
一种模块化无人艇.pdf

鹏飞****可爱


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种模块化无人艇.pdf
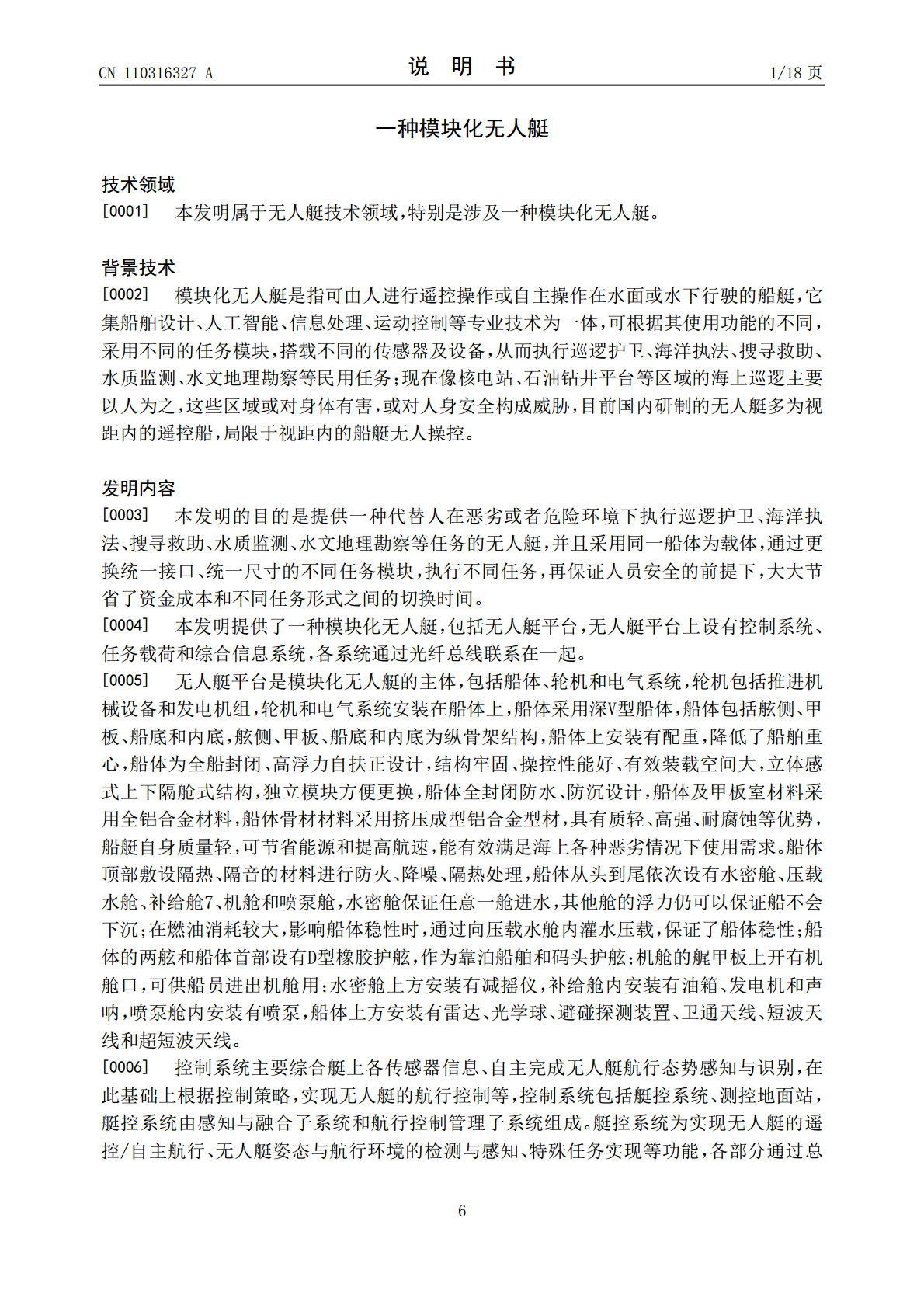
本发明属于无人艇技术领域,公开了一种模块化无人艇,包括无人艇平台,无人艇平台上设有控制系统、任务载荷和综合信息系统,各系统通过光纤总线联系在一起;无人艇平台是模块化无人艇的主体,包括船体、轮机和电气系统,轮机包括推进机械设备和发电机组,轮机和电气系统安装在船体上,船体从头到尾依次设有水密舱、压载水舱、补给舱、机舱和喷泵舱,本发明无人艇采用开放式系统、模块化设计,各型无人艇采用统一的通用艇体平台,艇载任务设备间采用光纤总线结构,各任务设备采用标准化模块结构和通用总线接口形式,通过光纤总线连成统一整体,代替人
一种无人监测艇.pdf
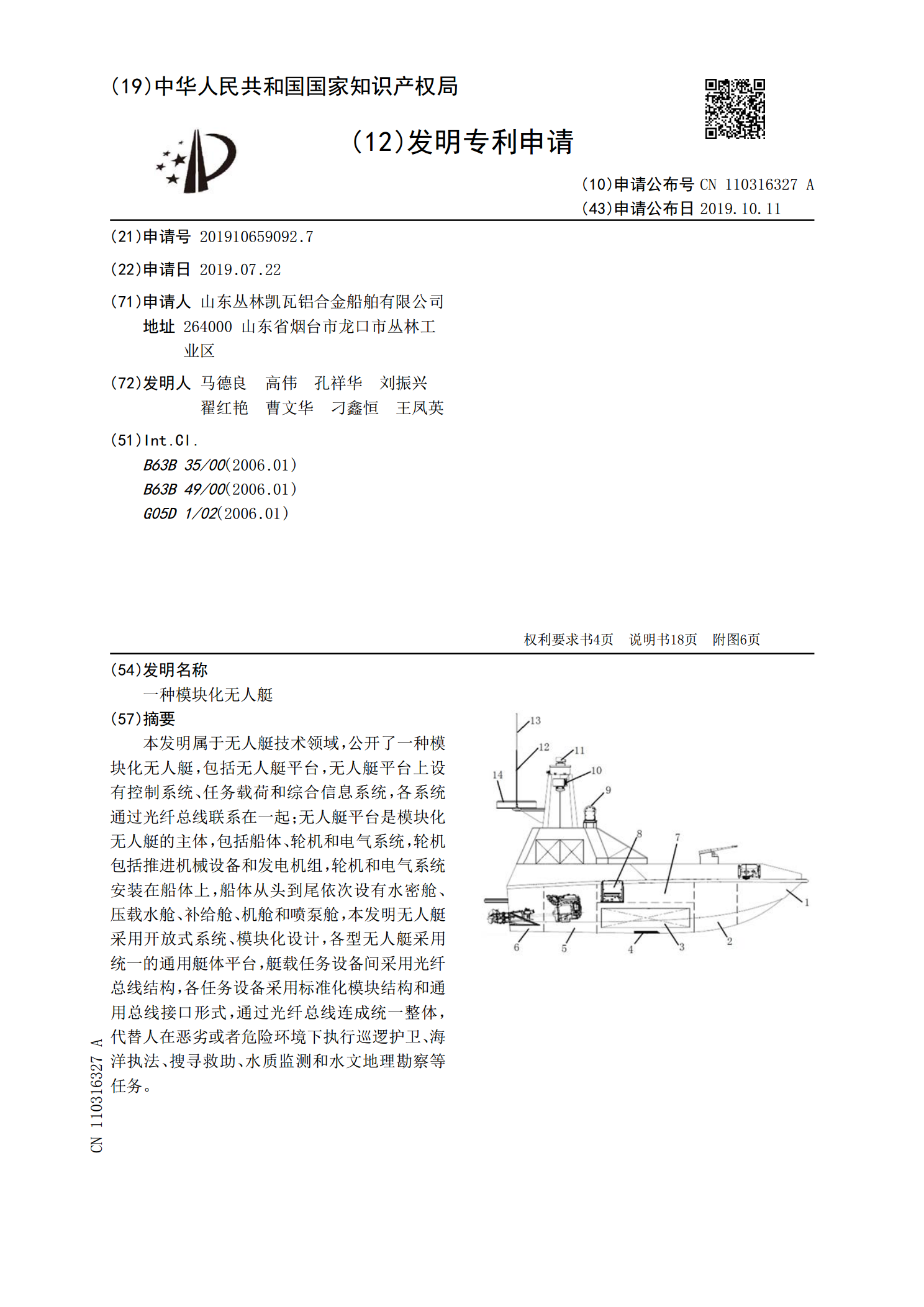
本发明公开了一种无人监测艇。该无人监测艇,包括两个并排设置的片体,两个片体通过连接装置并排固定连接,片体包括推进舱和工作舱,推进舱和工作舱榫式连接,并通过卡接装置固定,推进舱设置有电机,电机连接有桨叶,两个片体内的电机分别通过各自的电调连接有动力电池,两个推进舱内的动力电池并联,两个电调与接收机连接,所述工作舱设置有通信电池,所述的接收机与通信电池连接,还包括设置在无人监测艇顶部的摄像头和图像传输天线,所述摄像头、图像传输天线与通信电池连接,两个工作舱内的通信电池并联。本发明的无人监测艇能够拆解运输,便于
一种可移动无人艇艇架装置.pdf
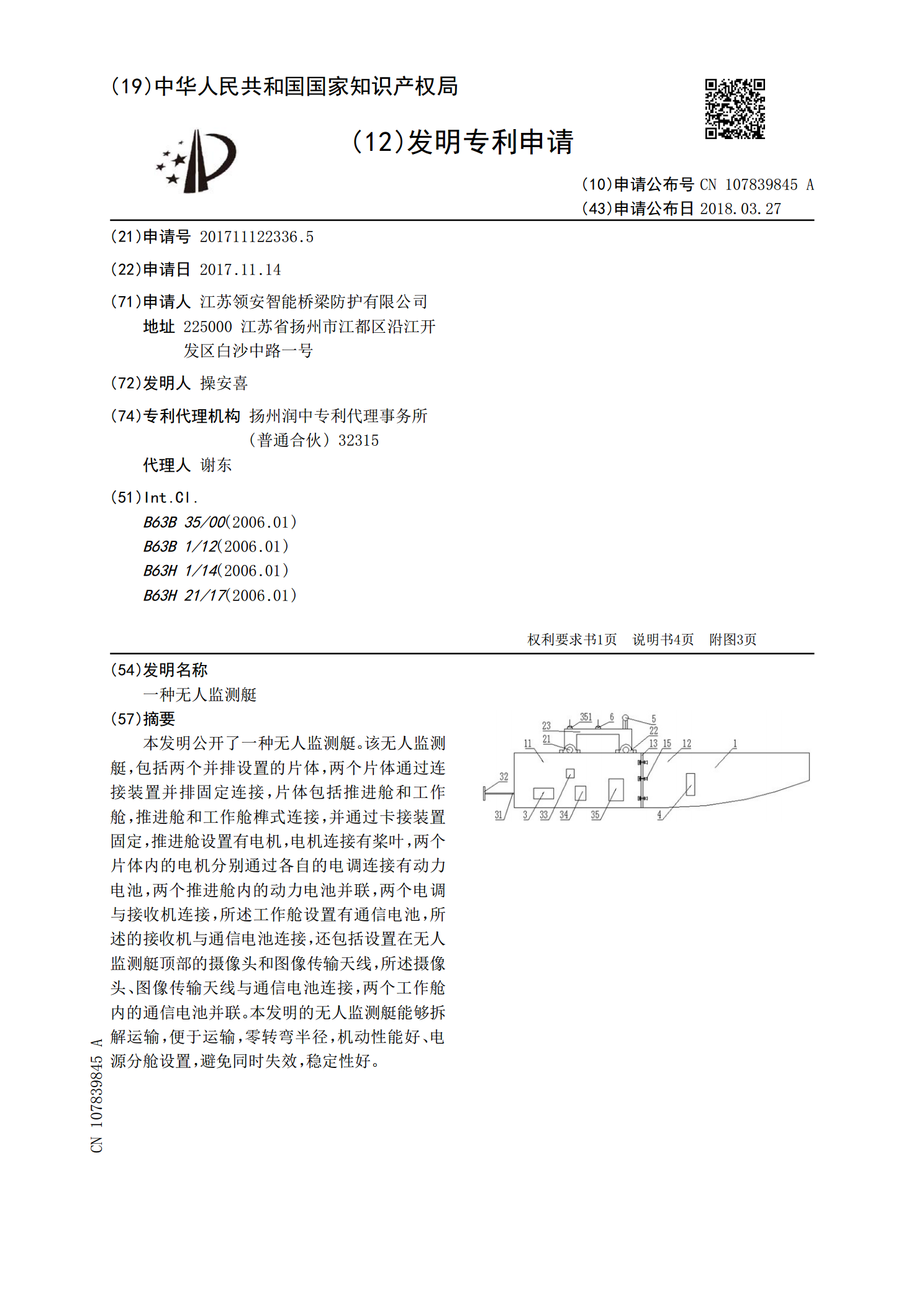
本发明属于无人艇回收技术领域,具体为一种可移动无人艇艇架装置,包括艇架本体,艇架本体的上部的前后端均设置为V型槽,艇架本体的下方设置有万向轮机构,艇架本体的前后侧面均设置有可伸缩的液压驱动撑脚机构,液压驱动撑脚机构的伸缩方向为垂直方向。本发明结构新颖,构思巧妙,不仅能够用于在母船、仓库等各种场所安置无人艇,而且还可以快速移动、运输无人艇,提高了无人艇工作效率、简化无人艇回收、运输的过程,具有方便使用、结构简单、安全可靠等优点,使用效果好。
一种无人水上收油艇.pdf
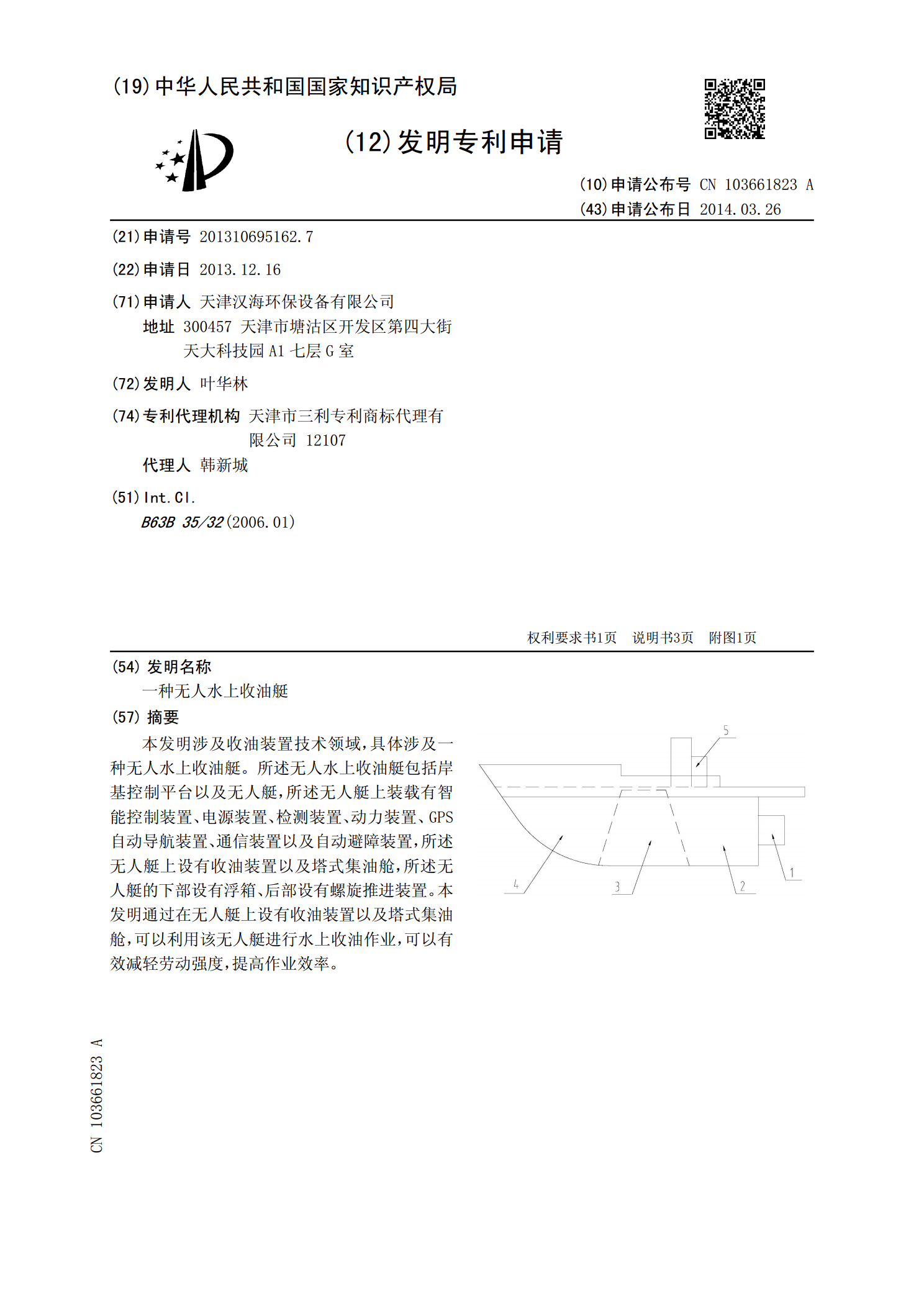
本发明涉及收油装置技术领域,具体涉及一种无人水上收油艇。所述无人水上收油艇包括岸基控制平台以及无人艇,所述无人艇上装载有智能控制装置、电源装置、检测装置、动力装置、GPS自动导航装置、通信装置以及自动避障装置,所述无人艇上设有收油装置以及塔式集油舱,所述无人艇的下部设有浮箱、后部设有螺旋推进装置。本发明通过在无人艇上设有收油装置以及塔式集油舱,可以利用该无人艇进行水上收油作业,可以有效减轻劳动强度,提高作业效率。

一种无人水样采样艇.pdf
本发明公开一种无人水样采样艇,是一种水质采样设备。它包括船体,所述船体由前舱和后舱组合而成,且所述前舱和后舱之间可折叠,所述前舱和后舱之间铰接连接,两舱具有折叠和展开两种相对状态,且在两者之间设有可以使两者保持在折叠状态和展开状态的锁紧机构;所述前舱重量小于后舱重量,使船体在水中时船体与水平面成一定的夹角;所述船体上载有动力系统和取样系统。本发明独特的折叠式船身设计,便于携带和搬运;独特的倾斜船身设计,配合船尾的轮子可以有效的提高无人船的适应能力;采样泵设置在船舱内,避免了采样泵的振动扰动水体,影响采样样