
航迹推算定位方法及自动泊车系统.pdf

一只****iu


1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
航迹推算定位方法及自动泊车系统.pdf
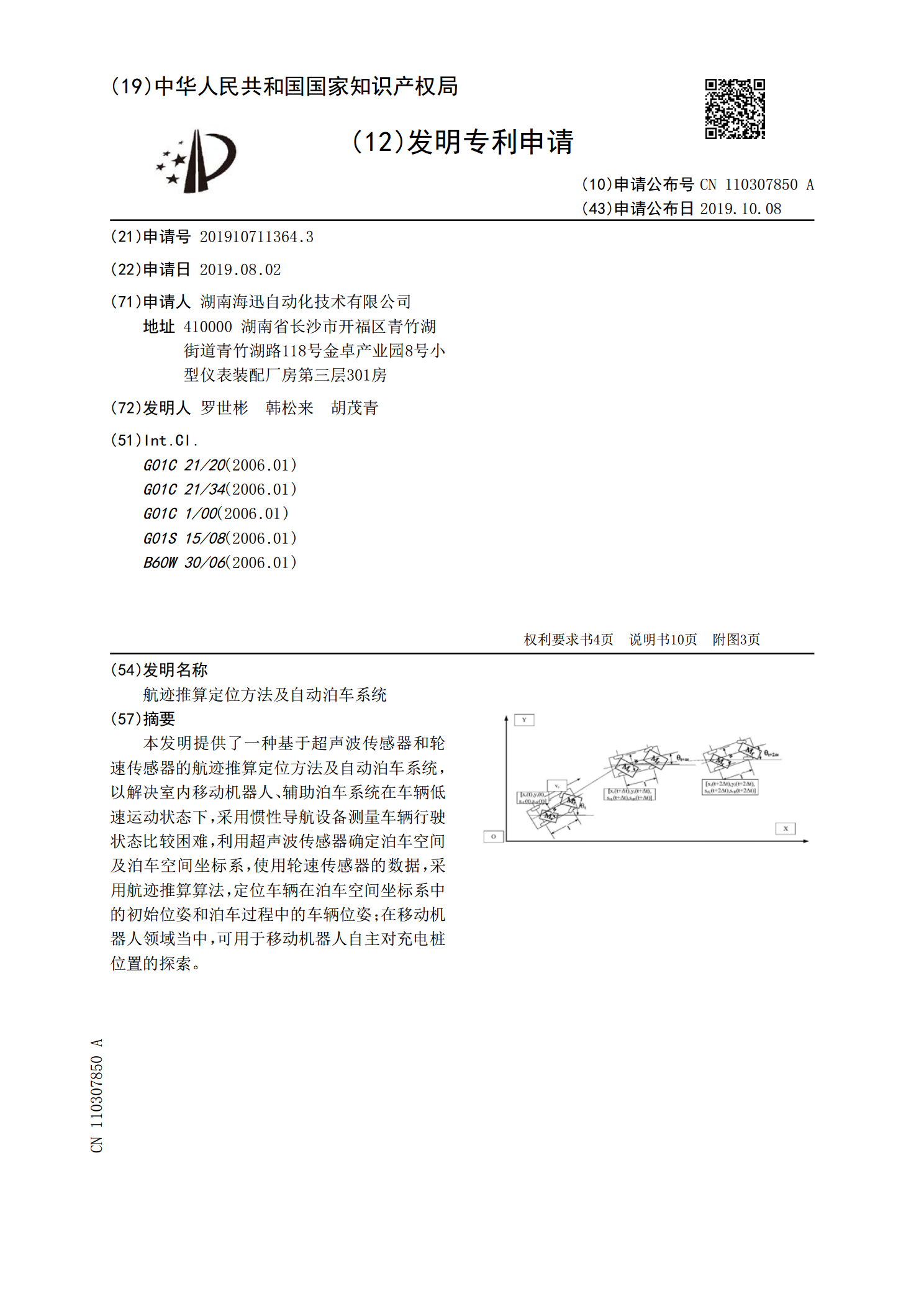
本发明提供了一种基于超声波传感器和轮速传感器的航迹推算定位方法及自动泊车系统,以解决室内移动机器人、辅助泊车系统在车辆低速运动状态下,采用惯性导航设备测量车辆行驶状态比较困难,利用超声波传感器确定泊车空间及泊车空间坐标系,使用轮速传感器的数据,采用航迹推算算法,定位车辆在泊车空间坐标系中的初始位姿和泊车过程中的车辆位姿;在移动机器人领域当中,可用于移动机器人自主对充电桩位置的探索。

基于航迹推算的移动式机器人定位系统设计.docx
基于航迹推算的移动式机器人定位系统设计标题:基于航迹推算的移动式机器人定位系统设计摘要:移动机器人定位是智能机器人领域中的关键技术之一,对于机器人导航和任务执行具有重要意义。本论文提出了一种基于航迹推算的移动式机器人定位系统,通过对机器人的航迹数据进行处理和分析,实现对机器人在未知环境中的精确定位。论文首先介绍了机器人定位的研究背景和意义,然后详细阐述了系统的设计思路和关键技术,包括航迹数据采集,航迹推算算法,定位误差修正等,最后通过实验验证了该系统的性能和有效性。关键词:移动机器人;定位系统;航迹推算;
自动泊车系统、自动泊车方法以及存储介质.pdf
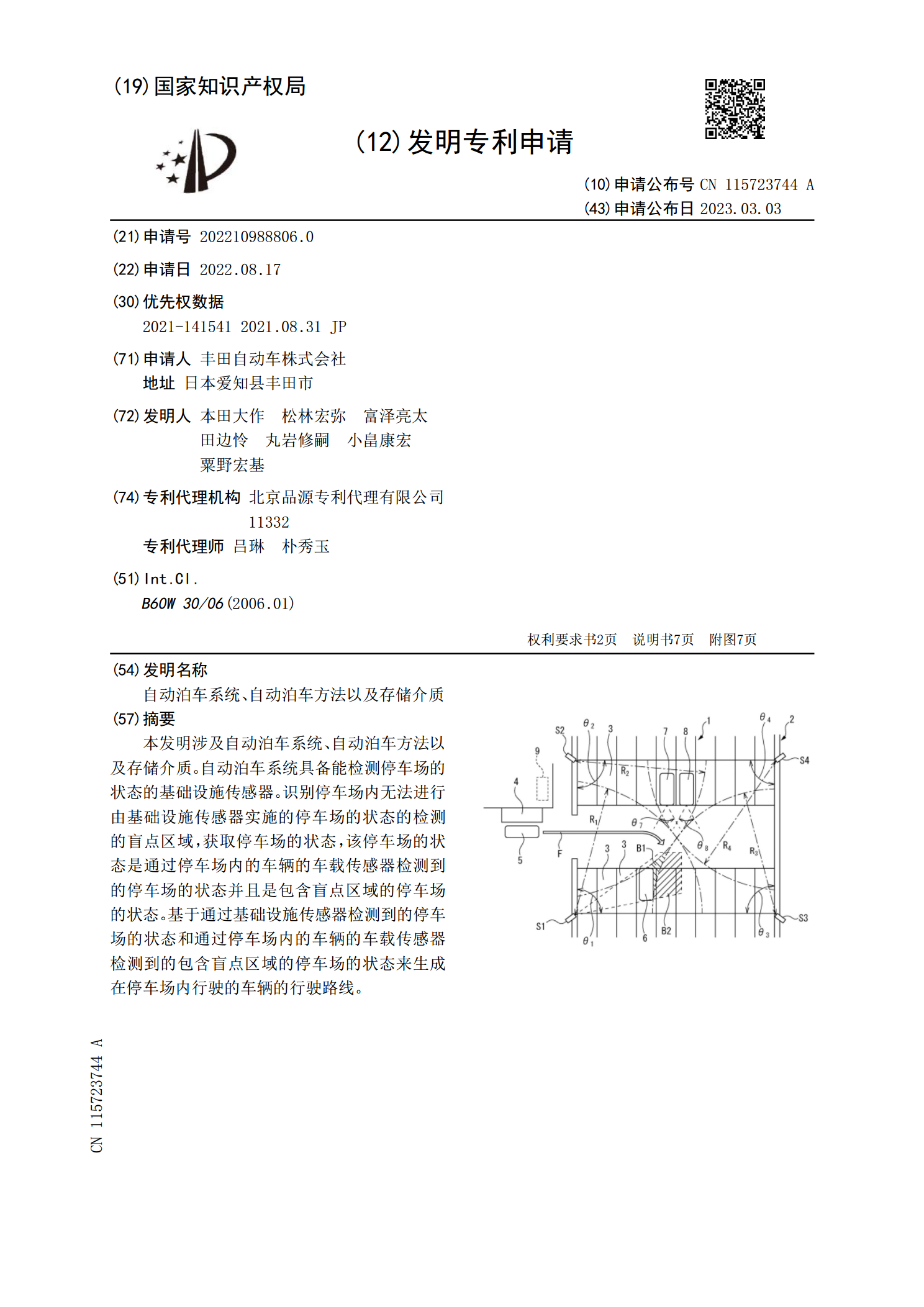
本发明涉及自动泊车系统、自动泊车方法以及存储介质。自动泊车系统具备能检测停车场的状态的基础设施传感器。识别停车场内无法进行由基础设施传感器实施的停车场的状态的检测的盲点区域,获取停车场的状态,该停车场的状态是通过停车场内的车辆的车载传感器检测到的停车场的状态并且是包含盲点区域的停车场的状态。基于通过基础设施传感器检测到的停车场的状态和通过停车场内的车辆的车载传感器检测到的包含盲点区域的停车场的状态来生成在停车场内行驶的车辆的行驶路线。

一种基于空间地图的自动泊车定位方法及系统.pdf
本发明公开了一种基于空间地图的自动泊车定位方法及系统,本发明通过实时的车速和方向盘转角信息,计算出自车的相对位置,从而构造出以自车为基准的二维空间地图,同时将自车传感器的感知数据做投影,映射到该空间地图中,实现自车与周边环境的同步关联,从而从根本上解决泊车过程中的定位问题。由于车辆大部分均安装相机和超声波雷达,因此对于目前的大部分车辆而言,本发明可以不用新增设备,解决了泊车路线与避障的时空不一致带来的偏差问题,使得整个泊车过程较为平滑,反复试验后的空间地图信息维度只有51m*30m,满足了泊车的需求,又最
自主泊车定位方法及定位系统.pdf
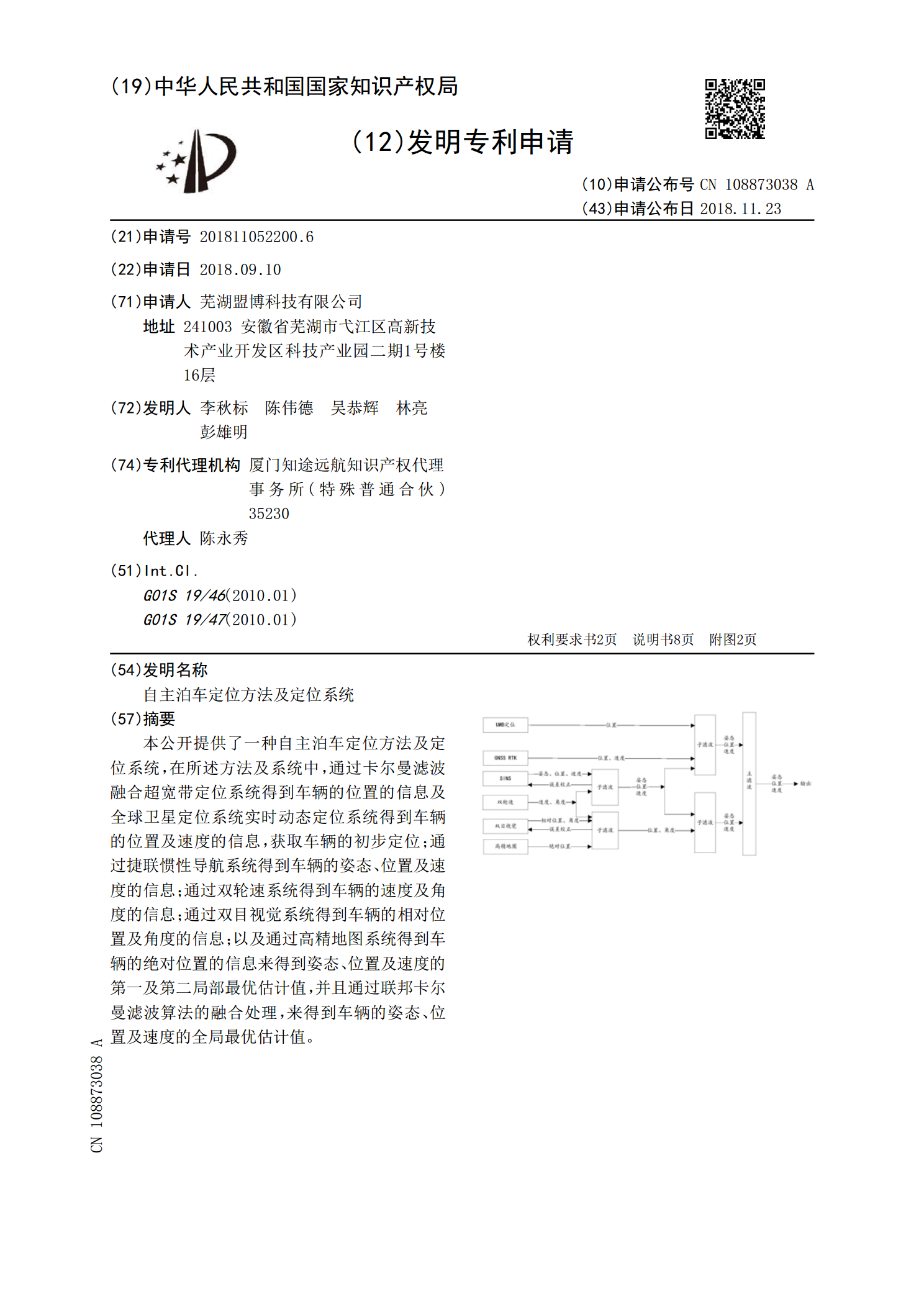
本公开提供了一种自主泊车定位方法及定位系统,在所述方法及系统中,通过卡尔曼滤波融合超宽带定位系统得到车辆的位置的信息及全球卫星定位系统实时动态定位系统得到车辆的位置及速度的信息,获取车辆的初步定位;通过捷联惯性导航系统得到车辆的姿态、位置及速度的信息;通过双轮速系统得到车辆的速度及角度的信息;通过双目视觉系统得到车辆的相对位置及角度的信息;以及通过高精地图系统得到车辆的绝对位置的信息来得到姿态、位置及速度的第一及第二局部最优估计值,并且通过联邦卡尔曼滤波算法的融合处理,来得到车辆的姿态、位置及速度的全局最