
一种无人水上收油艇.pdf

书生****萌哒

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种无人水上收油艇.pdf
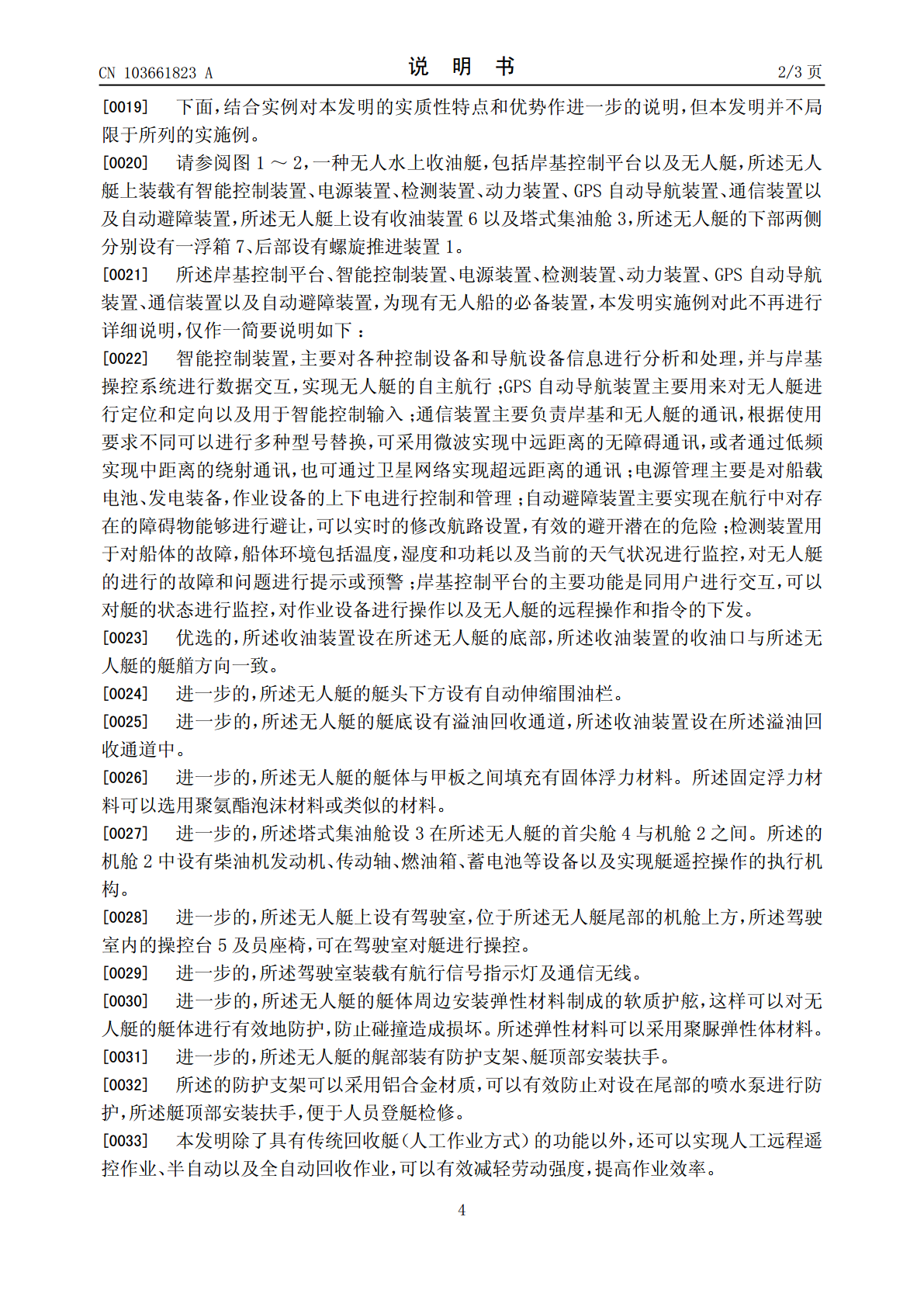
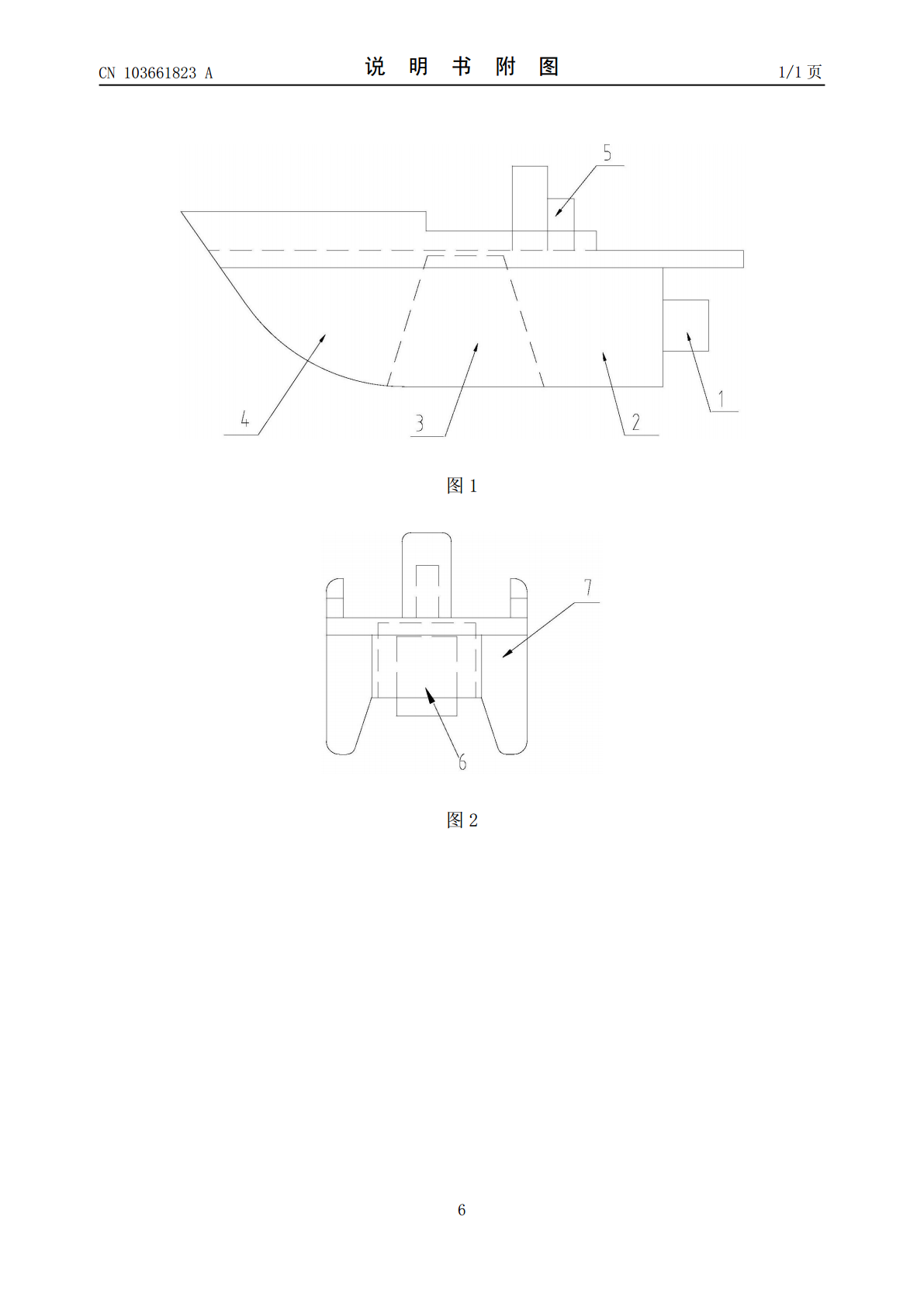
本发明涉及收油装置技术领域,具体涉及一种无人水上收油艇。所述无人水上收油艇包括岸基控制平台以及无人艇,所述无人艇上装载有智能控制装置、电源装置、检测装置、动力装置、GPS自动导航装置、通信装置以及自动避障装置,所述无人艇上设有收油装置以及塔式集油舱,所述无人艇的下部设有浮箱、后部设有螺旋推进装置。本发明通过在无人艇上设有收油装置以及塔式集油舱,可以利用该无人艇进行水上收油作业,可以有效减轻劳动强度,提高作业效率。
一种水上收油机及其收油方法.pdf
本发明提供一种水上收油机,包括回收处理模块、航行模块和航行保障模块;回收处理模块包括本体,本体的前端设有带刮油板的传送带,传送带的末端设有油水分离板;传送带的两侧设有向前伸展成V形的导油臂;本体的上部设有油箱,本体与油箱之间设有油管和用于将传送带上刮下的油从本体经油管抽入油箱中的抽油泵;航行模块采用螺旋桨‑喷水混合推进;航行保障模块包括设置在本体底部的浮球感应装置,浮球感应装置包括海水粘度传感器、空心球体及向球体中注水和排水的水泵。本发明能够在多种溢油环境下高效率的回收溢油和处理事故现场,减少石油对海洋的

水上无人艇目标跟踪控制方法研究.docx
水上无人艇目标跟踪控制方法研究水上无人艇目标跟踪控制方法研究摘要:水上无人艇作为一种重要的机器人技术应用,具有广泛的应用领域。本文主要对水上无人艇目标跟踪控制方法进行研究。首先介绍了水上无人艇的基本工作原理和目标跟踪的重要性。然后,分析了目标跟踪中的挑战和存在的问题。接着,详细介绍了几种常见的水上无人艇目标跟踪控制方法,包括基于计算机视觉的方法、基于传感器的方法和基于深度学习的方法。最后,总结了目标跟踪的研究现状和未来发展趋势。关键词:水上无人艇,目标跟踪,控制方法,计算机视觉,传感器,深度学习1.引言水
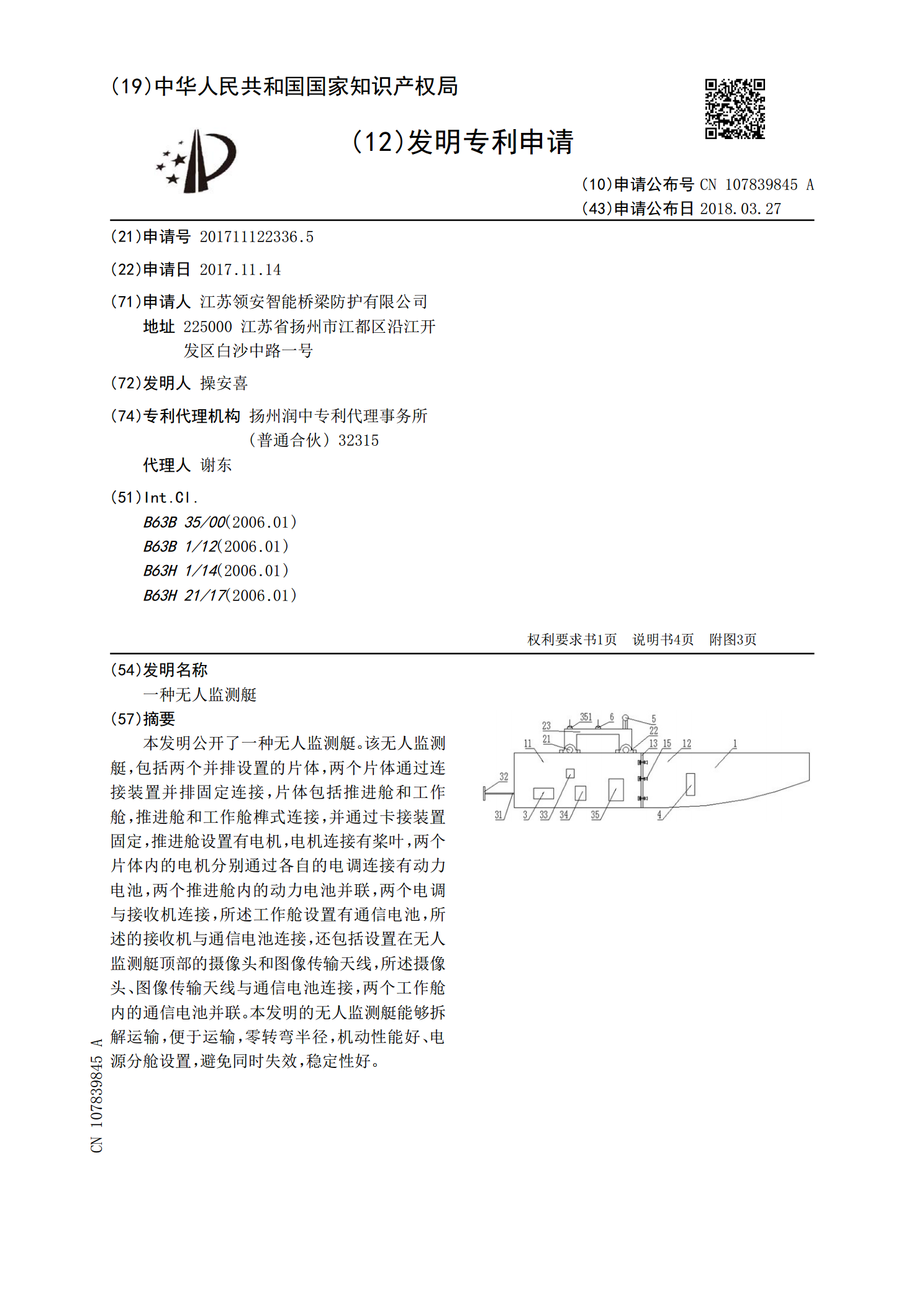
一种无人监测艇.pdf
本发明公开了一种无人监测艇。该无人监测艇,包括两个并排设置的片体,两个片体通过连接装置并排固定连接,片体包括推进舱和工作舱,推进舱和工作舱榫式连接,并通过卡接装置固定,推进舱设置有电机,电机连接有桨叶,两个片体内的电机分别通过各自的电调连接有动力电池,两个推进舱内的动力电池并联,两个电调与接收机连接,所述工作舱设置有通信电池,所述的接收机与通信电池连接,还包括设置在无人监测艇顶部的摄像头和图像传输天线,所述摄像头、图像传输天线与通信电池连接,两个工作舱内的通信电池并联。本发明的无人监测艇能够拆解运输,便于
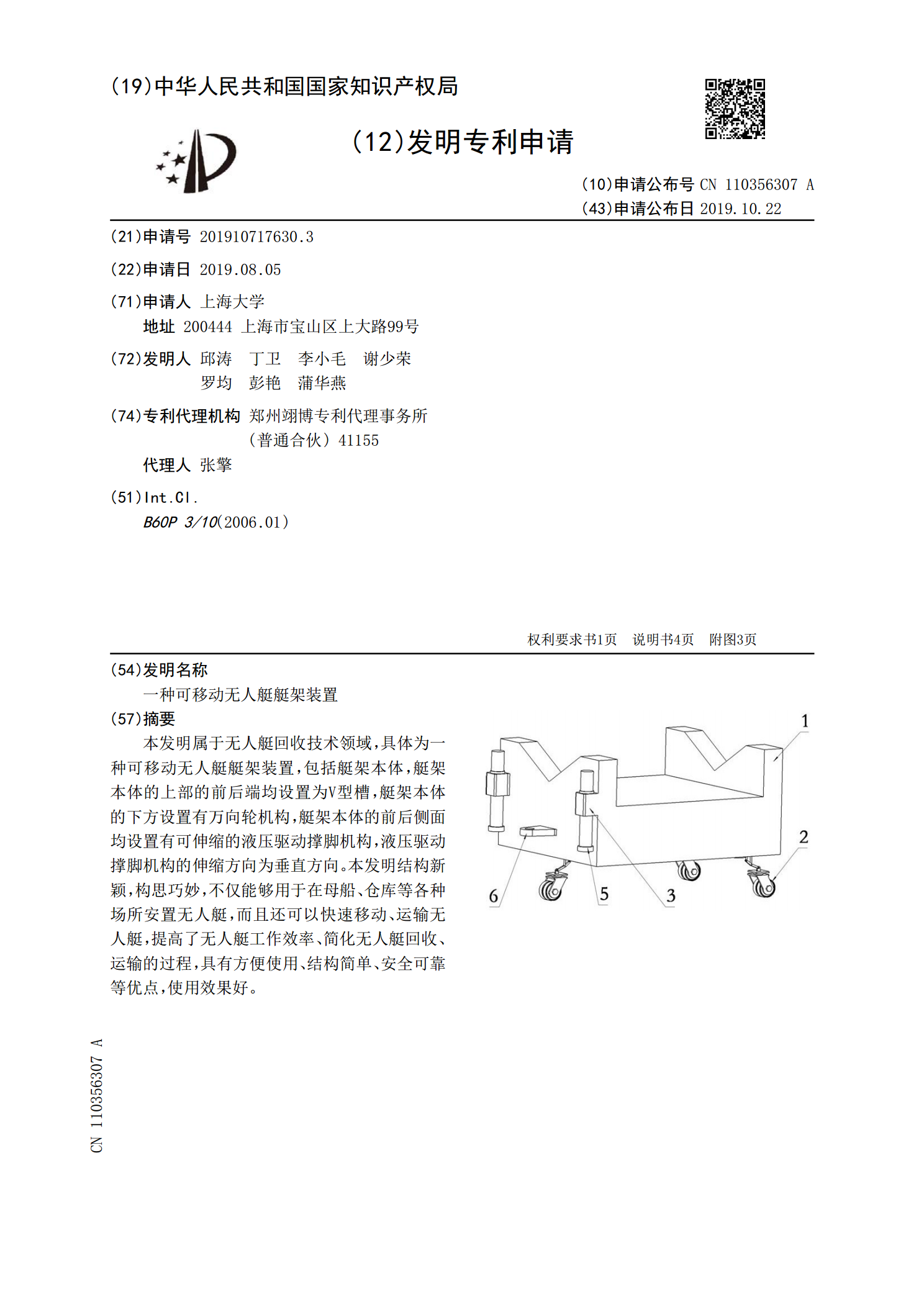
一种可移动无人艇艇架装置.pdf
本发明属于无人艇回收技术领域,具体为一种可移动无人艇艇架装置,包括艇架本体,艇架本体的上部的前后端均设置为V型槽,艇架本体的下方设置有万向轮机构,艇架本体的前后侧面均设置有可伸缩的液压驱动撑脚机构,液压驱动撑脚机构的伸缩方向为垂直方向。本发明结构新颖,构思巧妙,不仅能够用于在母船、仓库等各种场所安置无人艇,而且还可以快速移动、运输无人艇,提高了无人艇工作效率、简化无人艇回收、运输的过程,具有方便使用、结构简单、安全可靠等优点,使用效果好。