
四轮独立驱动电动汽车转向工况下的力矩分配方法.pdf

含平****ng

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
四轮独立驱动电动汽车转向工况下的力矩分配方法.pdf
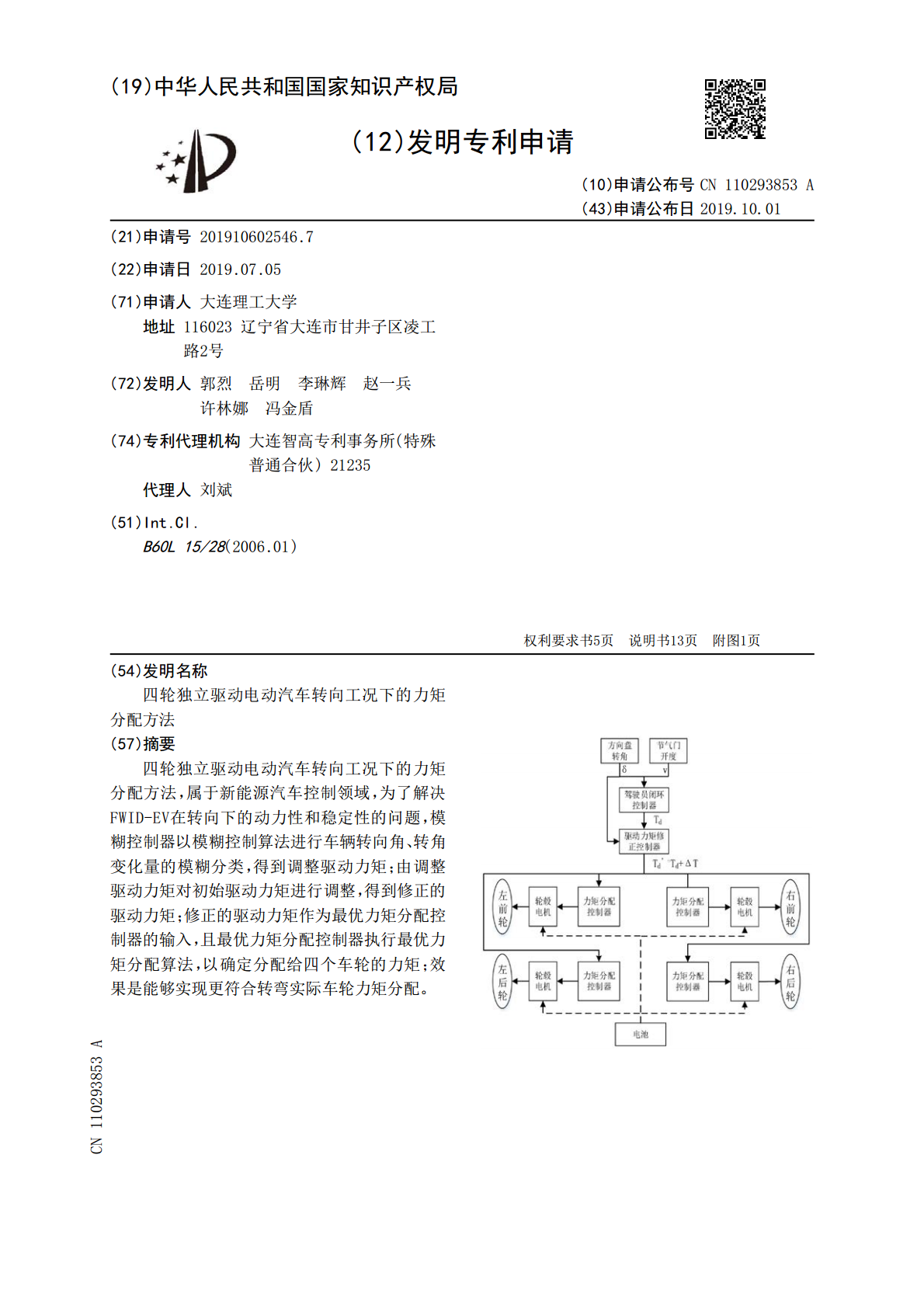
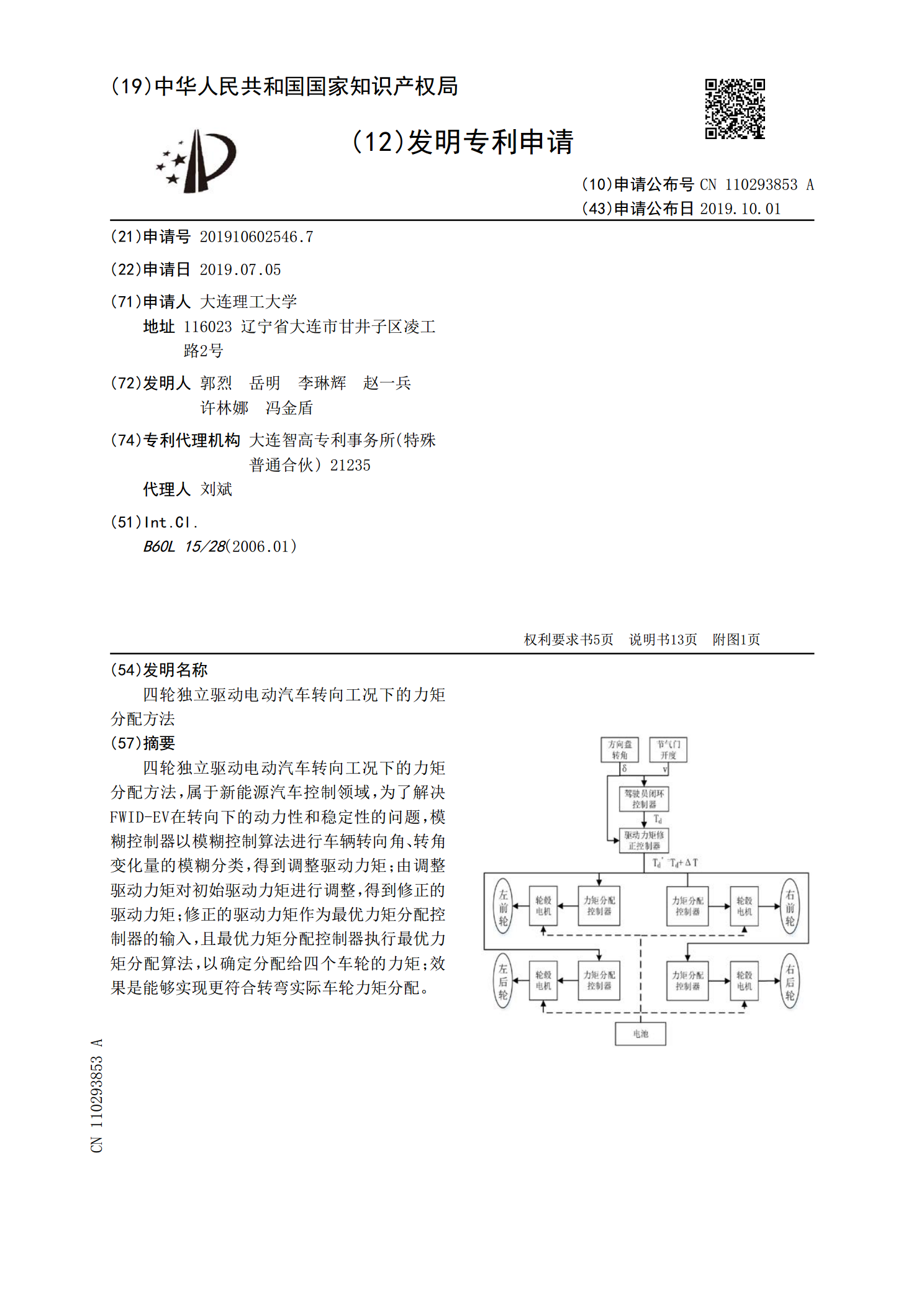
四轮独立驱动电动汽车转向工况下的力矩分配方法,属于新能源汽车控制领域,为了解决FWID‑EV在转向下的动力性和稳定性的问题,模糊控制器以模糊控制算法进行车辆转向角、转角变化量的模糊分类,得到调整驱动力矩;由调整驱动力矩对初始驱动力矩进行调整,得到修正的驱动力矩;修正的驱动力矩作为最优力矩分配控制器的输入,且最优力矩分配控制器执行最优力矩分配算法,以确定分配给四个车轮的力矩;效果是能够实现更符合转弯实际车轮力矩分配。

四轮独立驱动电动汽车自适应巡航控制系统力矩分配方法.pdf
本发明公开了一种四轮独立驱动电动汽车自适应巡航控制系统力矩分配方法,由上层控制方法计算出理想加速度指令并输入到下层控制方法中,下层控制方法根据上层控制方法计算的理想加速度指令计算理想驱动力矩并分配力矩到四个车轮,解决了传统的自适应巡航控制系统无法直接应用于四轮独立驱动电动汽车的问题。上层控制方法采用柔滑约束的模型预测控制,提高了自适应巡航控制系统的实用性,满足了驾驶员所需的安全性、舒适性和经济性的要求。下层控制方法采用模糊控制得到理想纵向力矩并按照垂直载荷大小比例分配力矩到四个车轮,在保证四轮独立驱动电动
双侧独立电驱动履带车转向制动工况下轨迹保持方法.pdf
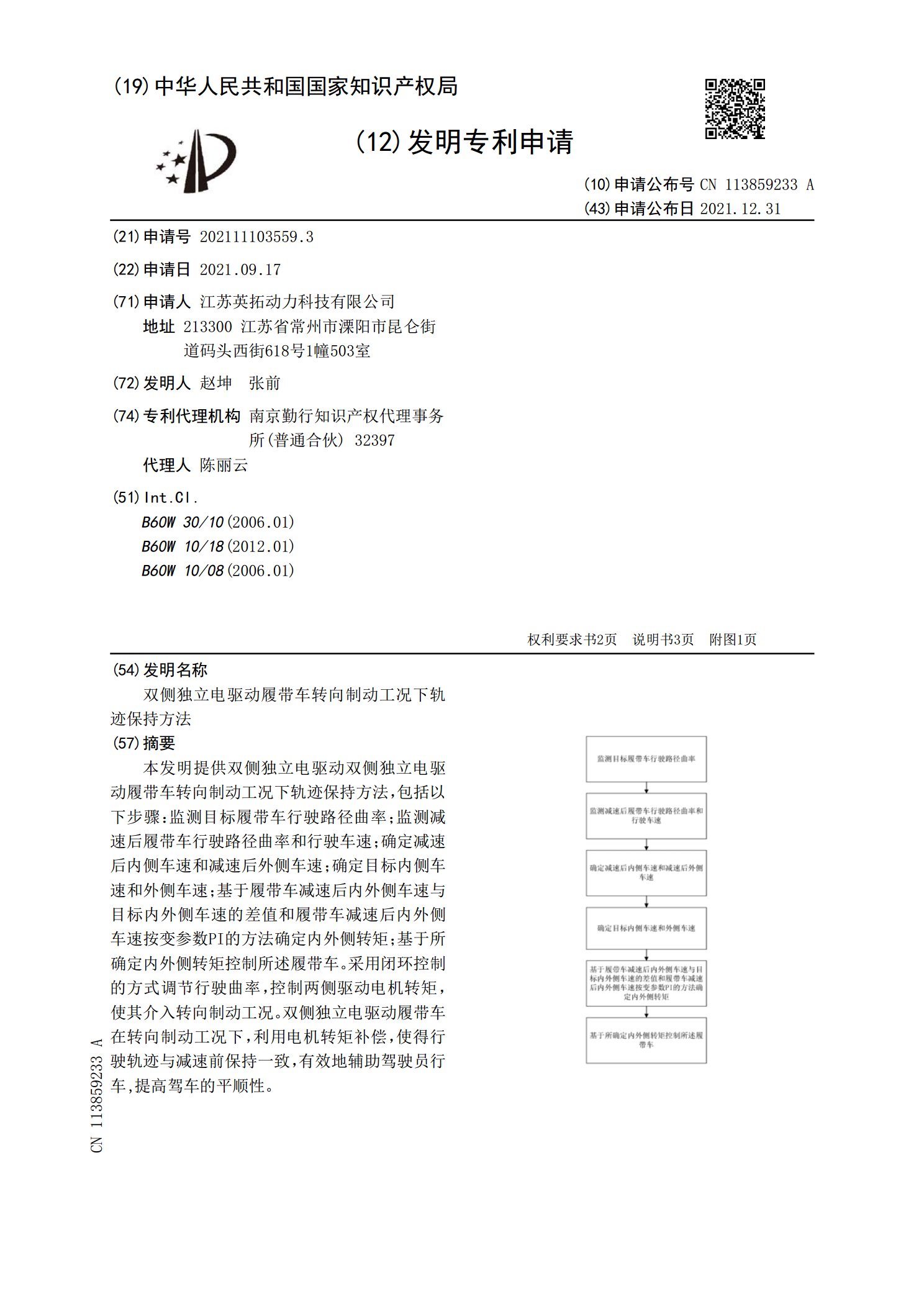
本发明提供双侧独立电驱动双侧独立电驱动履带车转向制动工况下轨迹保持方法,包括以下步骤:监测目标履带车行驶路径曲率;监测减速后履带车行驶路径曲率和行驶车速;确定减速后内侧车速和减速后外侧车速;确定目标内侧车速和外侧车速;基于履带车减速后内外侧车速与目标内外侧车速的差值和履带车减速后内外侧车速按变参数PI的方法确定内外侧转矩;基于所确定内外侧转矩控制所述履带车。采用闭环控制的方式调节行驶曲率,控制两侧驱动电机转矩,使其介入转向制动工况。双侧独立电驱动履带车在转向制动工况下,利用电机转矩补偿,使得行驶轨迹与减速

各轮独立转向及驱动的电动汽车及其转向与驱动控制方法.pdf
一种各轮独立转向及驱动的电动汽车及其转向与驱动方法,该电动汽车包括车身、悬架系统、车轮转向系统、若干个车轮总成及驱动控制系统。车轮转向系统包括转向操纵装置、转向控制子系统及数量与车轮总成相同且通过悬架系统装于车身上的转向机构,悬架系统外侧及前后两端留有避位空间,各转向机构包括主销杆及车轮轴,转向控制子系统包括转向控制器、设于主销杆顶端且与主销杆传动连接的转向舵机及转向传感器;各车轮总成包括装于车轮轴上的车轮及轮毂电机;驱动控制系统包括车速控制踏板及控制轮毂电机的驱动控制器。本发明在各车轮处均装有转向舵机及
电动汽车四轮独立驱动独立转向执行机构及执行方法.pdf
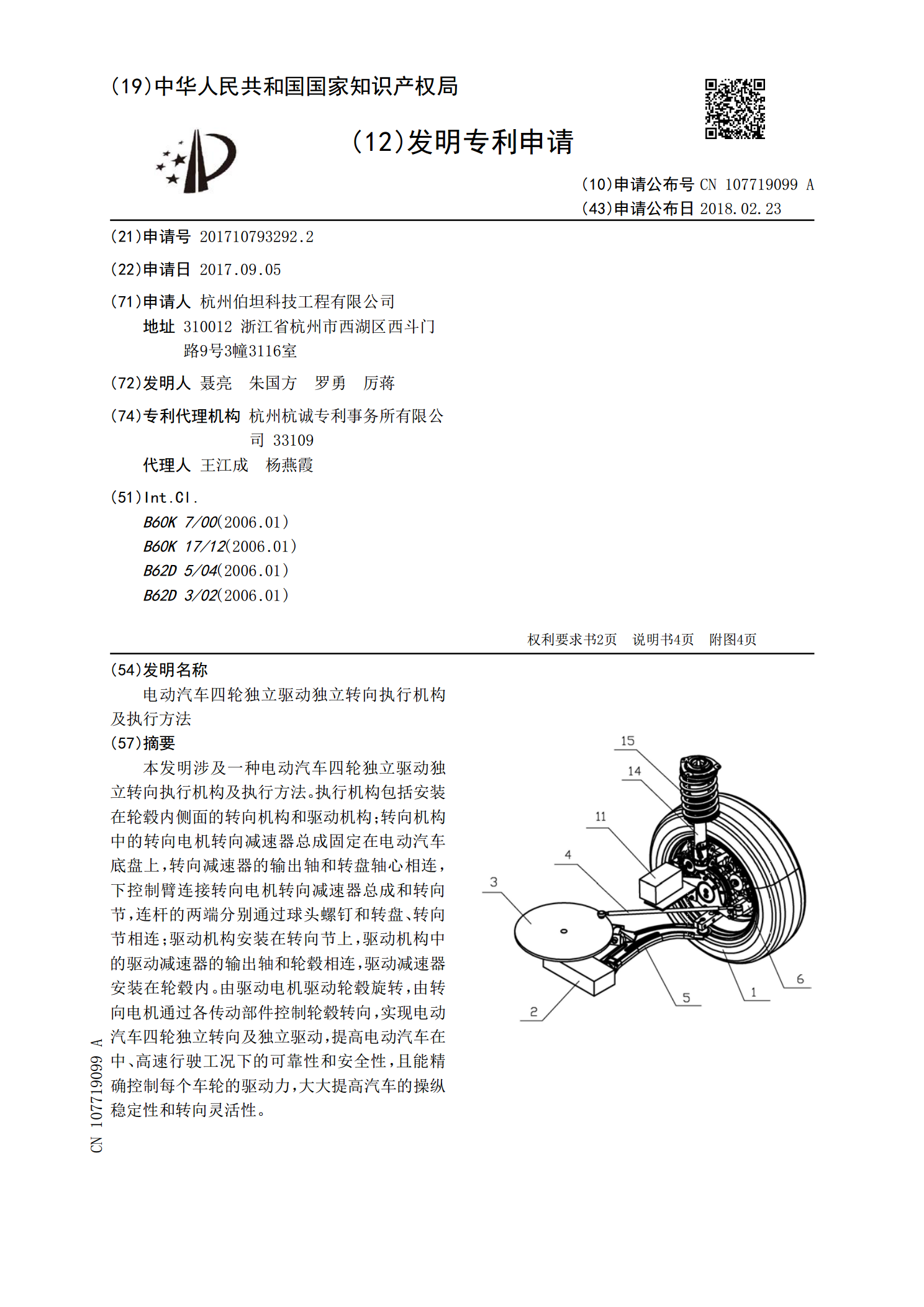
本发明涉及一种电动汽车四轮独立驱动独立转向执行机构及执行方法。执行机构包括安装在轮毂内侧面的转向机构和驱动机构;转向机构中的转向电机转向减速器总成固定在电动汽车底盘上,转向减速器的输出轴和转盘轴心相连,下控制臂连接转向电机转向减速器总成和转向节,连杆的两端分别通过球头螺钉和转盘、转向节相连;驱动机构安装在转向节上,驱动机构中的驱动减速器的输出轴和轮毂相连,驱动减速器安装在轮毂内。由驱动电机驱动轮毂旋转,由转向电机通过各传动部件控制轮毂转向,实现电动汽车四轮独立转向及独立驱动,提高电动汽车在中、高速行驶工况