
一种全向差分驱动舵轮.pdf

白真****ng

1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全向差分驱动舵轮.pdf
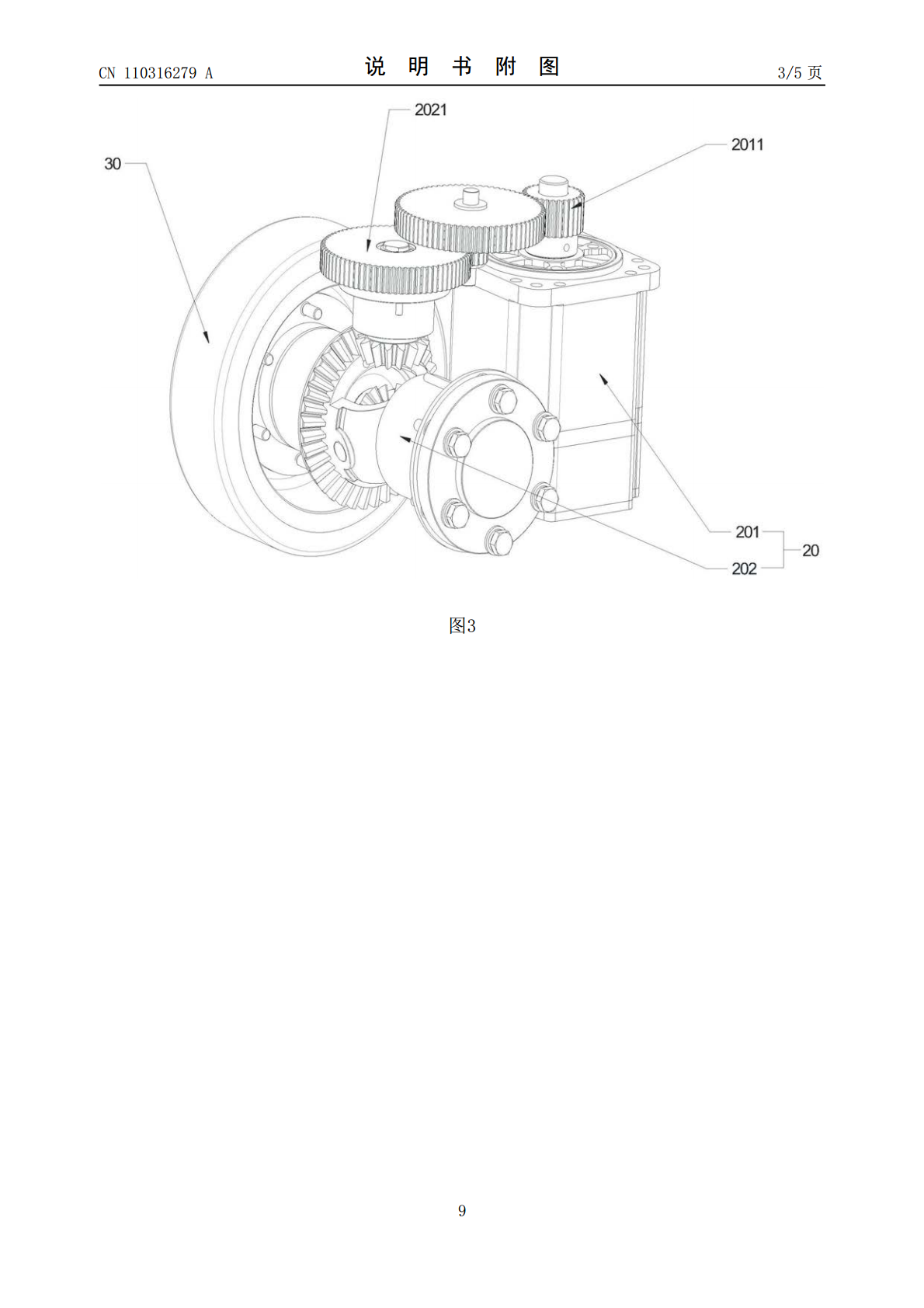
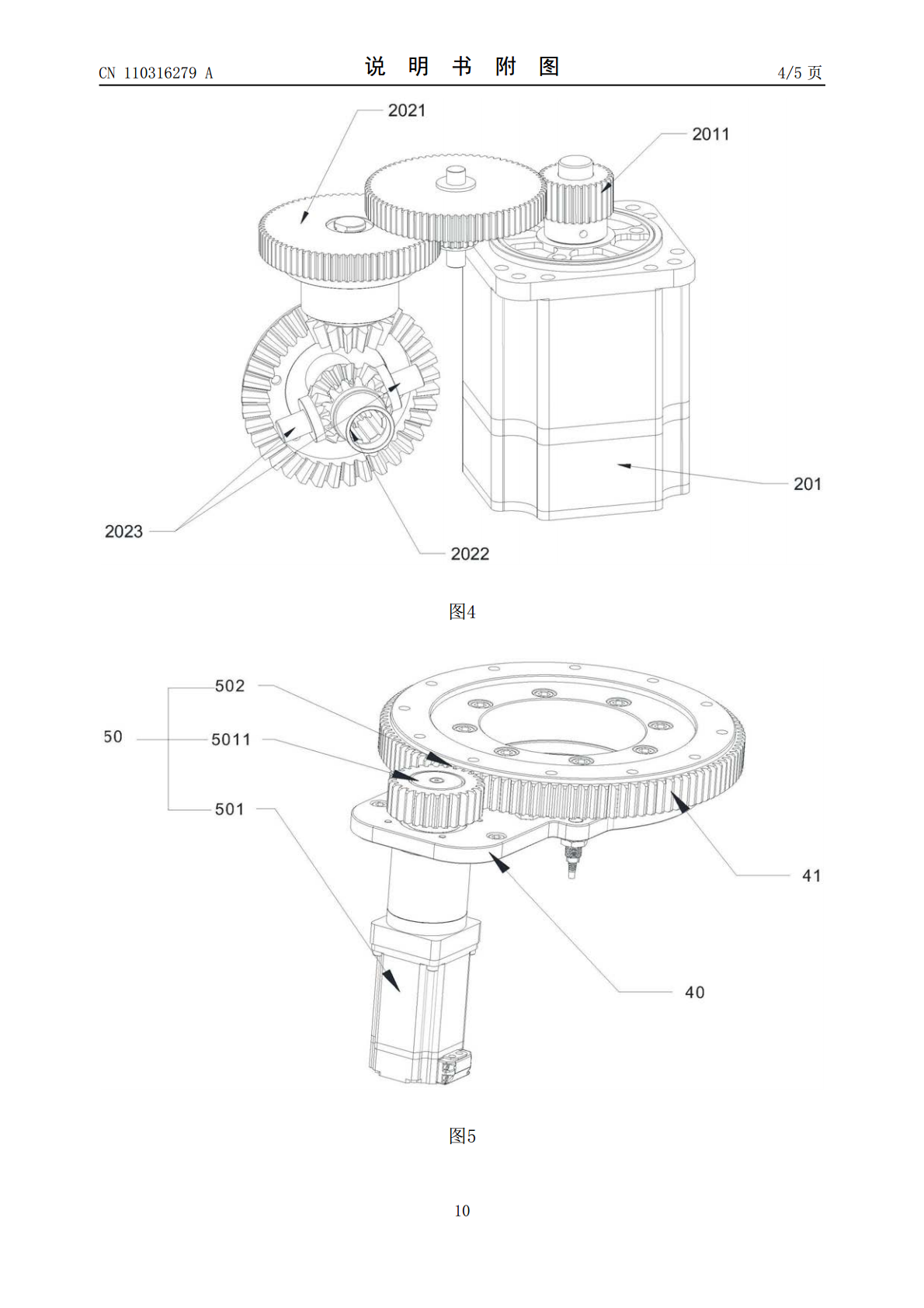
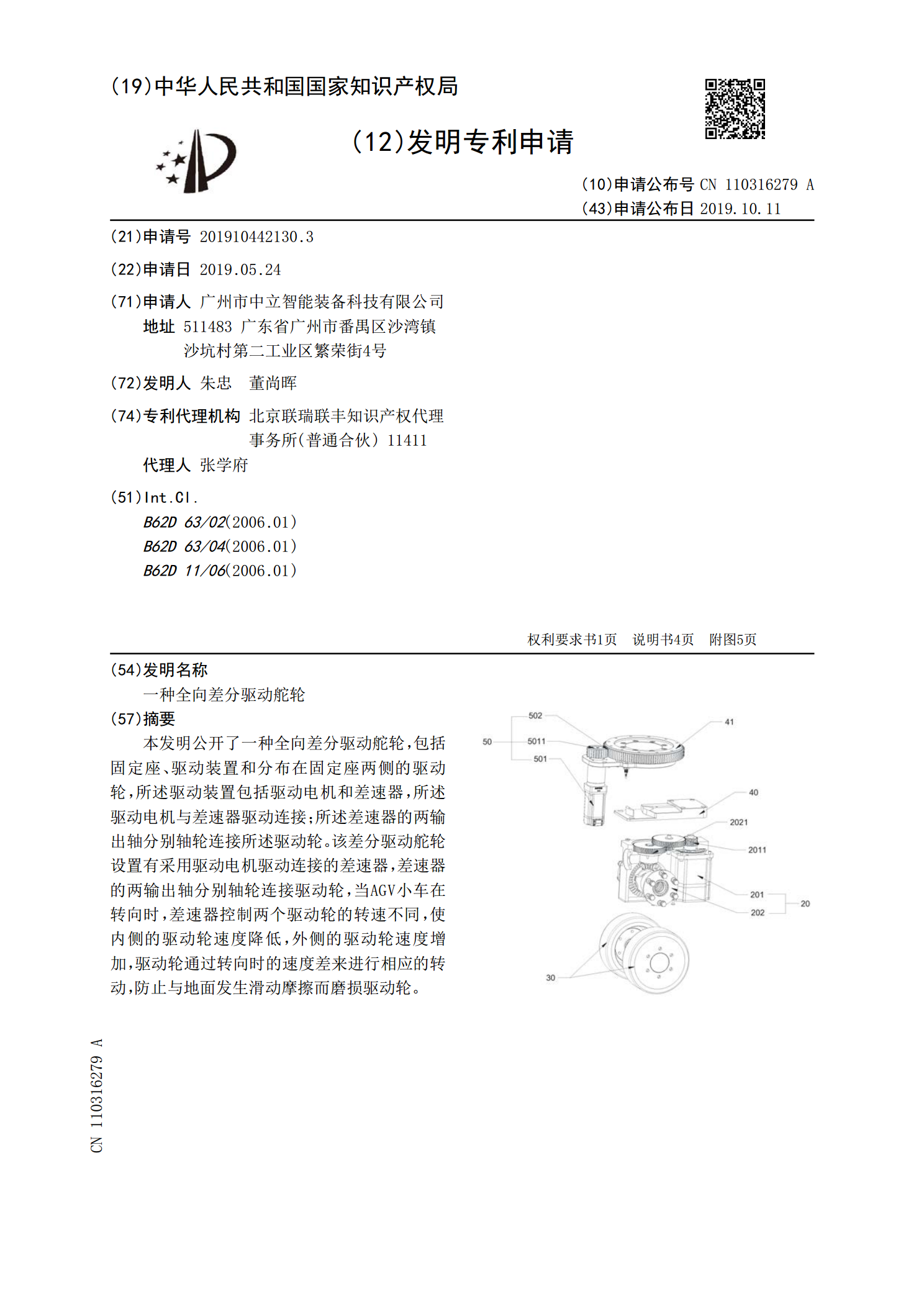
本发明公开了一种全向差分驱动舵轮,包括固定座、驱动装置和分布在固定座两侧的驱动轮,所述驱动装置包括驱动电机和差速器,所述驱动电机与差速器驱动连接;所述差速器的两输出轴分别轴轮连接所述驱动轮。该差分驱动舵轮设置有采用驱动电机驱动连接的差速器,差速器的两输出轴分别轴轮连接驱动轮,当AGV小车在转向时,差速器控制两个驱动轮的转速不同,使内侧的驱动轮速度降低,外侧的驱动轮速度增加,驱动轮通过转向时的速度差来进行相应的转动,防止与地面发生滑动摩擦而磨损驱动轮。
一种单驱动舵轮式全向AGV车.pdf
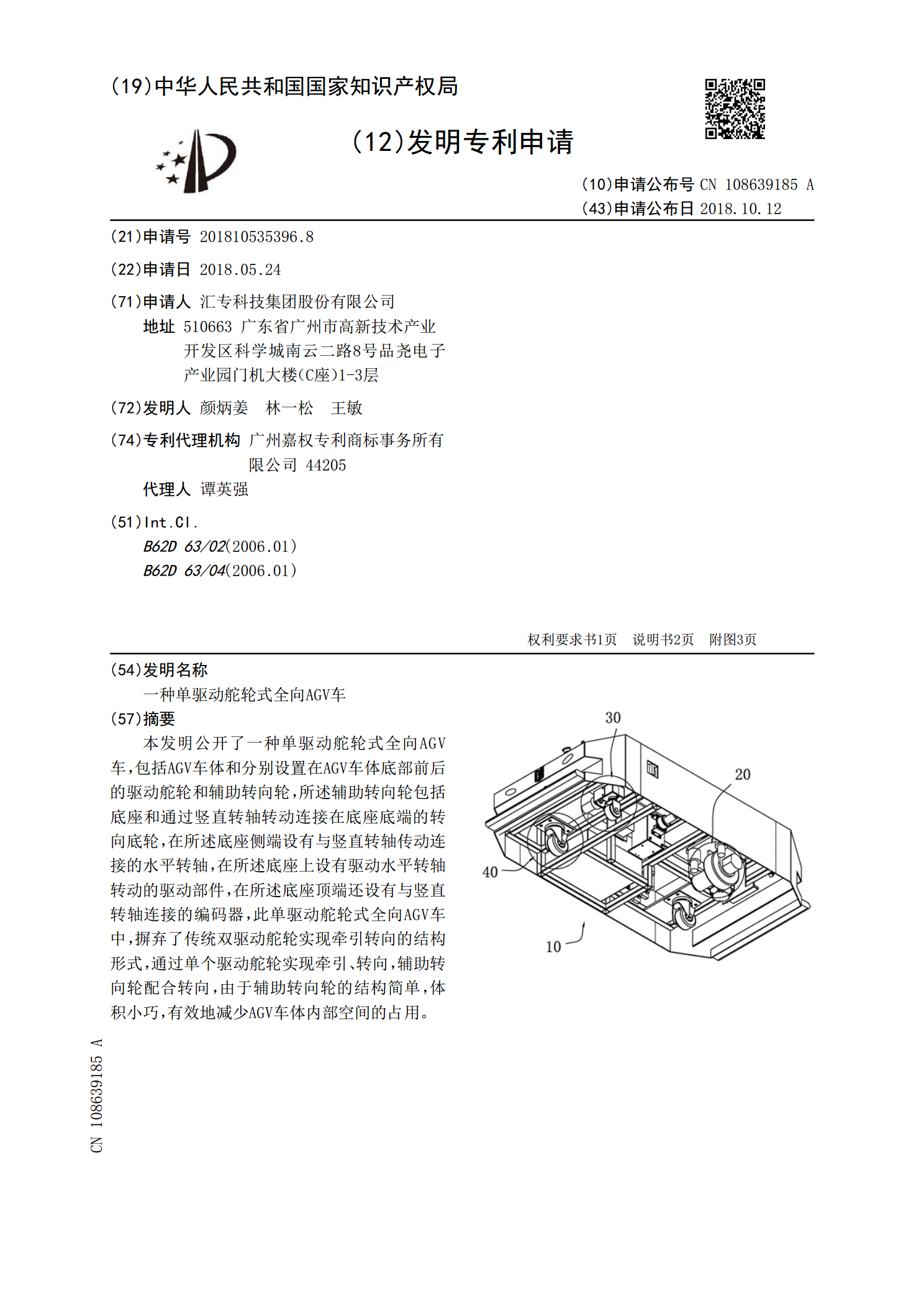
本发明公开了一种单驱动舵轮式全向AGV车,包括AGV车体和分别设置在AGV车体底部前后的驱动舵轮和辅助转向轮,所述辅助转向轮包括底座和通过竖直转轴转动连接在底座底端的转向底轮,在所述底座侧端设有与竖直转轴传动连接的水平转轴,在所述底座上设有驱动水平转轴转动的驱动部件,在所述底座顶端还设有与竖直转轴连接的编码器,此单驱动舵轮式全向AGV车中,摒弃了传统双驱动舵轮实现牵引转向的结构形式,通过单个驱动舵轮实现牵引、转向,辅助转向轮配合转向,由于辅助转向轮的结构简单,体积小巧,有效地减少AGV车体内部空间的占用。
一种差速驱动舵轮.pdf
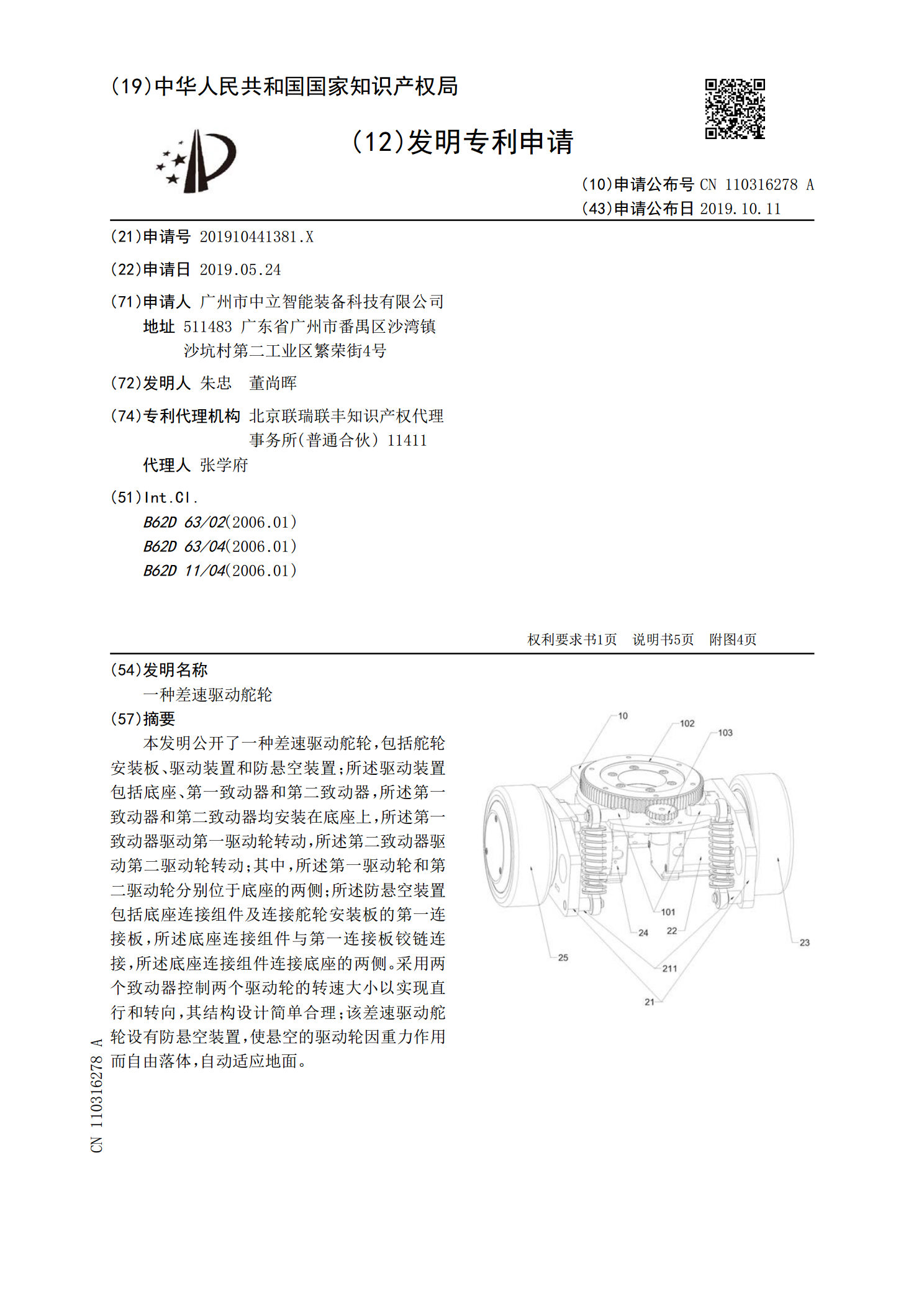
本发明公开了一种差速驱动舵轮,包括舵轮安装板、驱动装置和防悬空装置;所述驱动装置包括底座、第一致动器和第二致动器,所述第一致动器和第二致动器均安装在底座上,所述第一致动器驱动第一驱动轮转动,所述第二致动器驱动第二驱动轮转动;其中,所述第一驱动轮和第二驱动轮分别位于底座的两侧;所述防悬空装置包括底座连接组件及连接舵轮安装板的第一连接板,所述底座连接组件与第一连接板铰链连接,所述底座连接组件连接底座的两侧。采用两个致动器控制两个驱动轮的转速大小以实现直行和转向,其结构设计简单合理;该差速驱动舵轮设有防悬空装置
全向舵轮.pdf
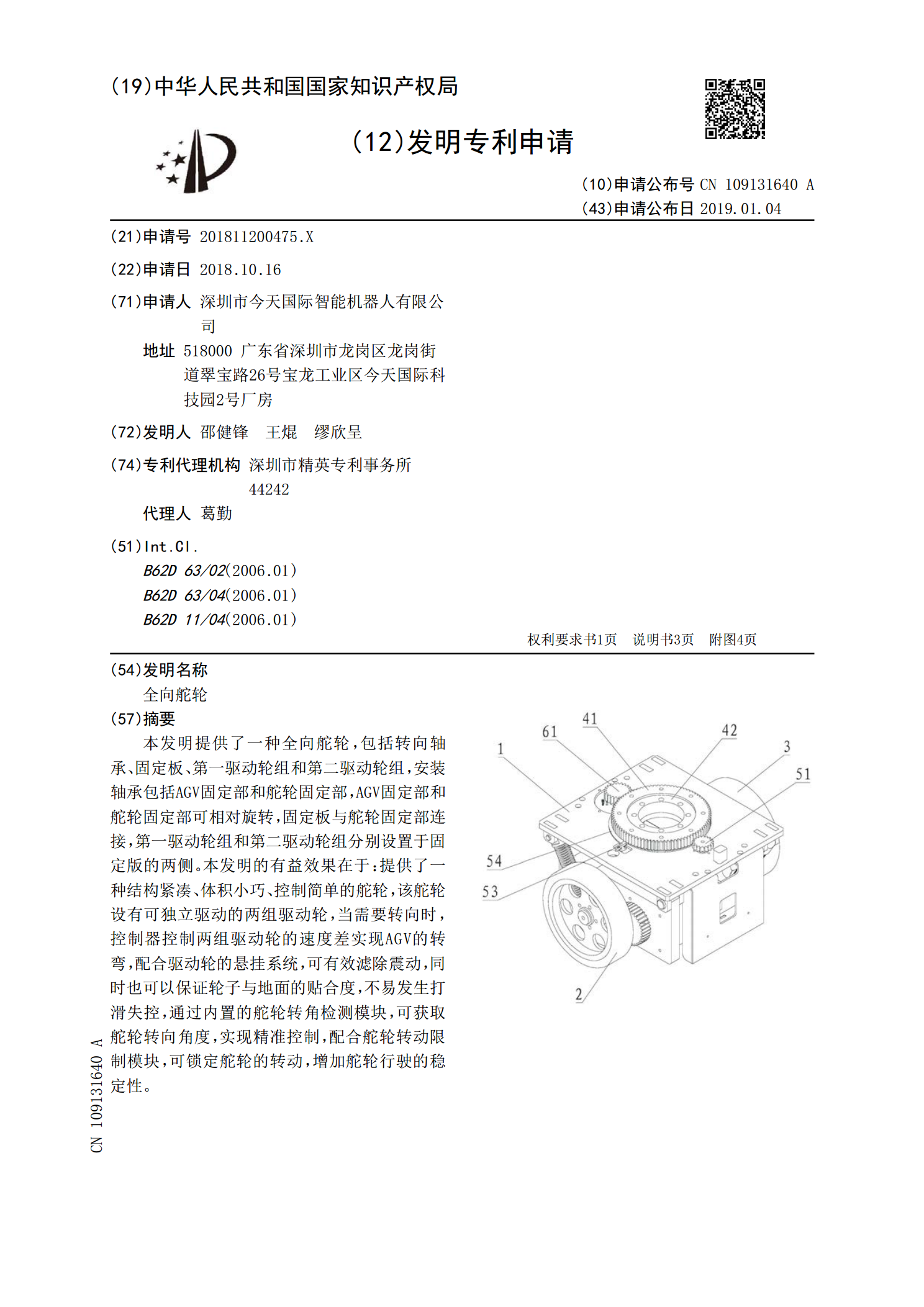
本发明提供了一种全向舵轮,包括转向轴承、固定板、第一驱动轮组和第二驱动轮组,安装轴承包括AGV固定部和舵轮固定部,AGV固定部和舵轮固定部可相对旋转,固定板与舵轮固定部连接,第一驱动轮组和第二驱动轮组分别设置于固定版的两侧。本发明的有益效果在于:提供了一种结构紧凑、体积小巧、控制简单的舵轮,该舵轮设有可独立驱动的两组驱动轮,当需要转向时,控制器控制两组驱动轮的速度差实现AGV的转弯,配合驱动轮的悬挂系统,可有效滤除震动,同时也可以保证轮子与地面的贴合度,不易发生打滑失控,通过内置的舵轮转角检测模块,可获取
全向轮驱动装置及全向差速驱动小车.pdf
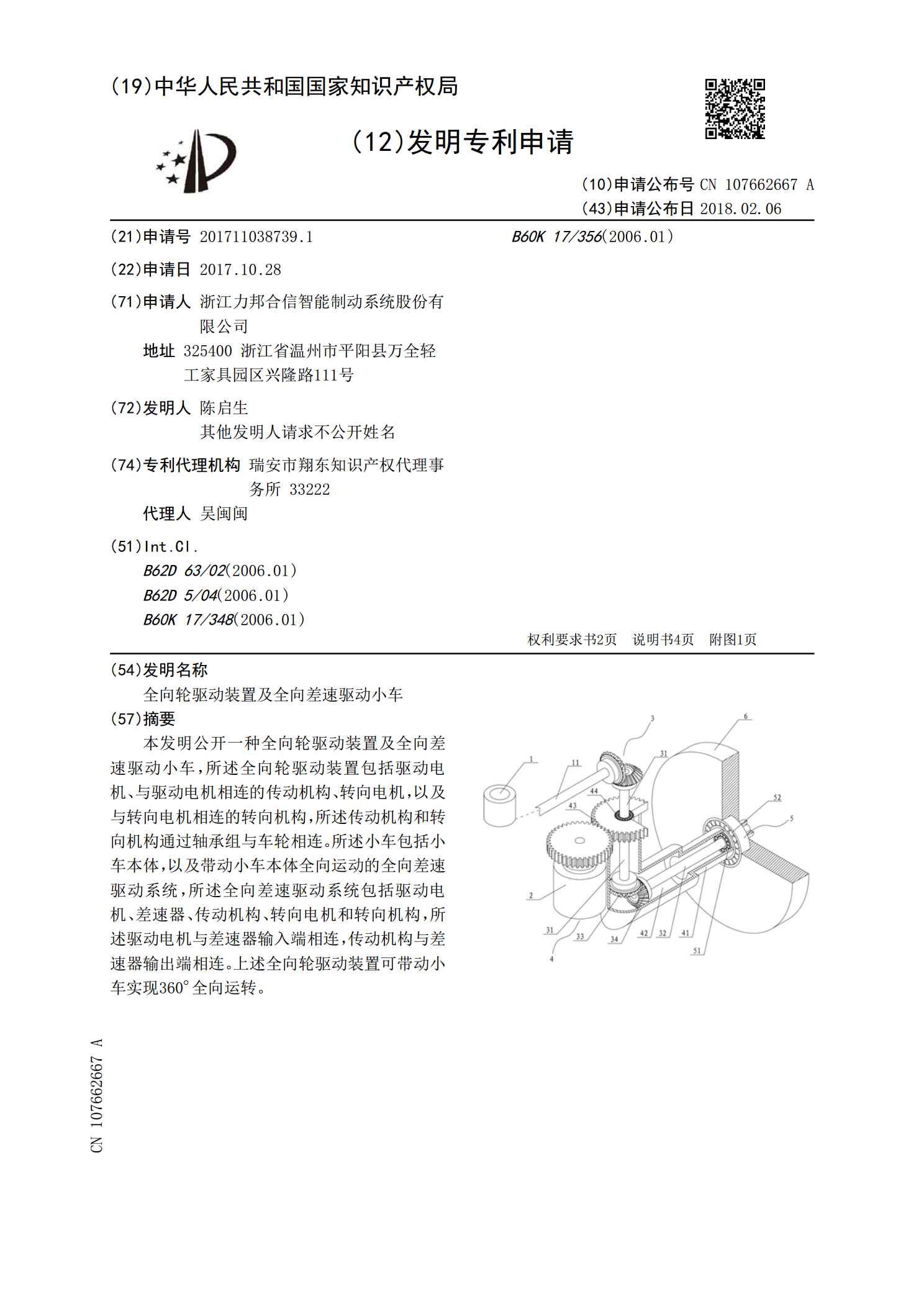
本发明公开一种全向轮驱动装置及全向差速驱动小车,所述全向轮驱动装置包括驱动电机、与驱动电机相连的传动机构、转向电机,以及与转向电机相连的转向机构,所述传动机构和转向机构通过轴承组与车轮相连。所述小车包括小车本体,以及带动小车本体全向运动的全向差速驱动系统,所述全向差速驱动系统包括驱动电机、差速器、传动机构、转向电机和转向机构,所述驱动电机与差速器输入端相连,传动机构与差速器输出端相连。上述全向轮驱动装置可带动小车实现360°全向运转。