
一种可移动式工业搬运机器人.pdf

一条****贺6

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可移动式工业搬运机器人.pdf
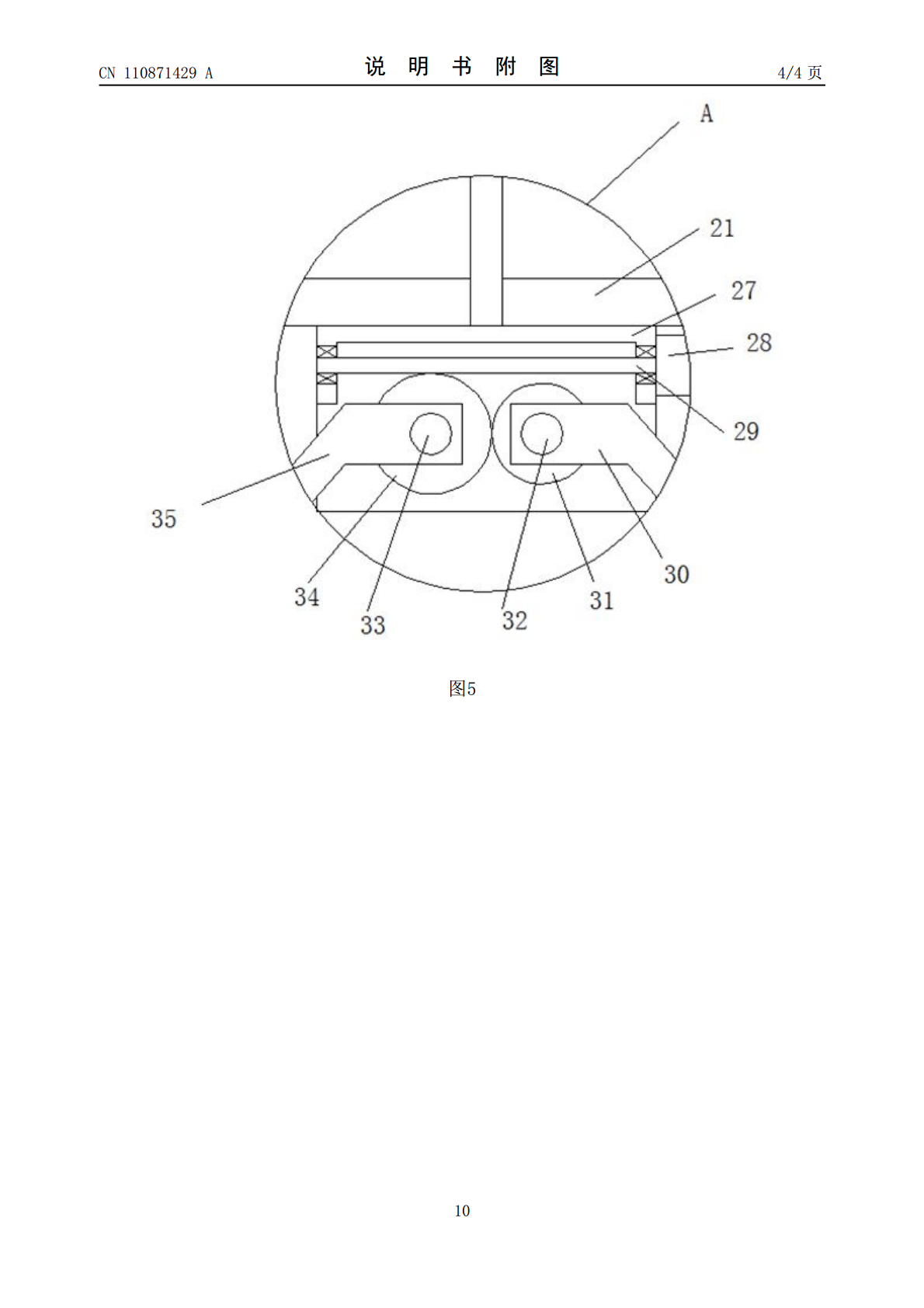
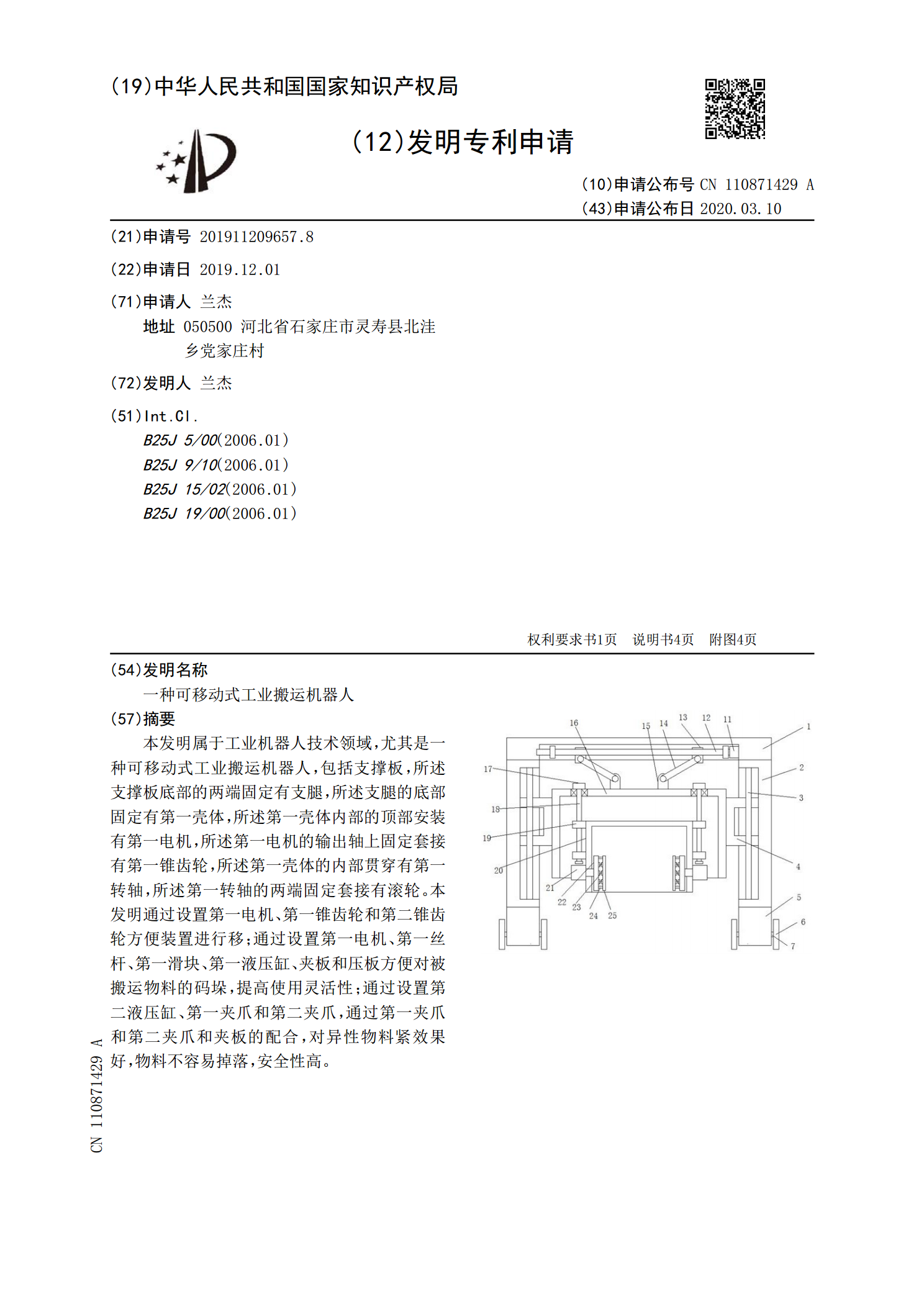
本发明属于工业机器人技术领域,尤其是一种可移动式工业搬运机器人,包括支撑板,所述支撑板底部的两端固定有支腿,所述支腿的底部固定有第一壳体,所述第一壳体内部的顶部安装有第一电机,所述第一电机的输出轴上固定套接有第一锥齿轮,所述第一壳体的内部贯穿有第一转轴,所述第一转轴的两端固定套接有滚轮。本发明通过设置第一电机、第一锥齿轮和第二锥齿轮方便装置进行移;通过设置第一电机、第一丝杆、第一滑块、第一液压缸、夹板和压板方便对被搬运物料的码垛,提高使用灵活性;通过设置第二液压缸、第一夹爪和第二夹爪,通过第一夹爪和第二夹

可移动式工业教学机器人.pdf
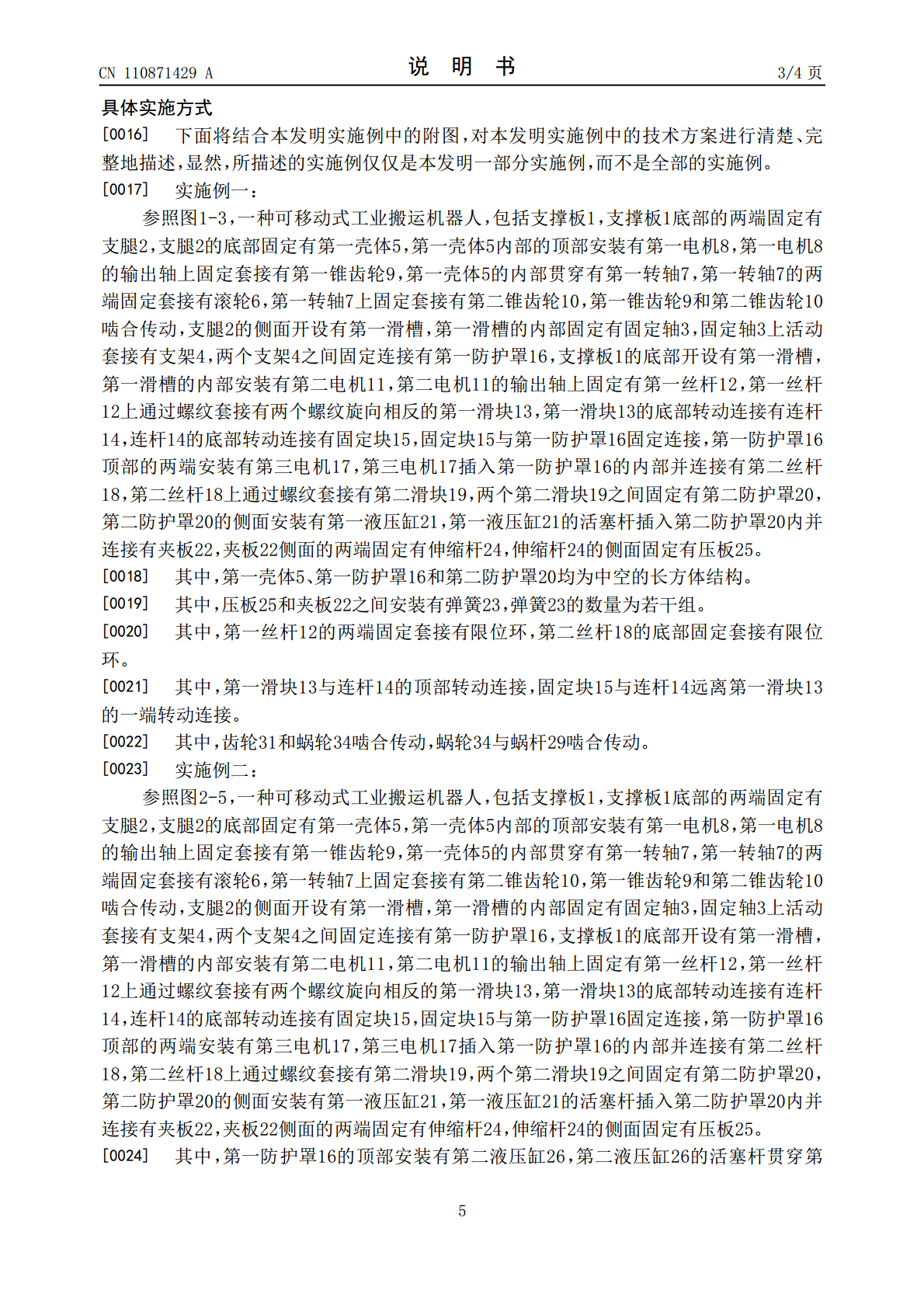
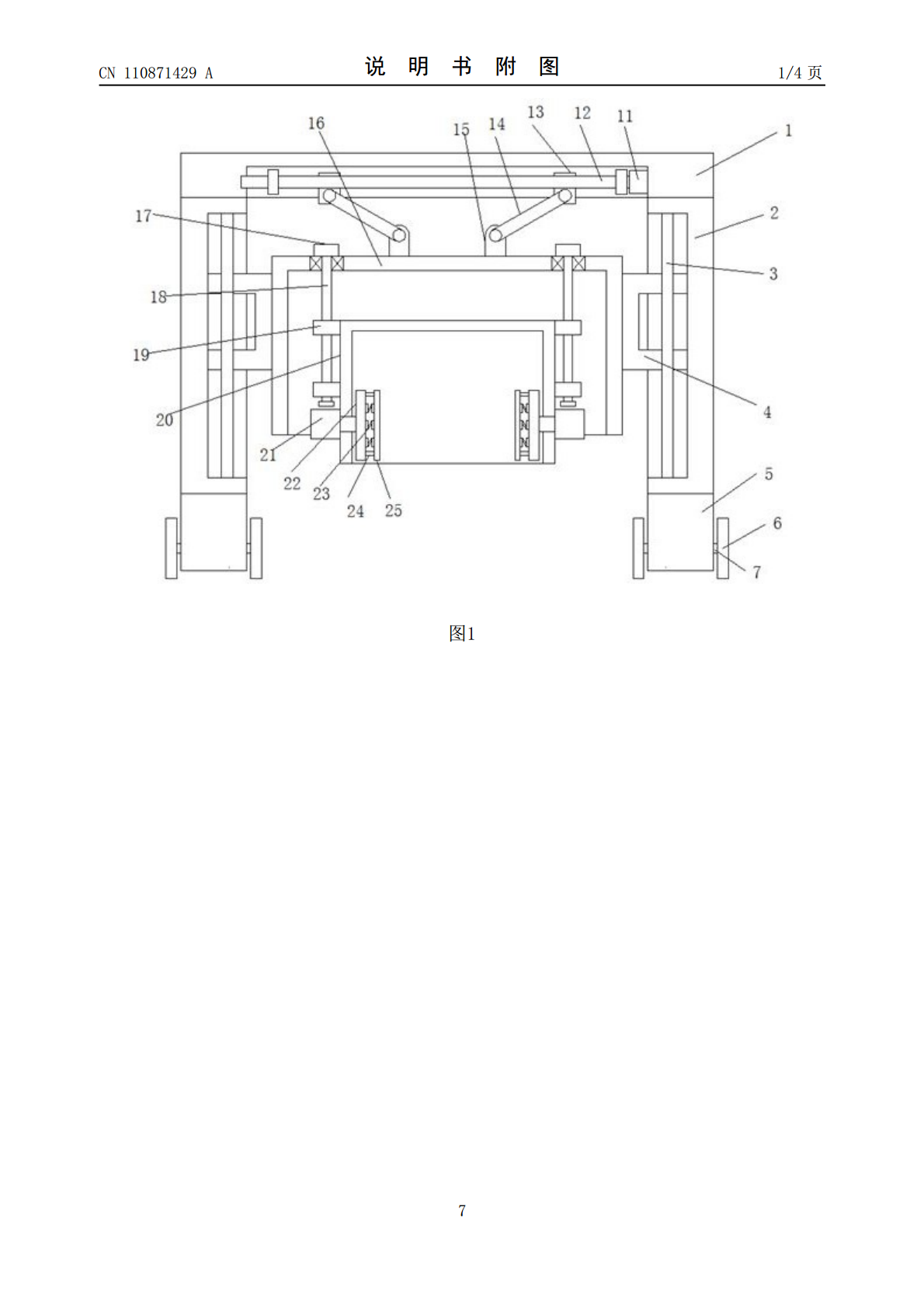
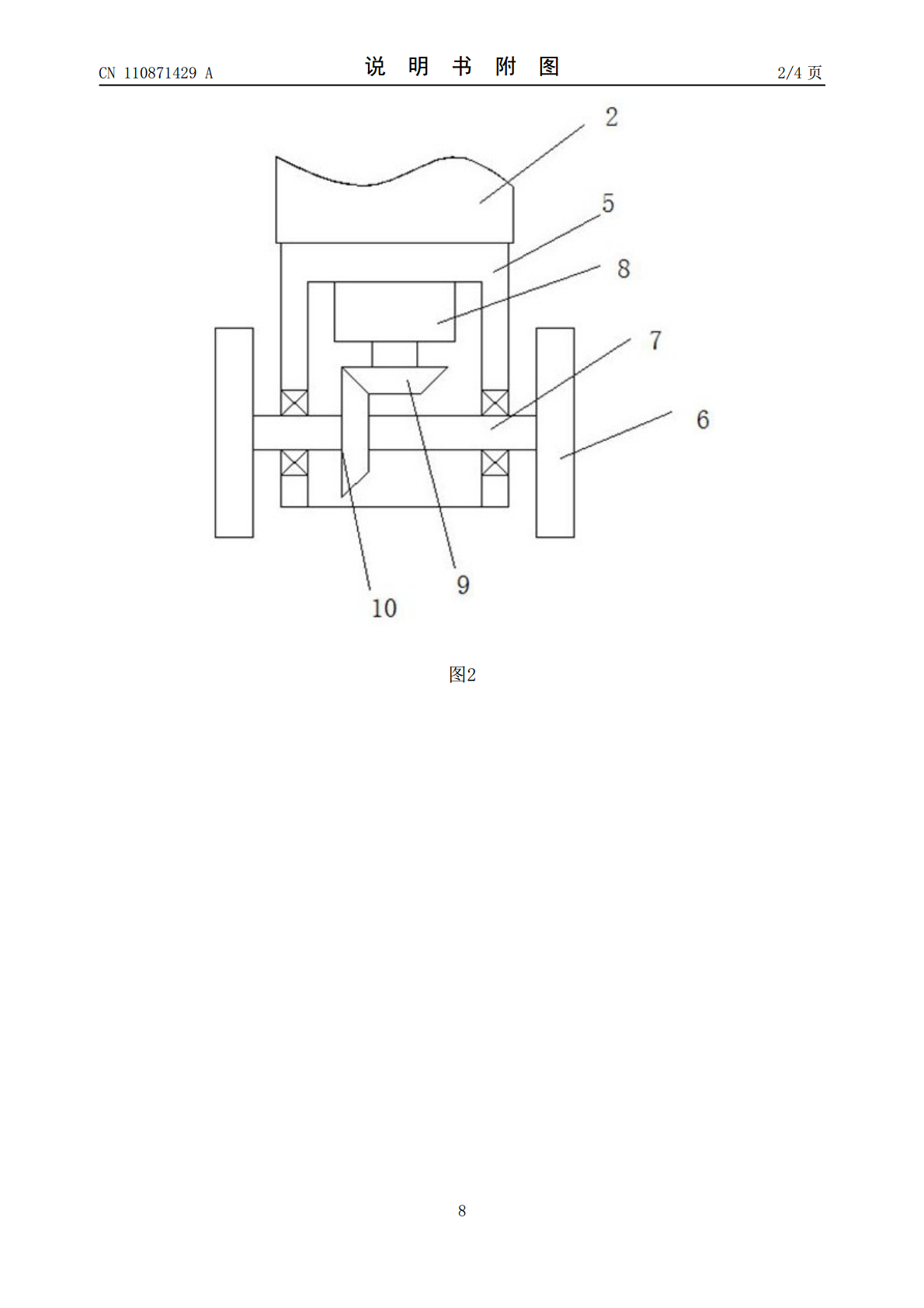
本发明公开了一种可移动式工业教学机器人,包括机器人本体,所述机器人本体安装在一个收纳箱上,在收纳箱顶板开有一个矩形孔,矩形孔内设有一根横轴,横轴两端固定在矩形孔两侧的顶板上,在收纳箱顶板上还设有一个矩形滑槽,所述矩形滑槽一端与矩形孔相连通,另一端延伸至顶板边缘,矩形滑槽内设有匹配的插板,所述机器人本体底部固定在一个安装板上,安装板与矩形孔匹配,且安装板中部设有通孔,横轴设置于通孔内,在收纳箱下方固定一个基座,基座上设有数个移动滚轮。其便于教学机器人的收纳,并且在收纳过程中能够有效避免教学机器人被损坏,提高
一种可避免物体松动坠落的搬运工业机器人及其搬运方法.pdf
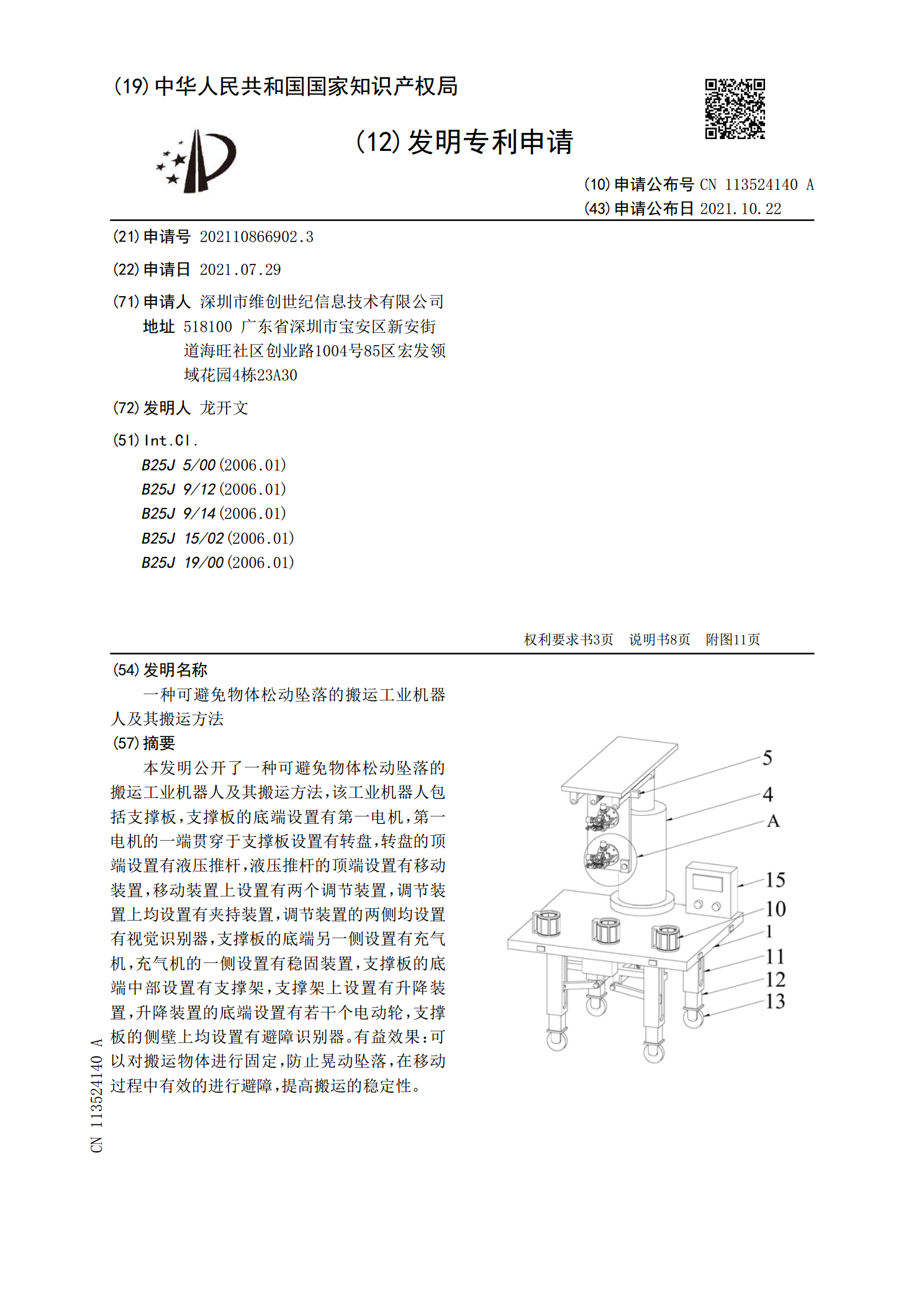
本发明公开了一种可避免物体松动坠落的搬运工业机器人及其搬运方法,该工业机器人包括支撑板,支撑板的底端设置有第一电机,第一电机的一端贯穿于支撑板设置有转盘,转盘的顶端设置有液压推杆,液压推杆的顶端设置有移动装置,移动装置上设置有两个调节装置,调节装置上均设置有夹持装置,调节装置的两侧均设置有视觉识别器,支撑板的底端另一侧设置有充气机,充气机的一侧设置有稳固装置,支撑板的底端中部设置有支撑架,支撑架上设置有升降装置,升降装置的底端设置有若干个电动轮,支撑板的侧壁上均设置有避障识别器。有益效果:可以对搬运物体进

可移动式铸件搬运机器人结构优化与控制研究.docx
可移动式铸件搬运机器人结构优化与控制研究可移动式铸件搬运机器人结构优化与控制研究摘要:随着工业自动化的发展,机器人在工业生产中的应用越来越广泛。特别是在铸造行业,机器人具有独特的优势,能够提高生产效率和质量。本论文针对可移动式铸件搬运机器人的结构优化与控制进行了研究,通过技术经济性分析和系统设计,提出了一种新型的机器人结构,并设计了相应的控制策略,为铸造行业提供了一种新的解决方案。关键词:可移动式铸件搬运机器人、结构优化、控制策略、技术经济性分析、系统设计1.引言铸造行业是一种传统的制造方式,具有工艺复杂
一种工业搬运机器人.pdf
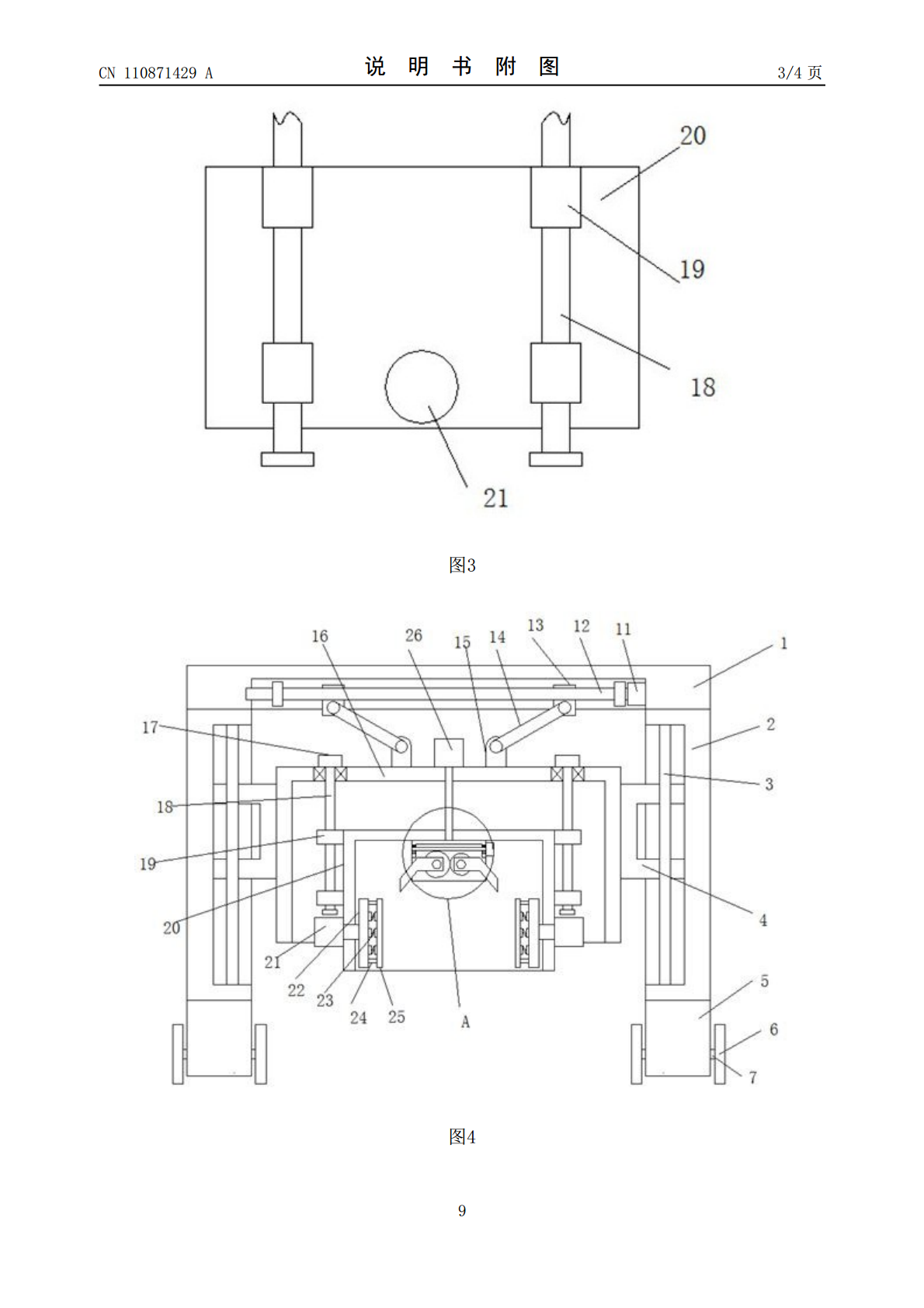
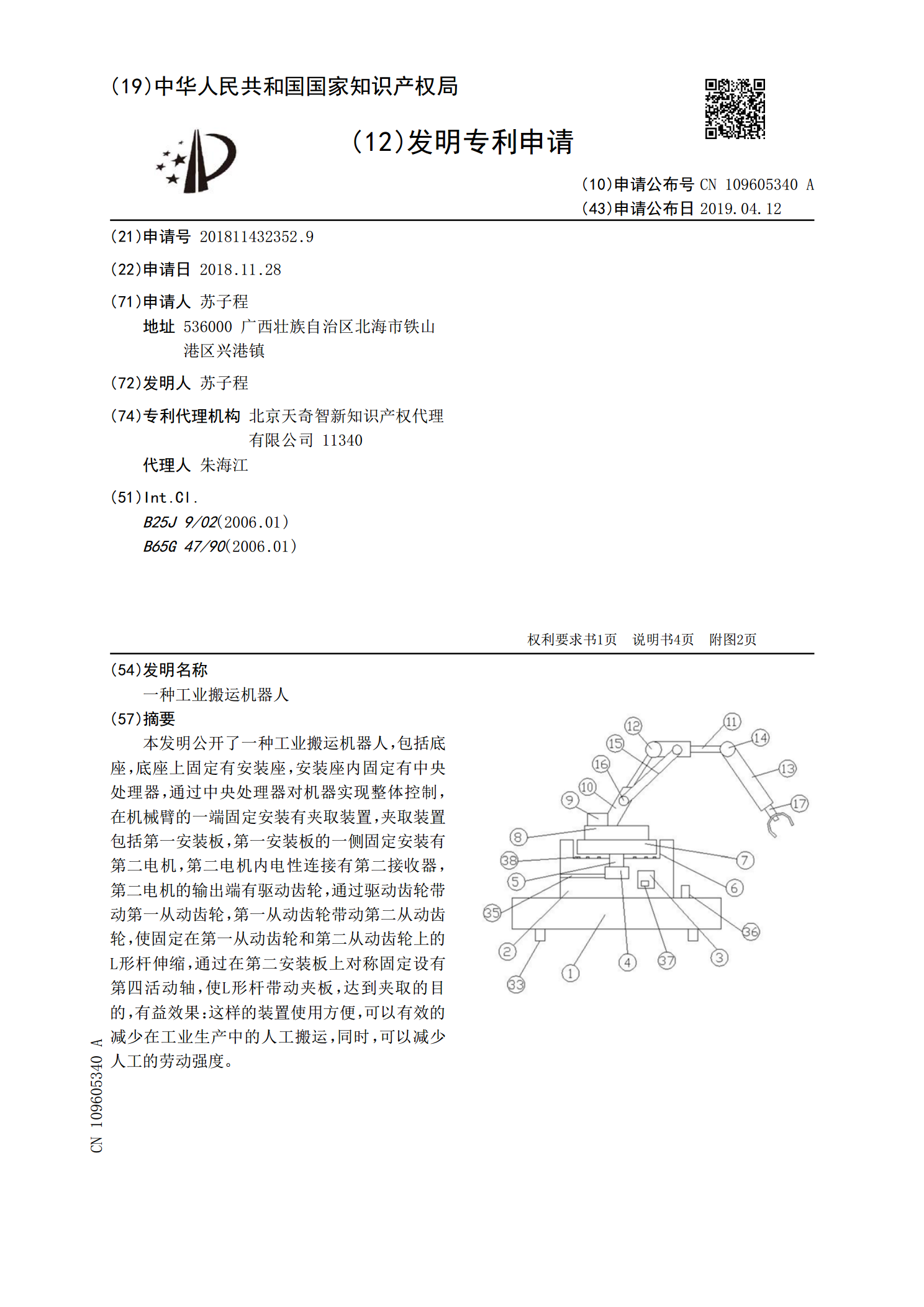
本发明公开了一种工业搬运机器人,包括底座,底座上固定有安装座,安装座内固定有中央处理器,通过中央处理器对机器实现整体控制,在机械臂的一端固定安装有夹取装置,夹取装置包括第一安装板,第一安装板的一侧固定安装有第二电机,第二电机内电性连接有第二接收器,第二电机的输出端有驱动齿轮,通过驱动齿轮带动第一从动齿轮,第一从动齿轮带动第二从动齿轮,使固定在第一从动齿轮和第二从动齿轮上的L形杆伸缩,通过在第二安装板上对称固定设有第四活动轴,使L形杆带动夹板,达到夹取的目的,有益效果:这样的装置使用方便,可以有效的减少在工