
一种搬运式工业机器人.pdf

猫巷****盟主

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种搬运式工业机器人.pdf
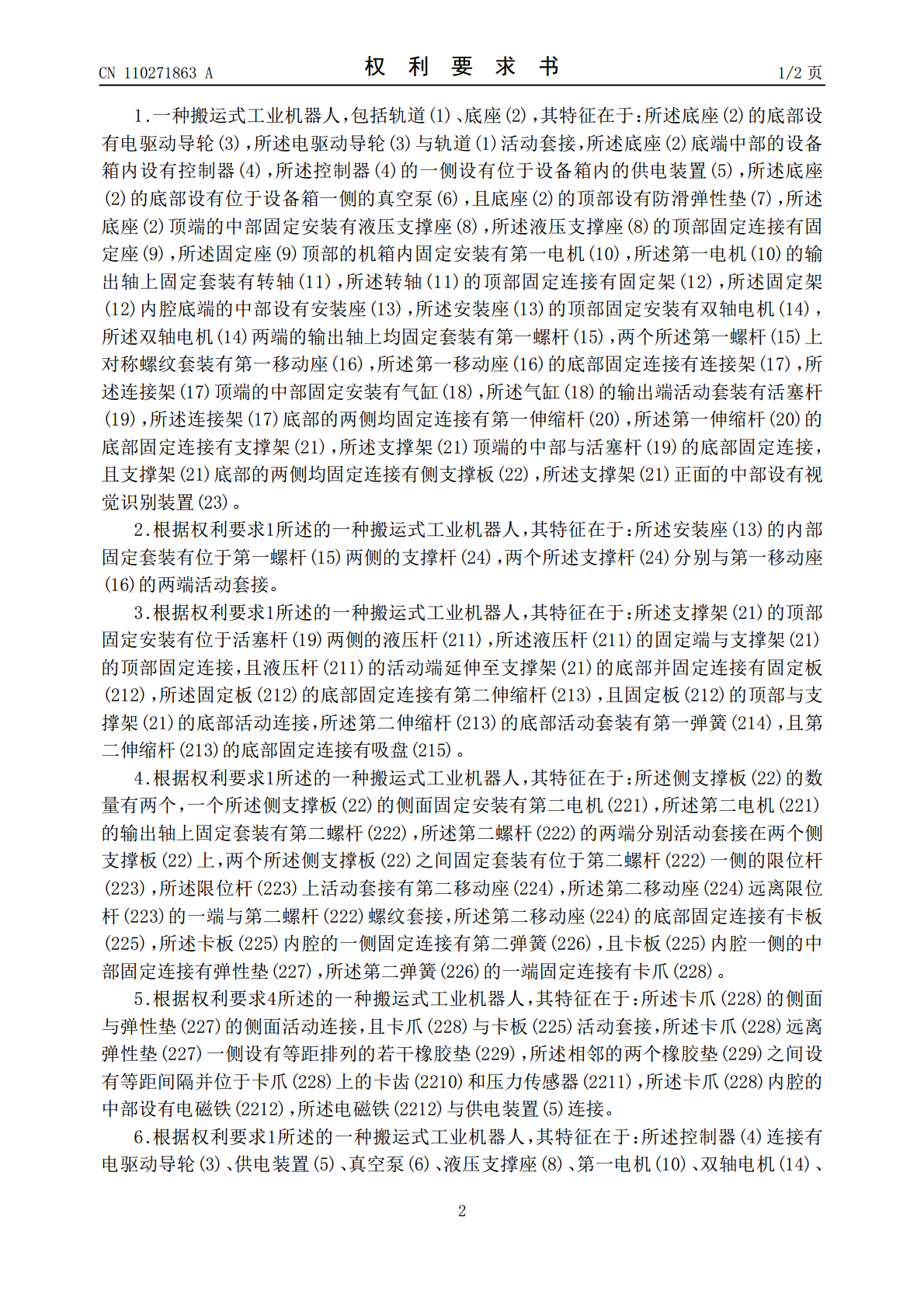
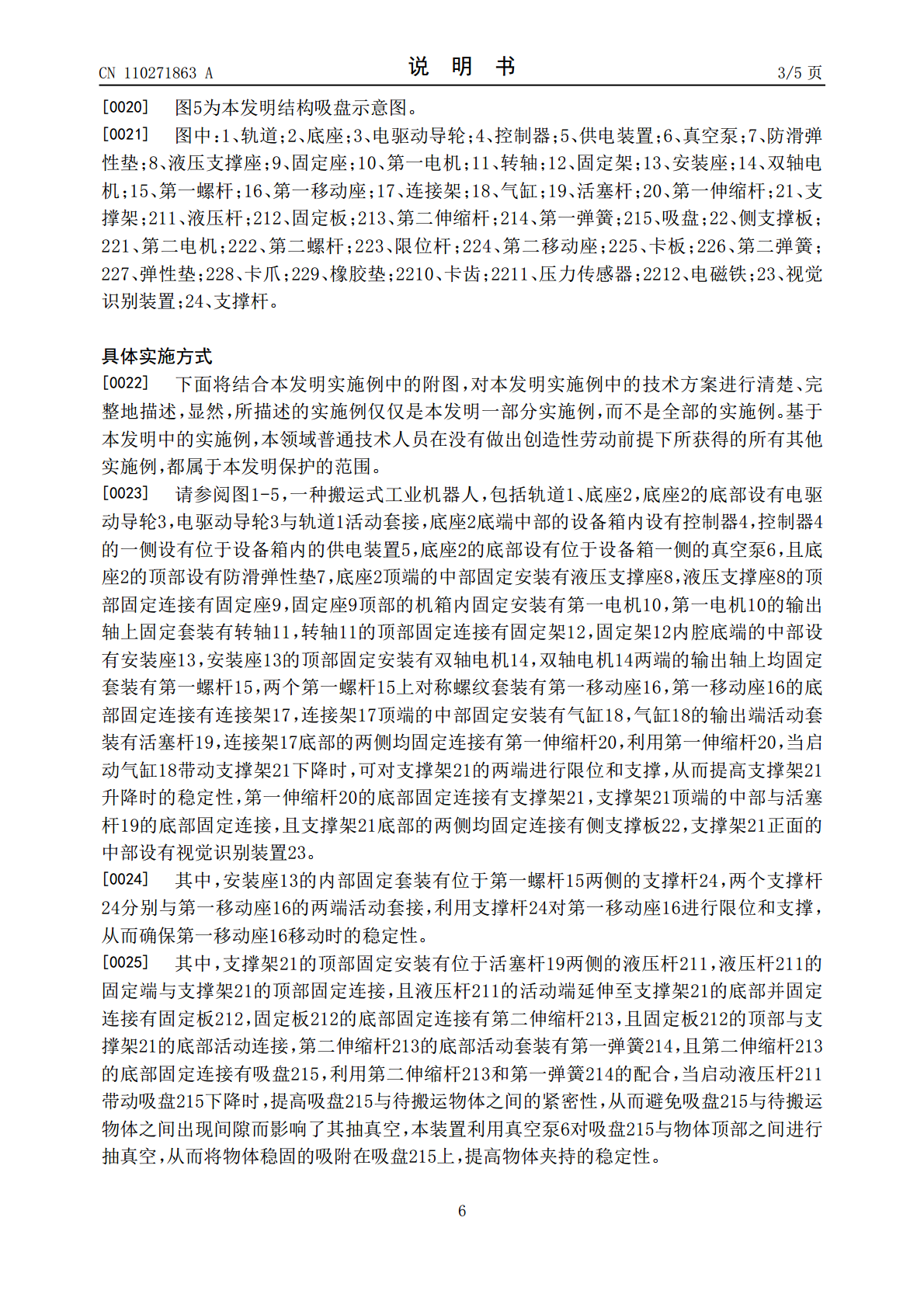
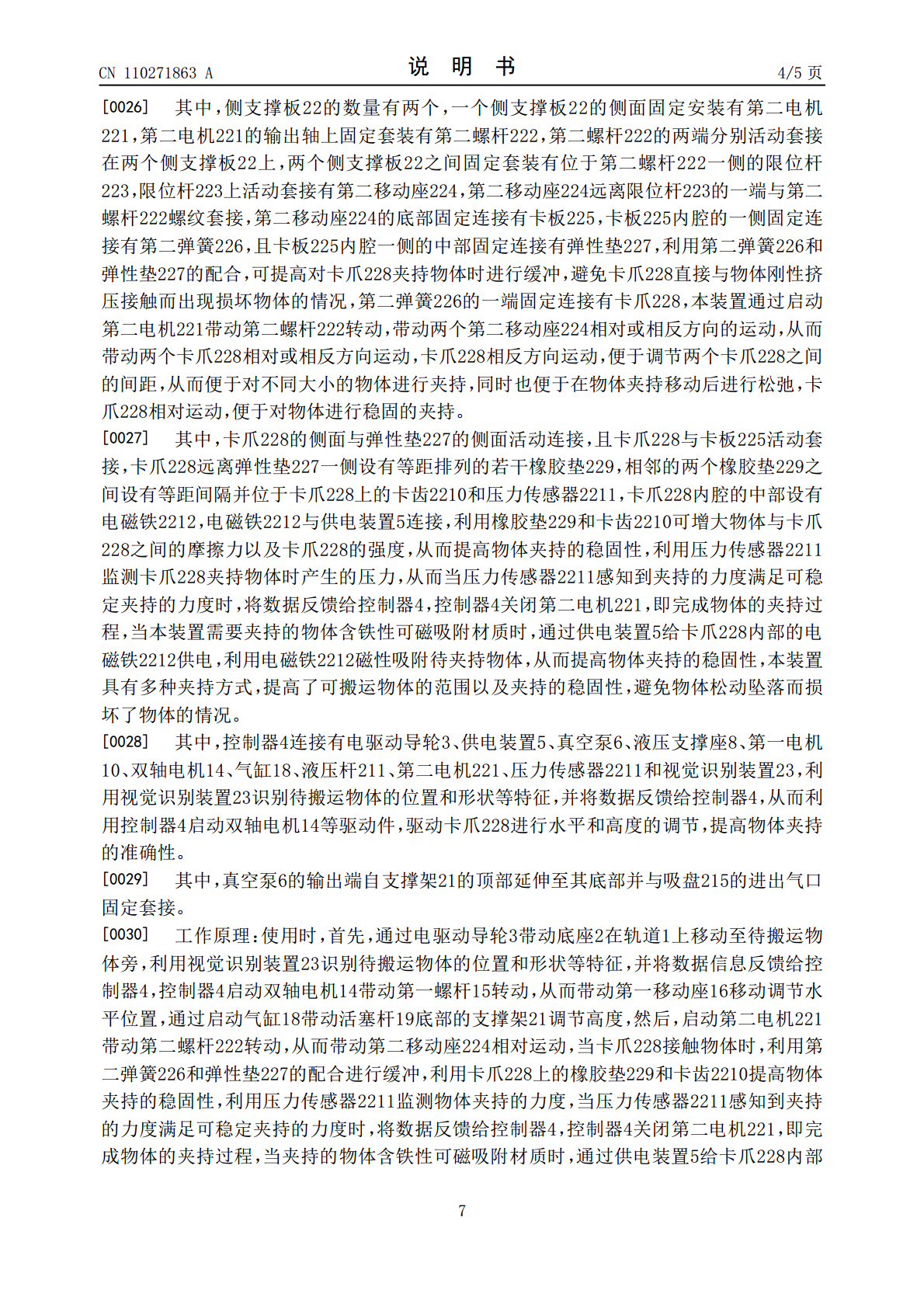
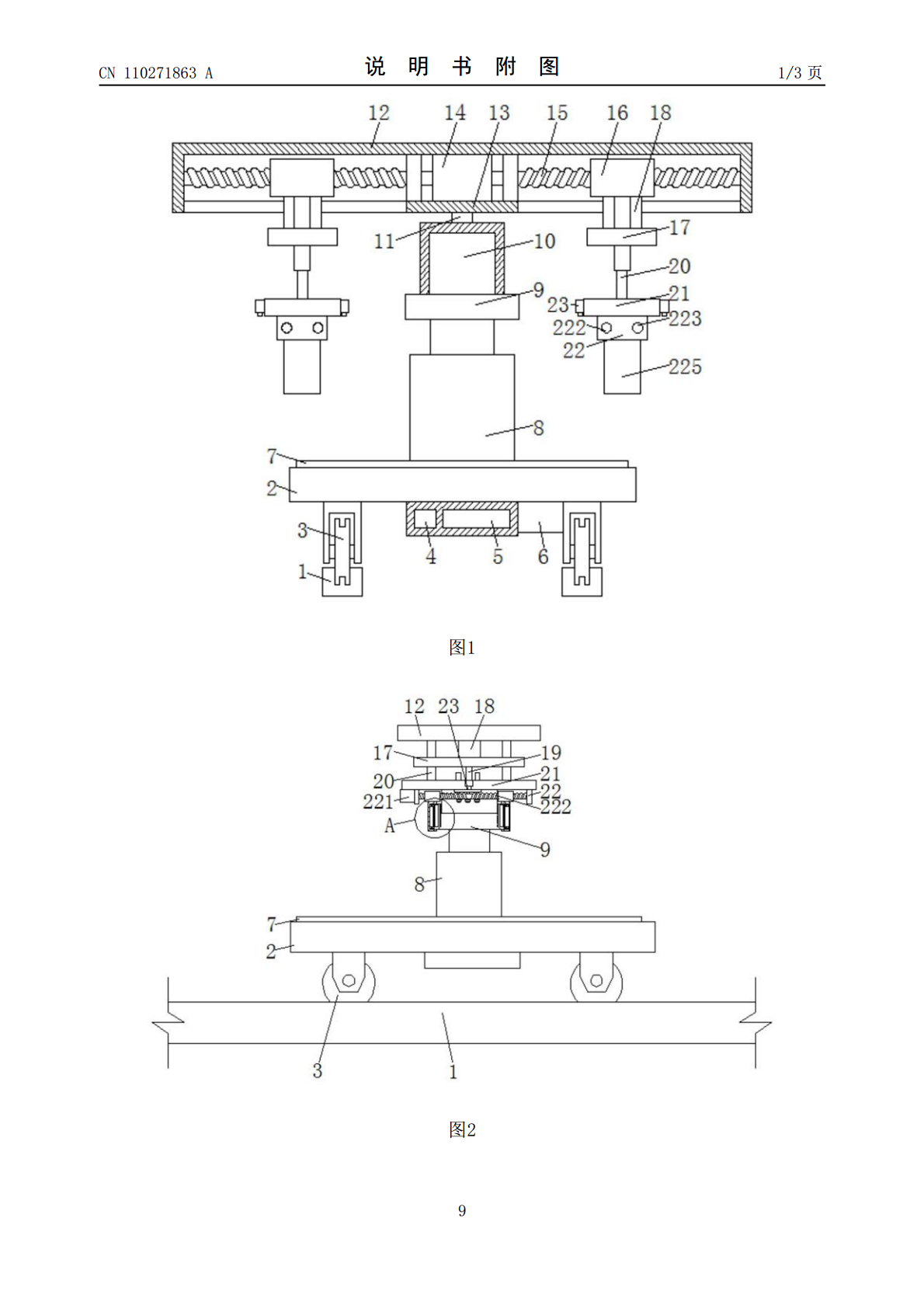
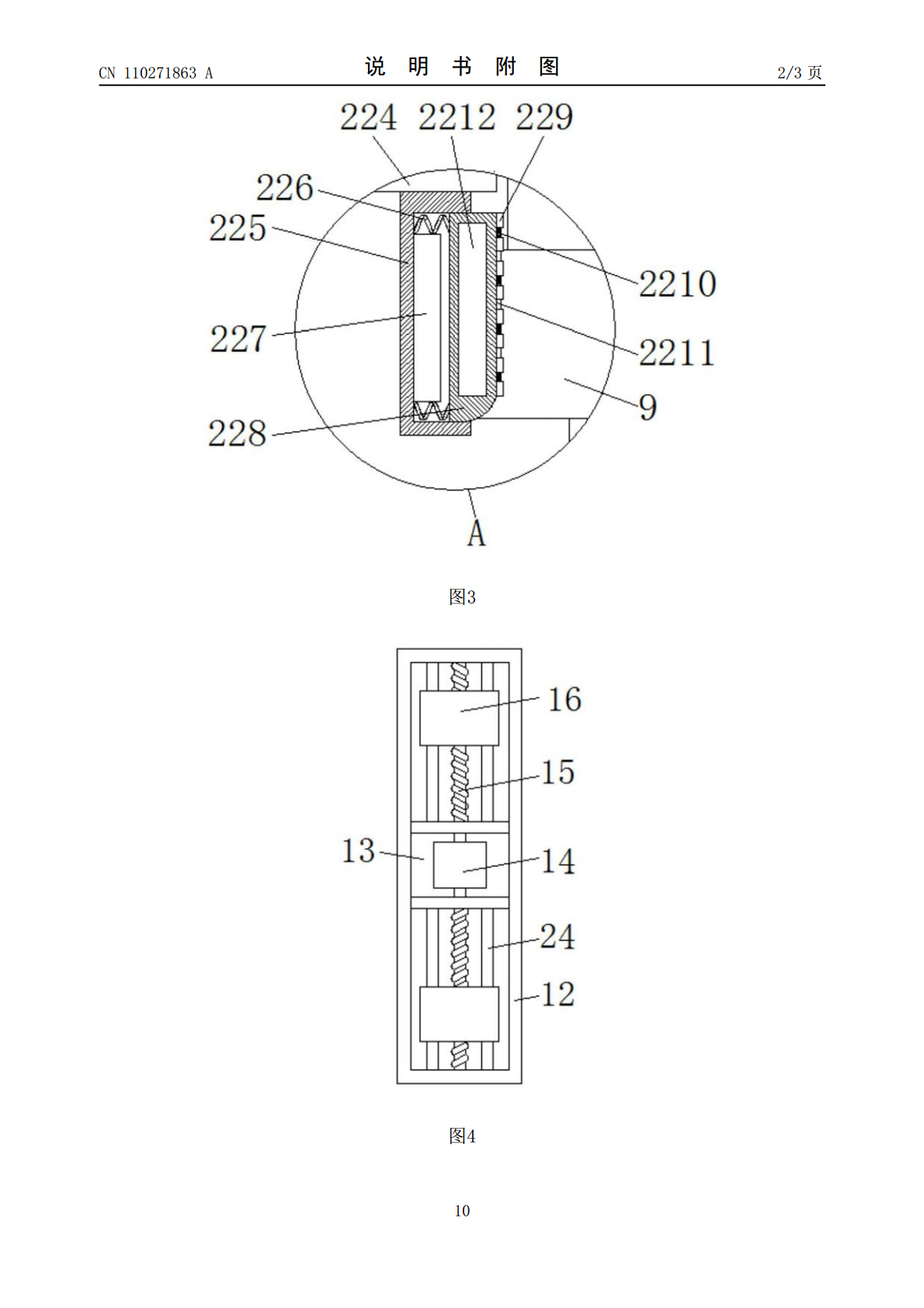
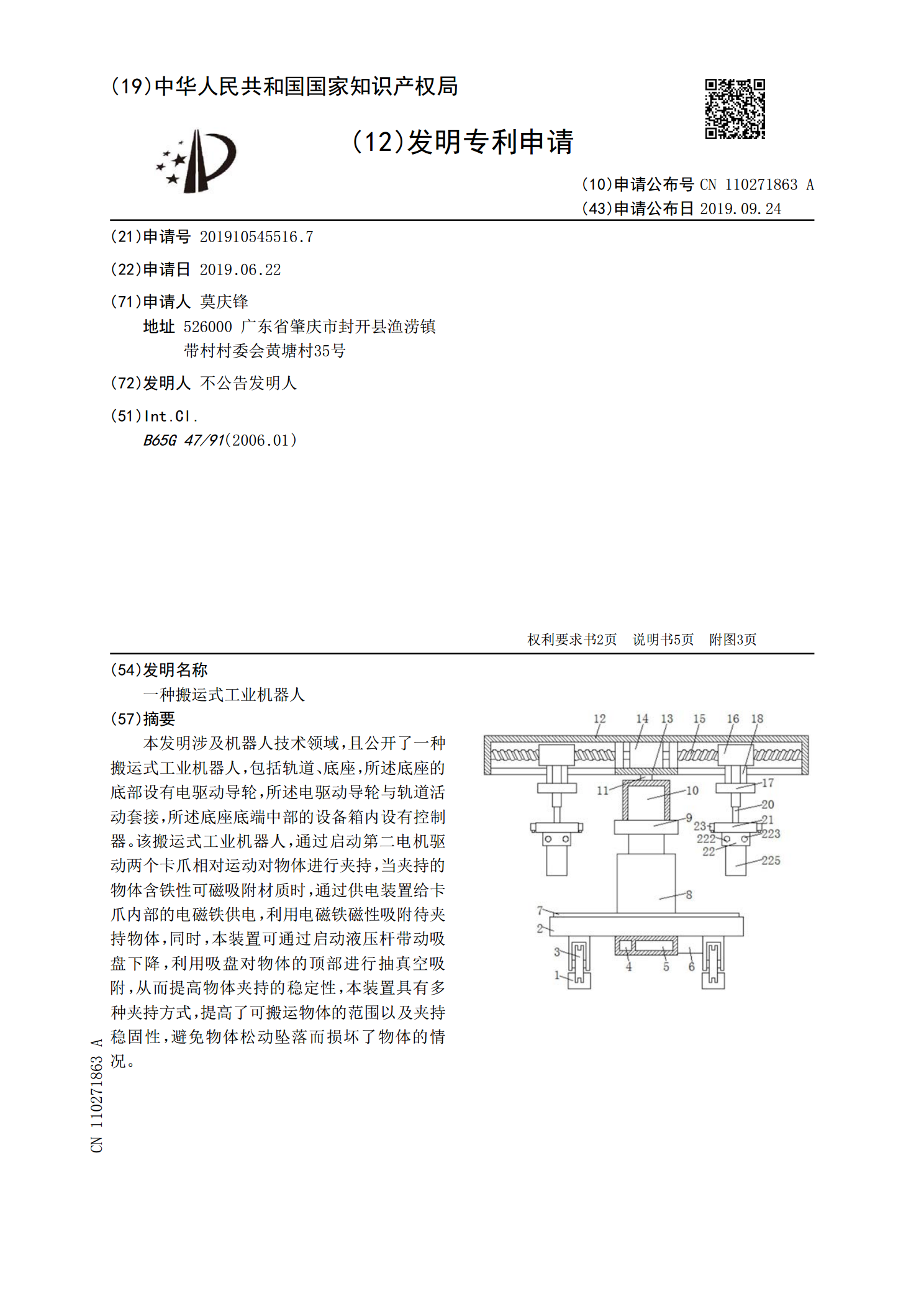
本发明涉及机器人技术领域,且公开了一种搬运式工业机器人,包括轨道、底座,所述底座的底部设有电驱动导轮,所述电驱动导轮与轨道活动套接,所述底座底端中部的设备箱内设有控制器。该搬运式工业机器人,通过启动第二电机驱动两个卡爪相对运动对物体进行夹持,当夹持的物体含铁性可磁吸附材质时,通过供电装置给卡爪内部的电磁铁供电,利用电磁铁磁性吸附待夹持物体,同时,本装置可通过启动液压杆带动吸盘下降,利用吸盘对物体的顶部进行抽真空吸附,从而提高物体夹持的稳定性,本装置具有多种夹持方式,提高了可搬运物体的范围以及夹持稳固性,避
一种可移动式工业搬运机器人.pdf
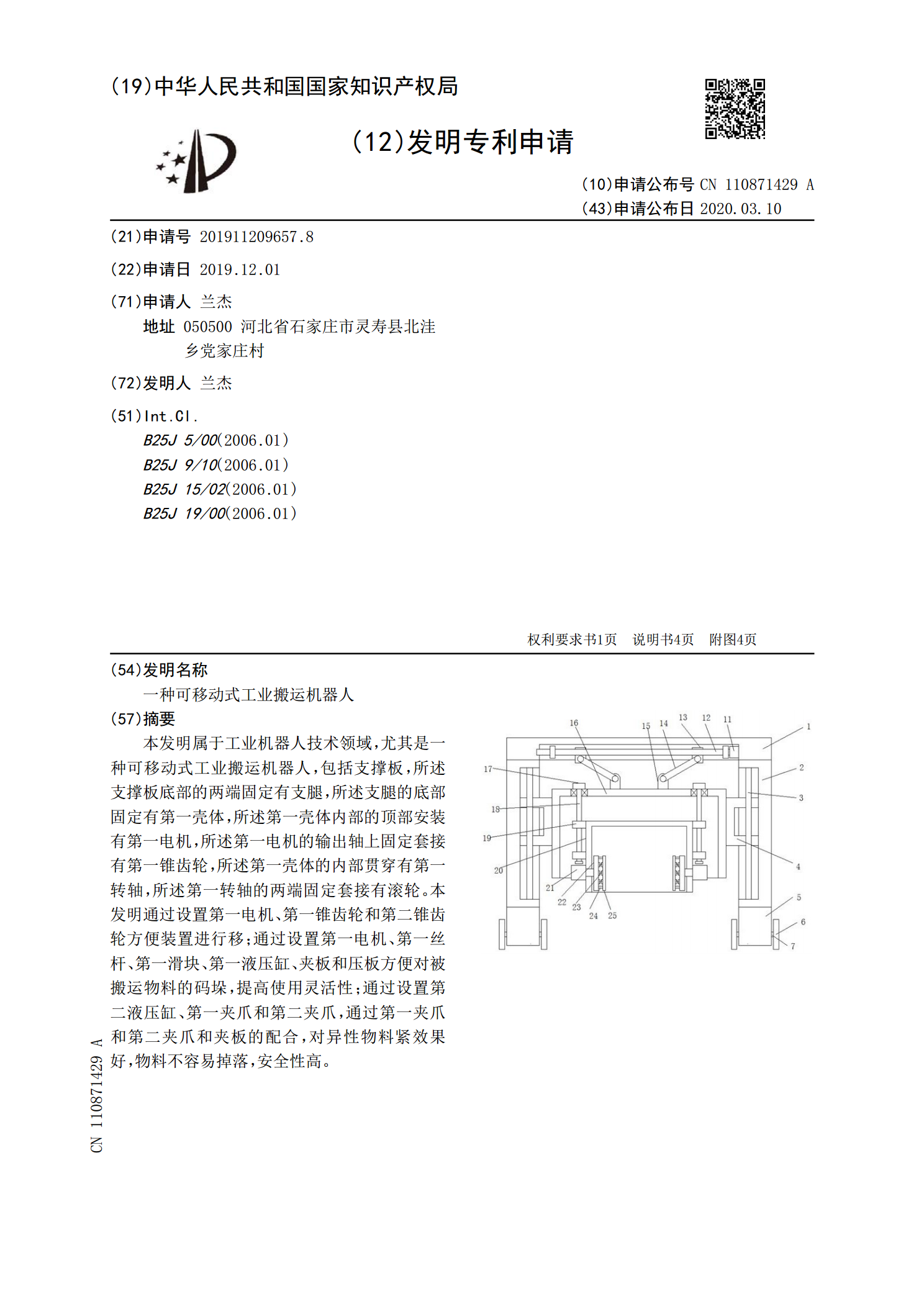
本发明属于工业机器人技术领域,尤其是一种可移动式工业搬运机器人,包括支撑板,所述支撑板底部的两端固定有支腿,所述支腿的底部固定有第一壳体,所述第一壳体内部的顶部安装有第一电机,所述第一电机的输出轴上固定套接有第一锥齿轮,所述第一壳体的内部贯穿有第一转轴,所述第一转轴的两端固定套接有滚轮。本发明通过设置第一电机、第一锥齿轮和第二锥齿轮方便装置进行移;通过设置第一电机、第一丝杆、第一滑块、第一液压缸、夹板和压板方便对被搬运物料的码垛,提高使用灵活性;通过设置第二液压缸、第一夹爪和第二夹爪,通过第一夹爪和第二夹
一种工业搬运机器人.pdf
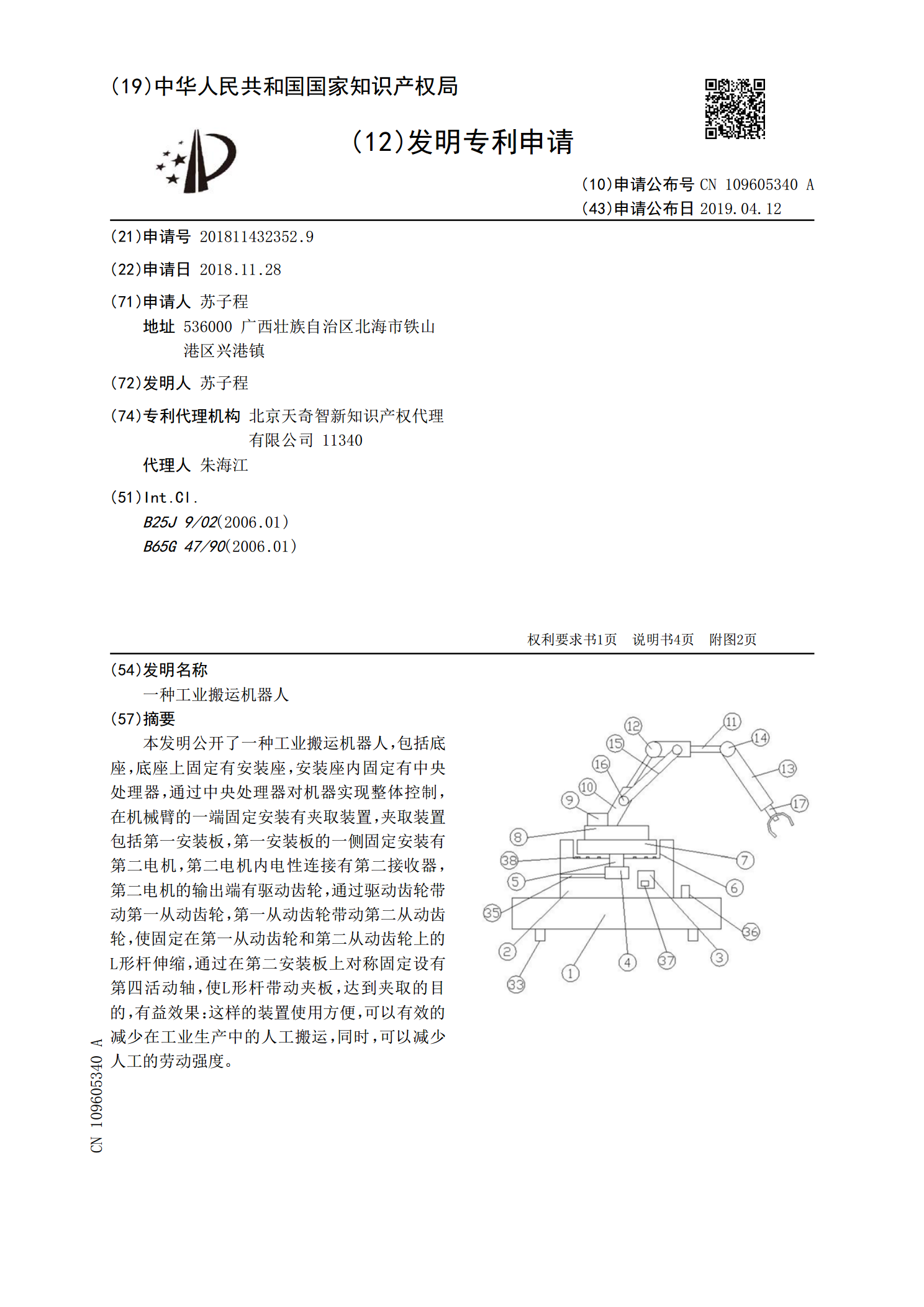
本发明公开了一种工业搬运机器人,包括底座,底座上固定有安装座,安装座内固定有中央处理器,通过中央处理器对机器实现整体控制,在机械臂的一端固定安装有夹取装置,夹取装置包括第一安装板,第一安装板的一侧固定安装有第二电机,第二电机内电性连接有第二接收器,第二电机的输出端有驱动齿轮,通过驱动齿轮带动第一从动齿轮,第一从动齿轮带动第二从动齿轮,使固定在第一从动齿轮和第二从动齿轮上的L形杆伸缩,通过在第二安装板上对称固定设有第四活动轴,使L形杆带动夹板,达到夹取的目的,有益效果:这样的装置使用方便,可以有效的减少在工
一种工业搬运机器人.pdf
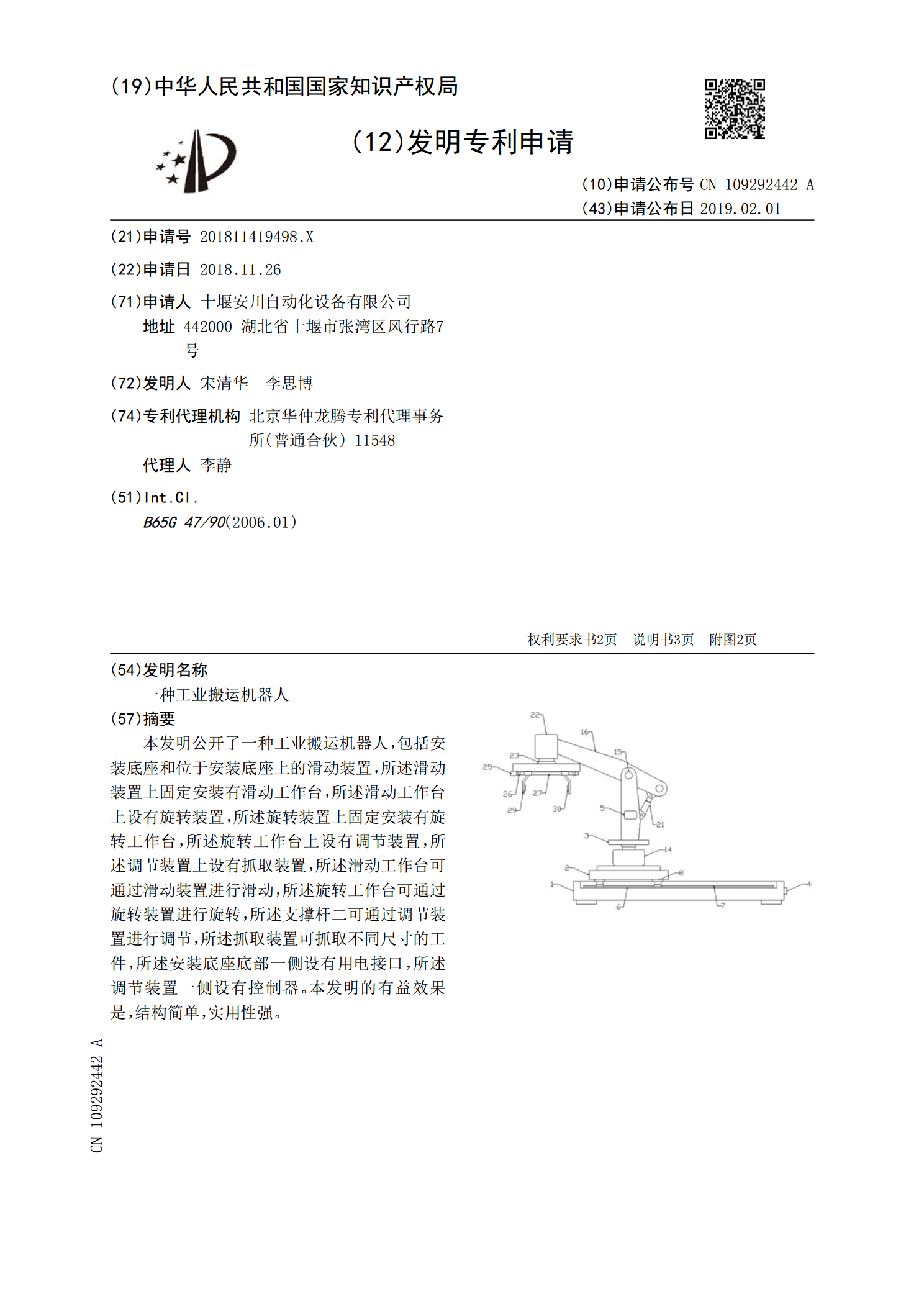
本发明公开了一种工业搬运机器人,包括安装底座和位于安装底座上的滑动装置,所述滑动装置上固定安装有滑动工作台,所述滑动工作台上设有旋转装置,所述旋转装置上固定安装有旋转工作台,所述旋转工作台上设有调节装置,所述调节装置上设有抓取装置,所述滑动工作台可通过滑动装置进行滑动,所述旋转工作台可通过旋转装置进行旋转,所述支撑杆二可通过调节装置进行调节,所述抓取装置可抓取不同尺寸的工件,所述安装底座底部一侧设有用电接口,所述调节装置一侧设有控制器。本发明的有益效果是,结构简单,实用性强。

一种搬运工业机器人.pdf
本发明公开了一种搬运工业机器人,包括第一横板、第一底座和控制箱,所述第一横板的下表面固接有第一底座,所述第一横板的上方设有控制箱,所述第一横板的上方设有转动装置。该搬运工业机器人,通过电机的输出轴带动螺纹杆进行转动,螺纹杆带动第一齿轮进行转动,第一齿轮带动第一连杆进行转动,使第一连杆带动圆杆进行移动,从而圆杆带动竖杆进行移动,解决了现有技术的搬运机器人无法对较高或者较低地方的货物进行搬运的问题,通过第一电动推杆带动第二连杆进行移动,使第二连杆带动第三连杆进行移动,第三连杆带动第二齿轮进行转动,从而使第三连