
基于航迹推算的移动式机器人定位系统设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于航迹推算的移动式机器人定位系统设计.docx
基于航迹推算的移动式机器人定位系统设计标题:基于航迹推算的移动式机器人定位系统设计摘要:移动机器人定位是智能机器人领域中的关键技术之一,对于机器人导航和任务执行具有重要意义。本论文提出了一种基于航迹推算的移动式机器人定位系统,通过对机器人的航迹数据进行处理和分析,实现对机器人在未知环境中的精确定位。论文首先介绍了机器人定位的研究背景和意义,然后详细阐述了系统的设计思路和关键技术,包括航迹数据采集,航迹推算算法,定位误差修正等,最后通过实验验证了该系统的性能和有效性。关键词:移动机器人;定位系统;航迹推算;
航迹推算定位方法及自动泊车系统.pdf
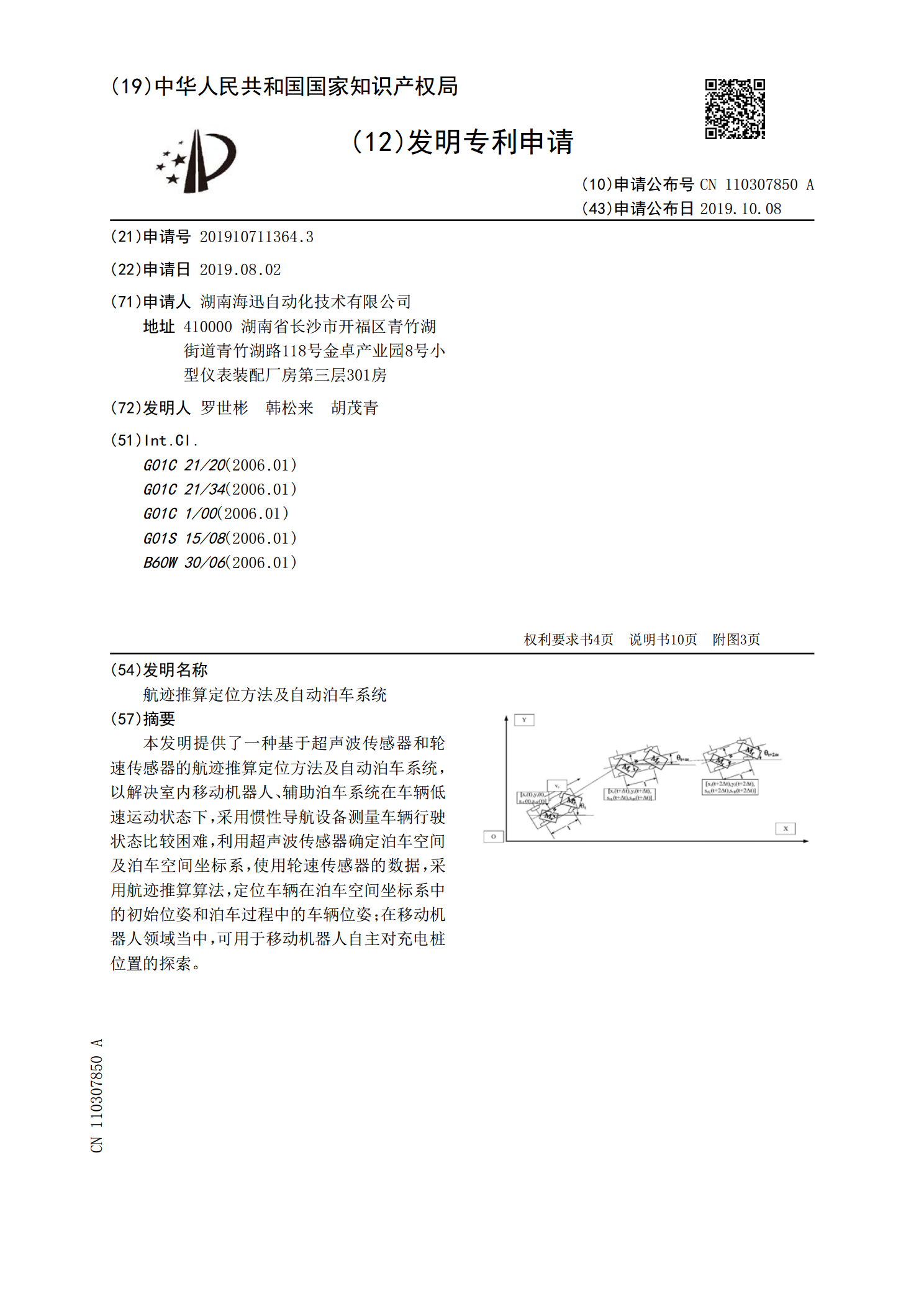
本发明提供了一种基于超声波传感器和轮速传感器的航迹推算定位方法及自动泊车系统,以解决室内移动机器人、辅助泊车系统在车辆低速运动状态下,采用惯性导航设备测量车辆行驶状态比较困难,利用超声波传感器确定泊车空间及泊车空间坐标系,使用轮速传感器的数据,采用航迹推算算法,定位车辆在泊车空间坐标系中的初始位姿和泊车过程中的车辆位姿;在移动机器人领域当中,可用于移动机器人自主对充电桩位置的探索。

基于航迹推算的全向移动机器人定位及磁导航的研究的任务书.docx
基于航迹推算的全向移动机器人定位及磁导航的研究的任务书任务书一、任务背景和目的全向移动机器人是一种能够在任意方向上运动的机器人,它由多个轮子组成,能够实现平移、旋转等多种运动方式,广泛应用于制造业、医疗、安防等领域。然而,全向移动机器人在室内定位和导航方面还存在一些难题,如何精确地定位机器人的位置,如何在室内环境中实现准确导航等问题亟待解决。本研究旨在基于航迹推算的方法,研究全向移动机器人的定位问题,在此基础上探讨磁导航在机器人导航中的应用。二、研究内容和研究方法1.研究内容(1)全向移动机器人的轨迹推算
一种基于运动分解的移动机器人航迹推算定位方法.pdf
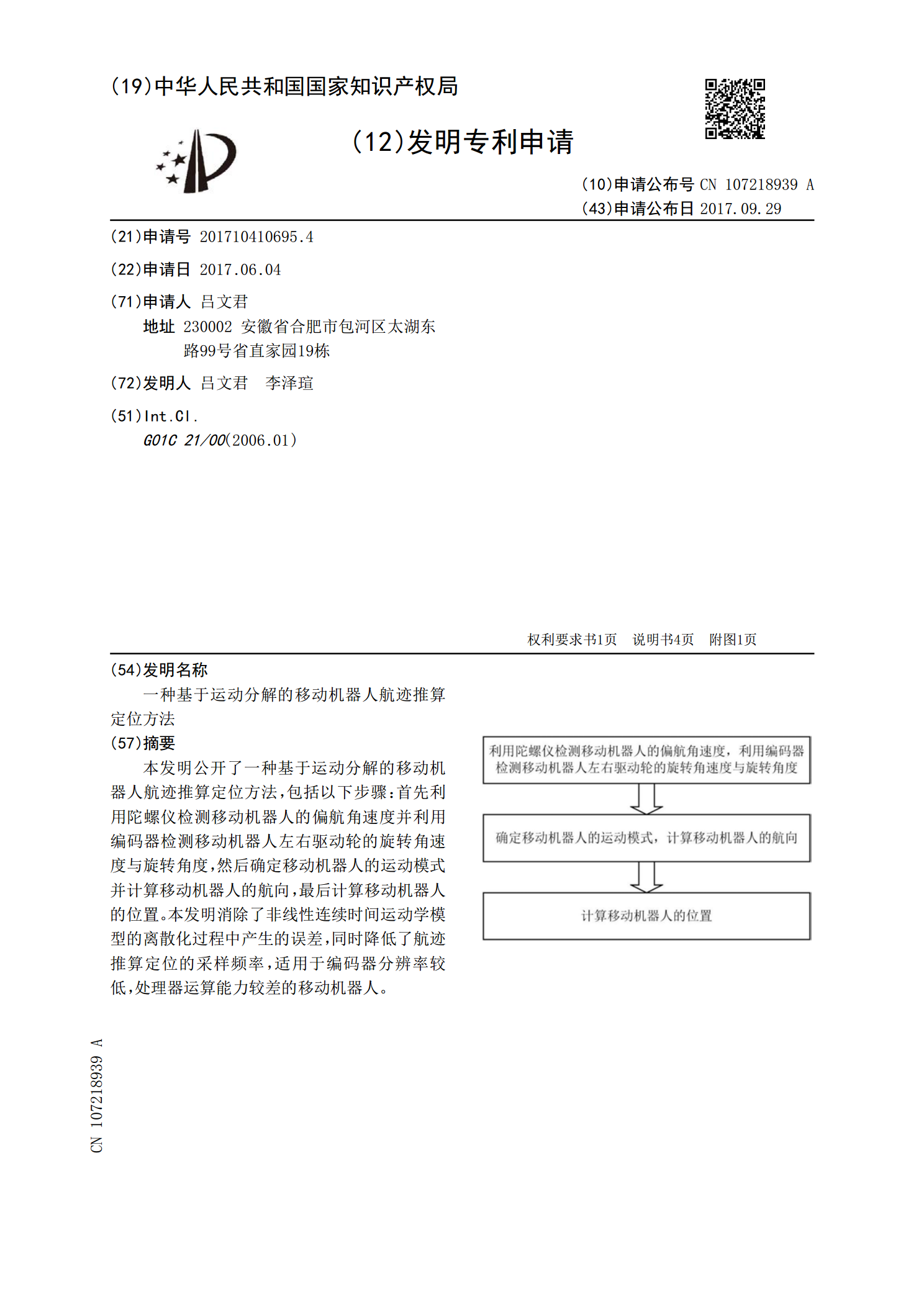
本发明公开了一种基于运动分解的移动机器人航迹推算定位方法,包括以下步骤:首先利用陀螺仪检测移动机器人的偏航角速度并利用编码器检测移动机器人左右驱动轮的旋转角速度与旋转角度,然后确定移动机器人的运动模式并计算移动机器人的航向,最后计算移动机器人的位置。本发明消除了非线性连续时间运动学模型的离散化过程中产生的误差,同时降低了航迹推算定位的采样频率,适用于编码器分辨率较低,处理器运算能力较差的移动机器人。

三轮全向移动机器人的航迹推算定位方法.docx
三轮全向移动机器人的航迹推算定位方法标题:三轮全向移动机器人的航迹推算定位方法摘要:在现代工业与服务领域,移动机器人扮演着重要的角色。然而,准确而高效的定位对于机器人的导航和路径规划至关重要。本论文研究了三轮全向移动机器人的航迹推算定位方法,结合传感器数据和运动模型,提出了一种基于卡尔曼滤波的定位算法,并通过实验验证了其性能。引言:随着科技的发展,移动机器人在诸多领域得到了广泛应用,如仓储物流、家庭服务、医疗护理等。移动机器人在复杂环境中导航和定位是其基本功能,而全向移动机器人由于其良好的机动性能和操控性