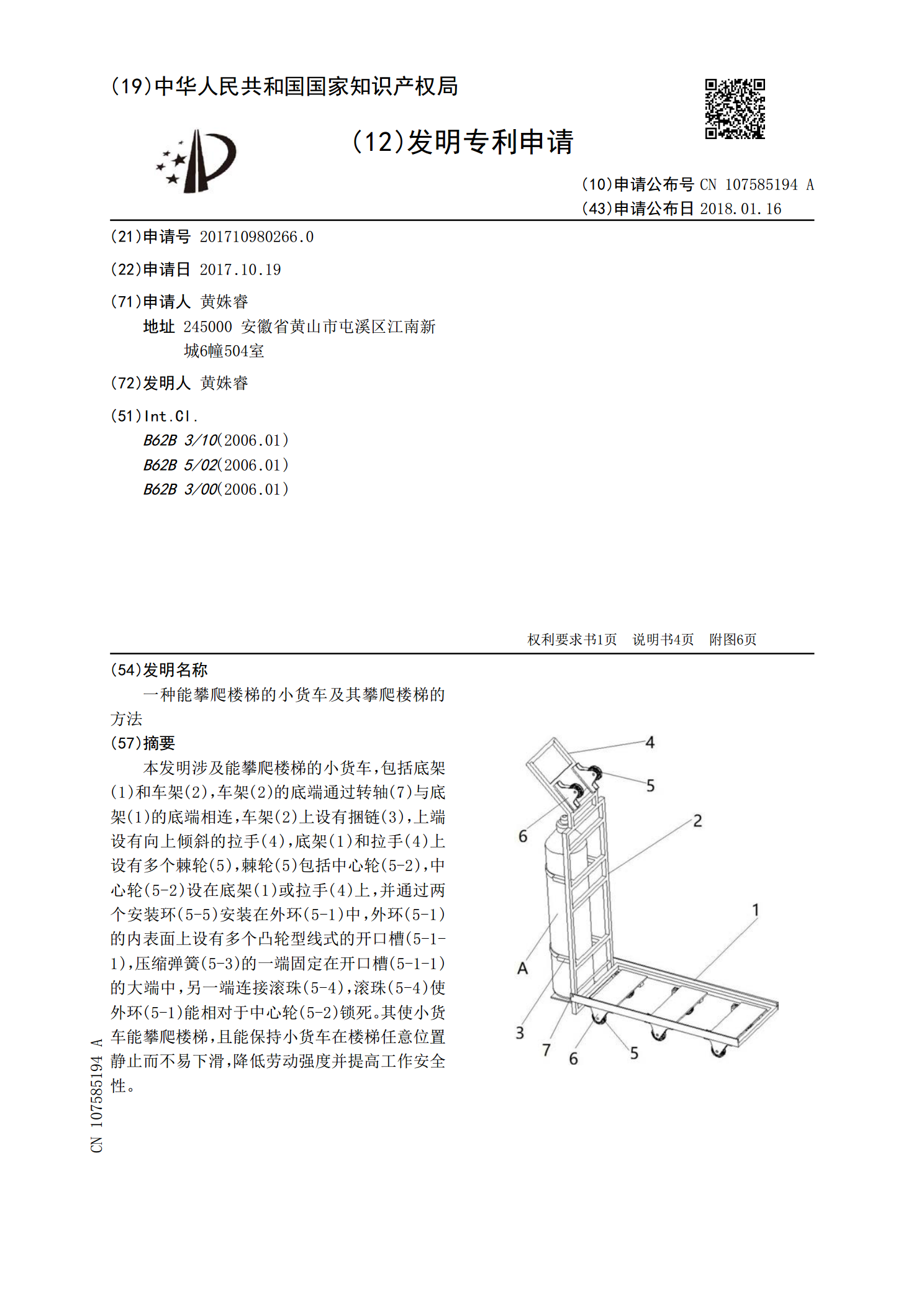
一种能攀爬楼梯的小货车及其攀爬楼梯的方法.pdf
本发明涉及能攀爬楼梯的小货车,包括底架(1)和车架(2),车架(2)的底端通过转轴(7)与底架(1)的底端相连,车架(2)上设有捆链(3),上端设有向上倾斜的拉手(4),底架(1)和拉手(4)上设有多个棘轮(5),棘轮(5)包括中心轮(5‑2),中心轮(5‑2)设在底架(1)或拉手(4)上,并通过两个安装环(5‑5)安装在外环(5‑1)中,外环(5‑1)的内表面上设有多个凸轮型线式的开口槽(5‑1‑1),压缩弹簧(5‑3)的一端固定在开口槽(5‑1‑1)的大端中,另一端连接滚珠(5‑4),滚珠(5‑4)使
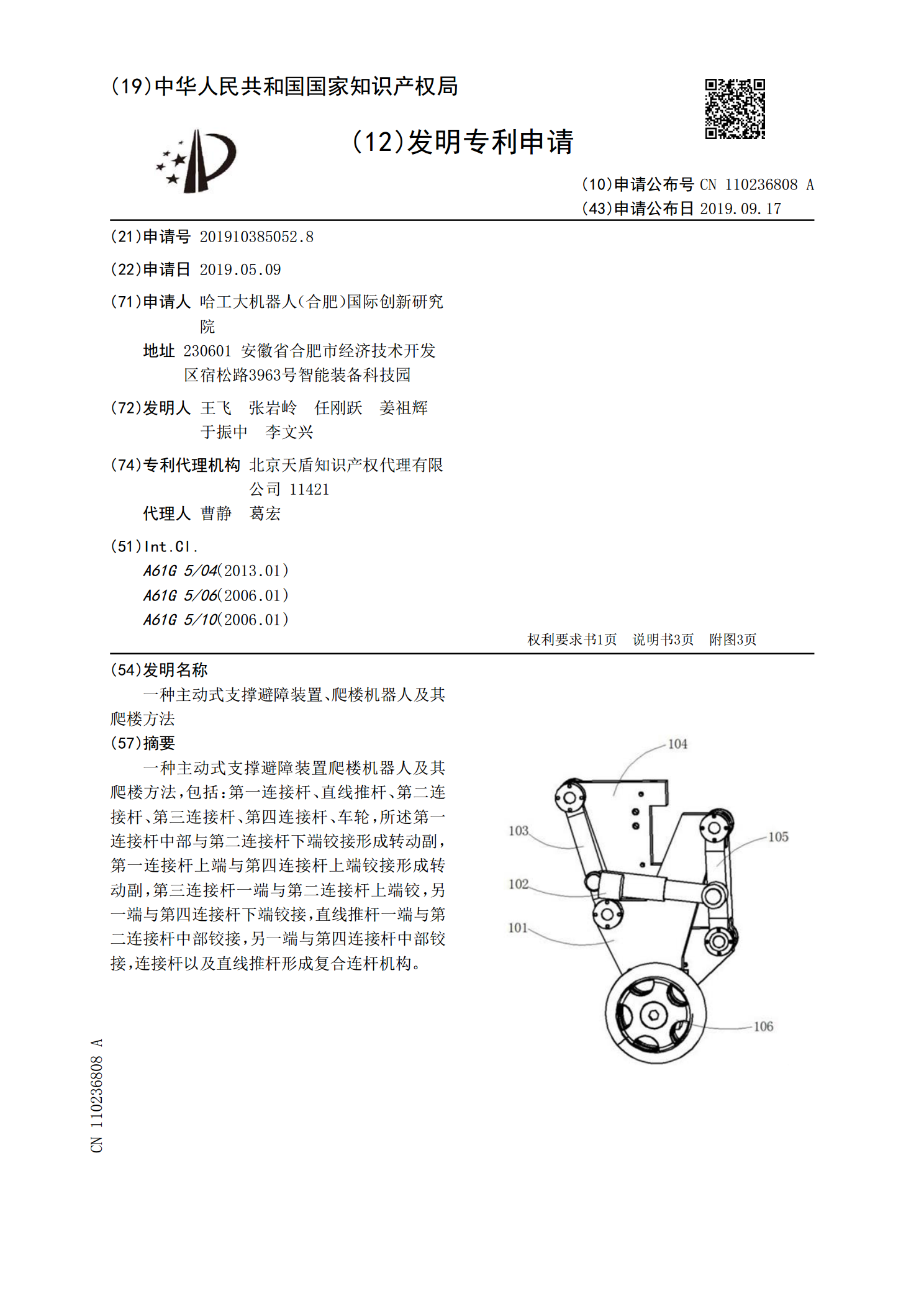
一种主动式支撑避障装置、爬楼机器人及其爬楼方法.pdf
一种主动式支撑避障装置爬楼机器人及其爬楼方法,包括:第一连接杆、直线推杆、第二连接杆、第三连接杆、第四连接杆、车轮,所述第一连接杆中部与第二连接杆下端铰接形成转动副,第一连接杆上端与第四连接杆上端铰接形成转动副,第三连接杆一端与第二连接杆上端铰,另一端与第四连接杆下端铰接,直线推杆一端与第二连接杆中部铰接,另一端与第四连接杆中部铰接,连接杆以及直线推杆形成复合连杆机构。
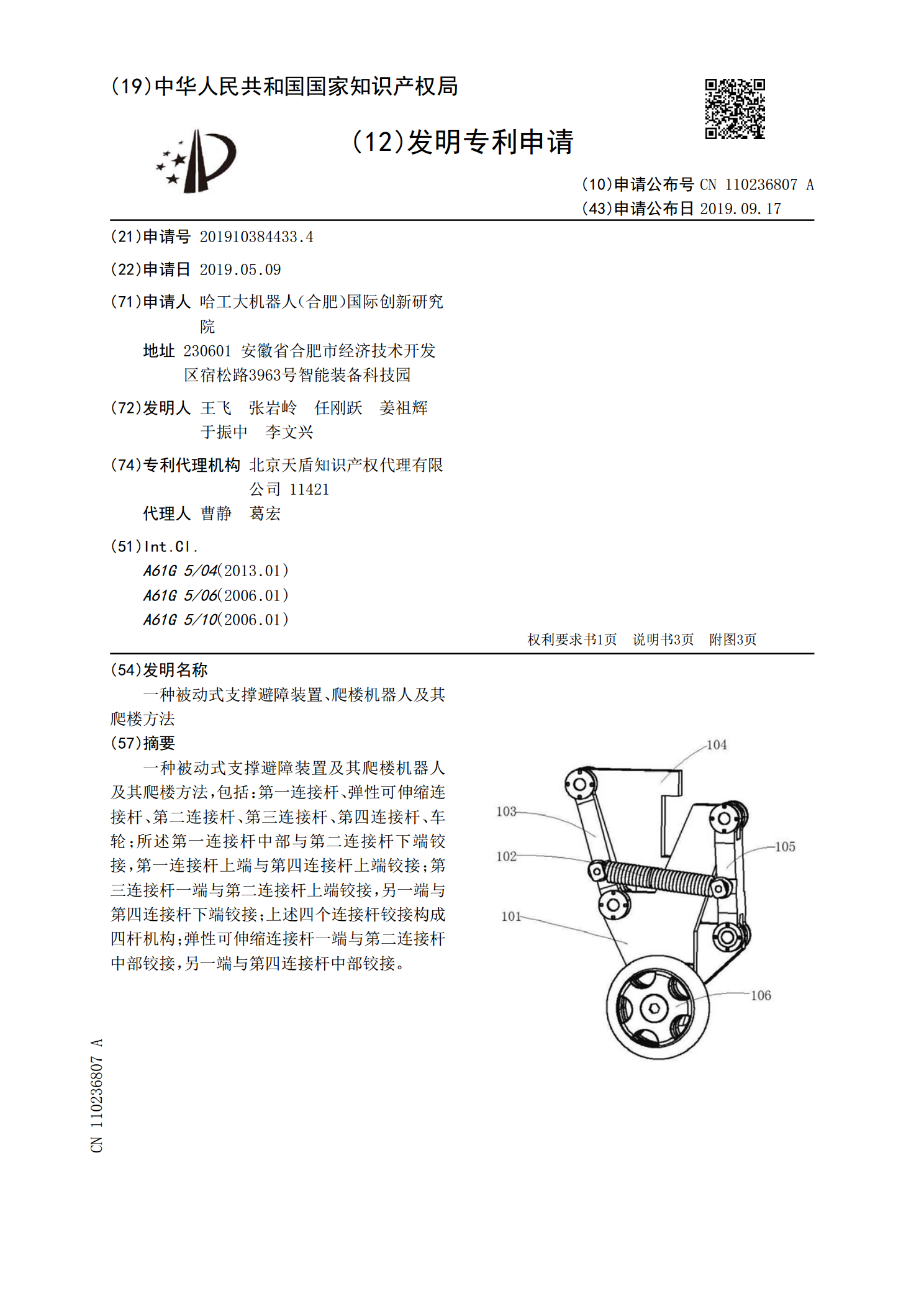
一种被动式支撑避障装置、爬楼机器人及其爬楼方法.pdf
一种被动式支撑避障装置及其爬楼机器人及其爬楼方法,包括:第一连接杆、弹性可伸缩连接杆、第二连接杆、第三连接杆、第四连接杆、车轮;所述第一连接杆中部与第二连接杆下端铰接,第一连接杆上端与第四连接杆上端铰接;第三连接杆一端与第二连接杆上端铰接,另一端与第四连接杆下端铰接;上述四个连接杆铰接构成四杆机构;弹性可伸缩连接杆一端与第二连接杆中部铰接,另一端与第四连接杆中部铰接。