
一种基于空间地图的自动泊车定位方法及系统.pdf

一条****杉淑


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于空间地图的自动泊车定位方法及系统.pdf
本发明公开了一种基于空间地图的自动泊车定位方法及系统,本发明通过实时的车速和方向盘转角信息,计算出自车的相对位置,从而构造出以自车为基准的二维空间地图,同时将自车传感器的感知数据做投影,映射到该空间地图中,实现自车与周边环境的同步关联,从而从根本上解决泊车过程中的定位问题。由于车辆大部分均安装相机和超声波雷达,因此对于目前的大部分车辆而言,本发明可以不用新增设备,解决了泊车路线与避障的时空不一致带来的偏差问题,使得整个泊车过程较为平滑,反复试验后的空间地图信息维度只有51m*30m,满足了泊车的需求,又最
航迹推算定位方法及自动泊车系统.pdf
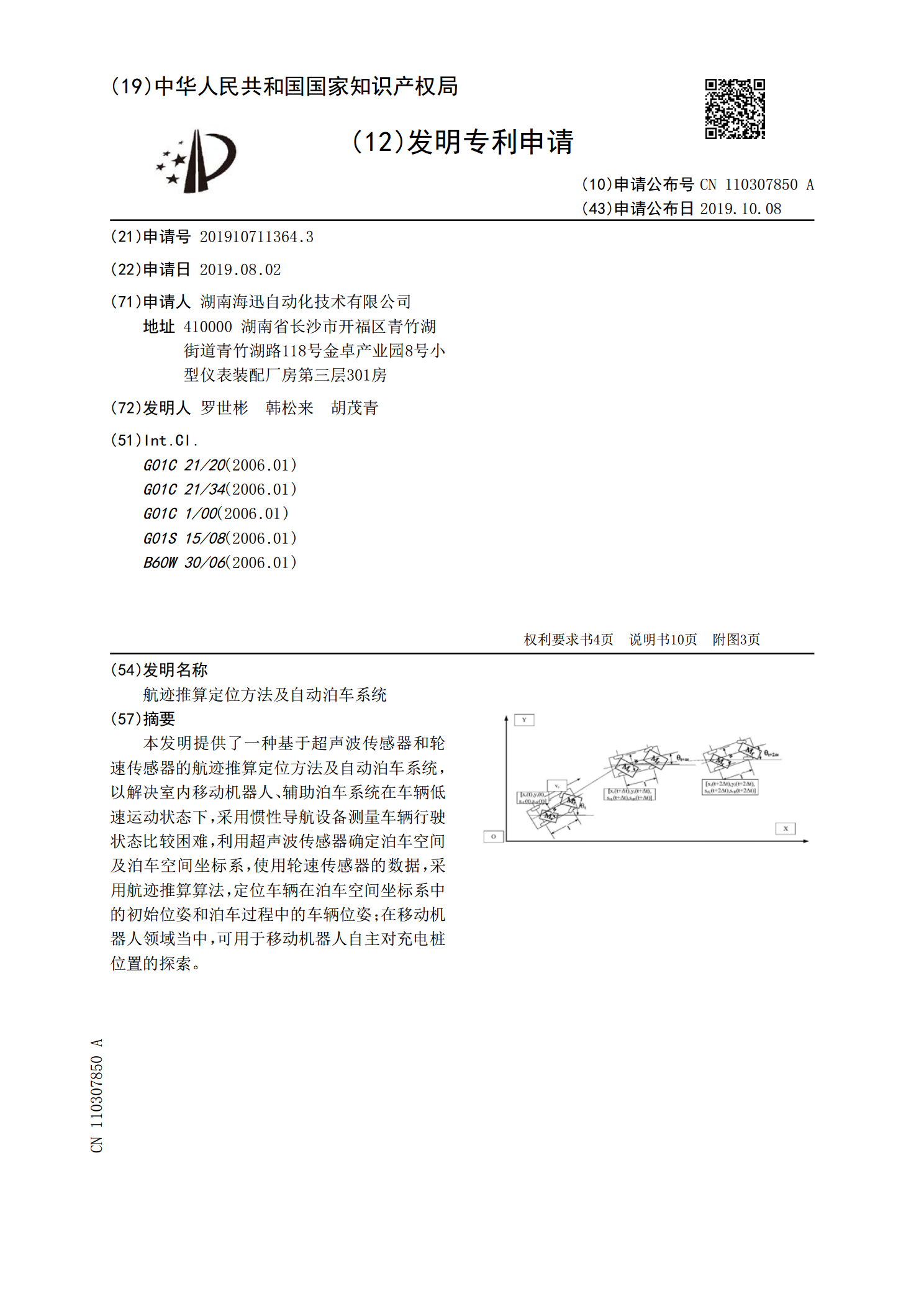
本发明提供了一种基于超声波传感器和轮速传感器的航迹推算定位方法及自动泊车系统,以解决室内移动机器人、辅助泊车系统在车辆低速运动状态下,采用惯性导航设备测量车辆行驶状态比较困难,利用超声波传感器确定泊车空间及泊车空间坐标系,使用轮速传感器的数据,采用航迹推算算法,定位车辆在泊车空间坐标系中的初始位姿和泊车过程中的车辆位姿;在移动机器人领域当中,可用于移动机器人自主对充电桩位置的探索。

一种基于空间定位的车辆自动防护方法及系统.pdf
本发明涉及个人快速交通技术领域,具体公开了一种基于空间定位的车辆自动防护方法及系统。方法步骤包括:S1,在导轨沿线设置无线网络定位节点,并在PRT车辆上设置车载无线通信模块;S2,当无线网络定位节点与车载无线通信模块建立通信连接时,计算PRT车辆的位置坐标;S3,根据PRT车辆的位置坐标和预设的虚拟闭塞区间的相对位置关系,确定虚拟闭塞区间的状态;虚拟闭塞区间的状态用于控制PRT车辆的行驶状态,本发明利用无线通信网络实现车辆的实时准确定位,进而判断虚拟闭塞区间的状态,不需要铺设实体线圈代替闭塞区间,减少了土

基于空间位置重构的自动泊车系统研究.doc
基于空间位置重构的自动泊车系统研究自动泊车系统是智能汽车领域逐渐兴起的一个研究热点与难点。自动泊车辅助系统作为自动泊车系统的核心部分,可以帮助驾驶员在狭窄的泊车空间中寻找到合适的车位,并代替驾驶员操纵方向盘沿预定轨迹驶入车位,完成泊车全过程,增加了泊车过程的安全性与舒适性。本文从理论分析到实车应用提出了一套完整的自动泊车辅助系统解决方案。该方案使用超声波测距传感器获取平行泊车位的空间信息,通过对超声波测距的硬件优化设计,得到准确的障碍物距离信息。并基于周边障碍物位置信息,采用泊车空间重构算法进行车辆环境准

基于空间位置重构的自动泊车系统研究.doc
基于空间位置重构的自动泊车系统研究自动泊车系统是智能汽车领域逐渐兴起的一个研究热点与难点。自动泊车辅助系统作为自动泊车系统的核心部分,可以帮助驾驶员在狭窄的泊车空间中寻找到合适的车位,并代替驾驶员操纵方向盘沿预定轨迹驶入车位,完成泊车全过程,增加了泊车过程的安全性与舒适性。本文从理论分析到实车应用提出了一套完整的自动泊车辅助系统解决方案。该方案使用超声波测距传感器获取平行泊车位的空间信息,通过对超声波测距的硬件优化设计,得到准确的障碍物距离信息。并基于周边障碍物位置信息,采用泊车空间重构算法进行车辆环境准