
一种差速驱动舵轮.pdf

Jo****34

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种差速驱动舵轮.pdf
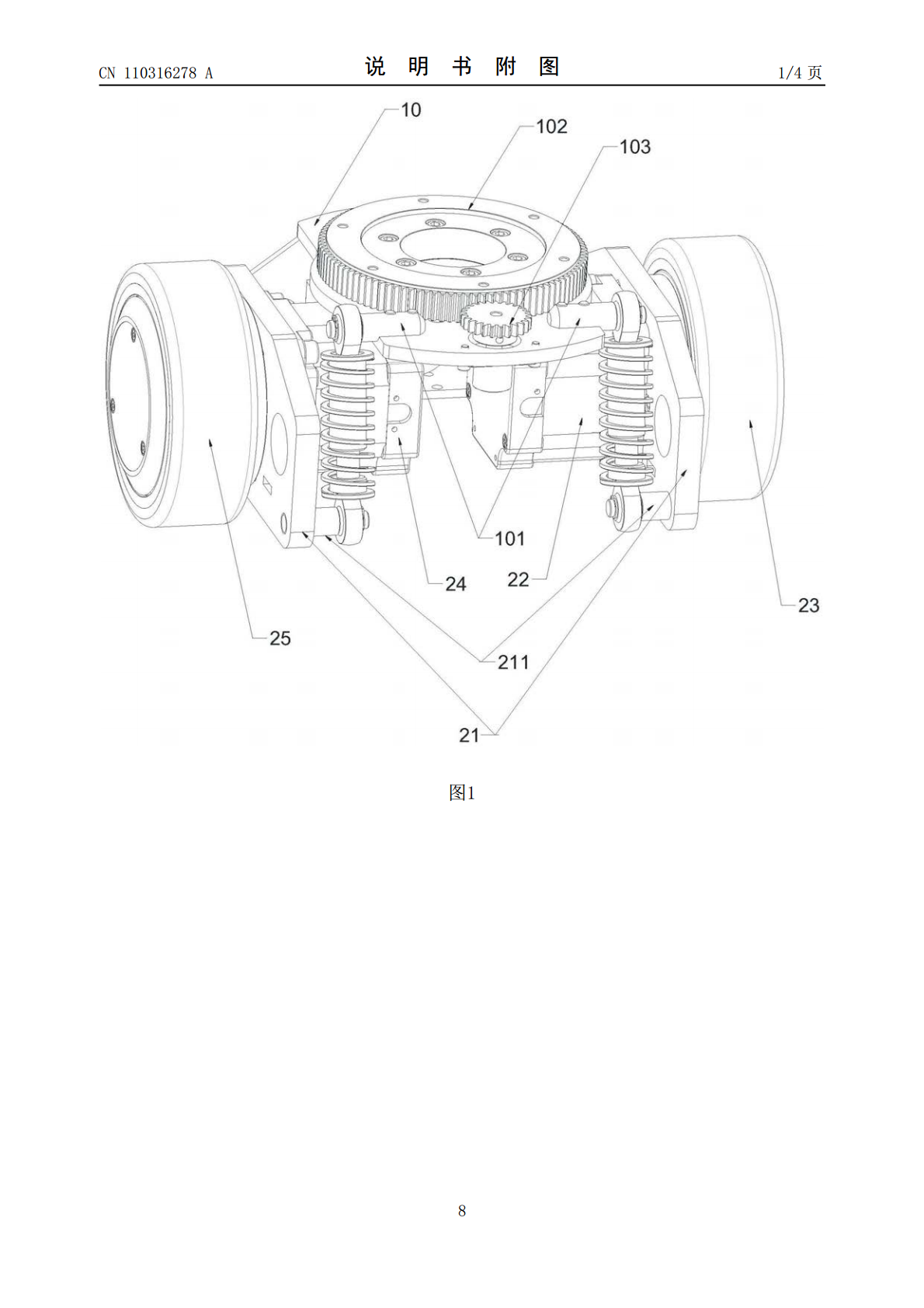
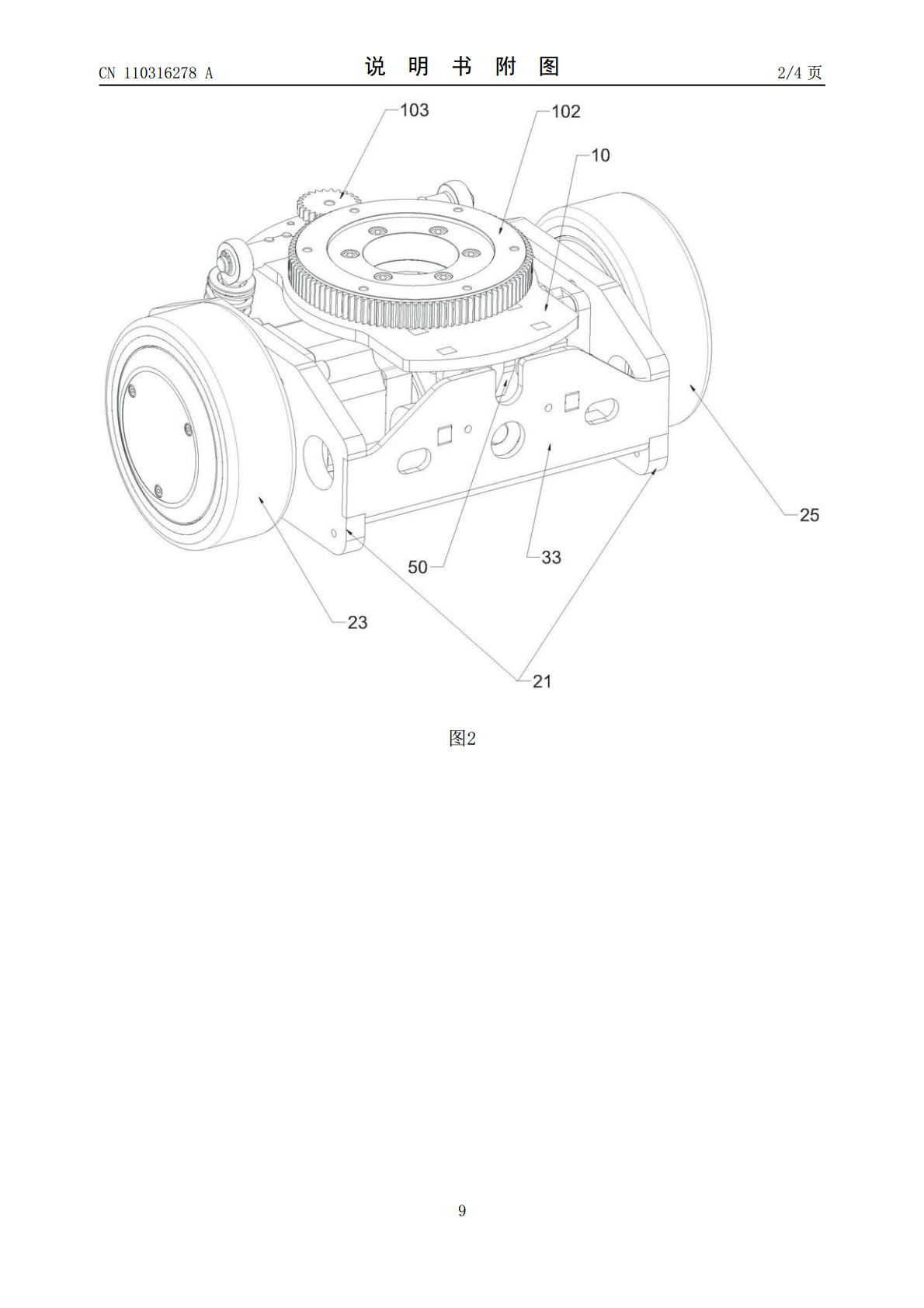
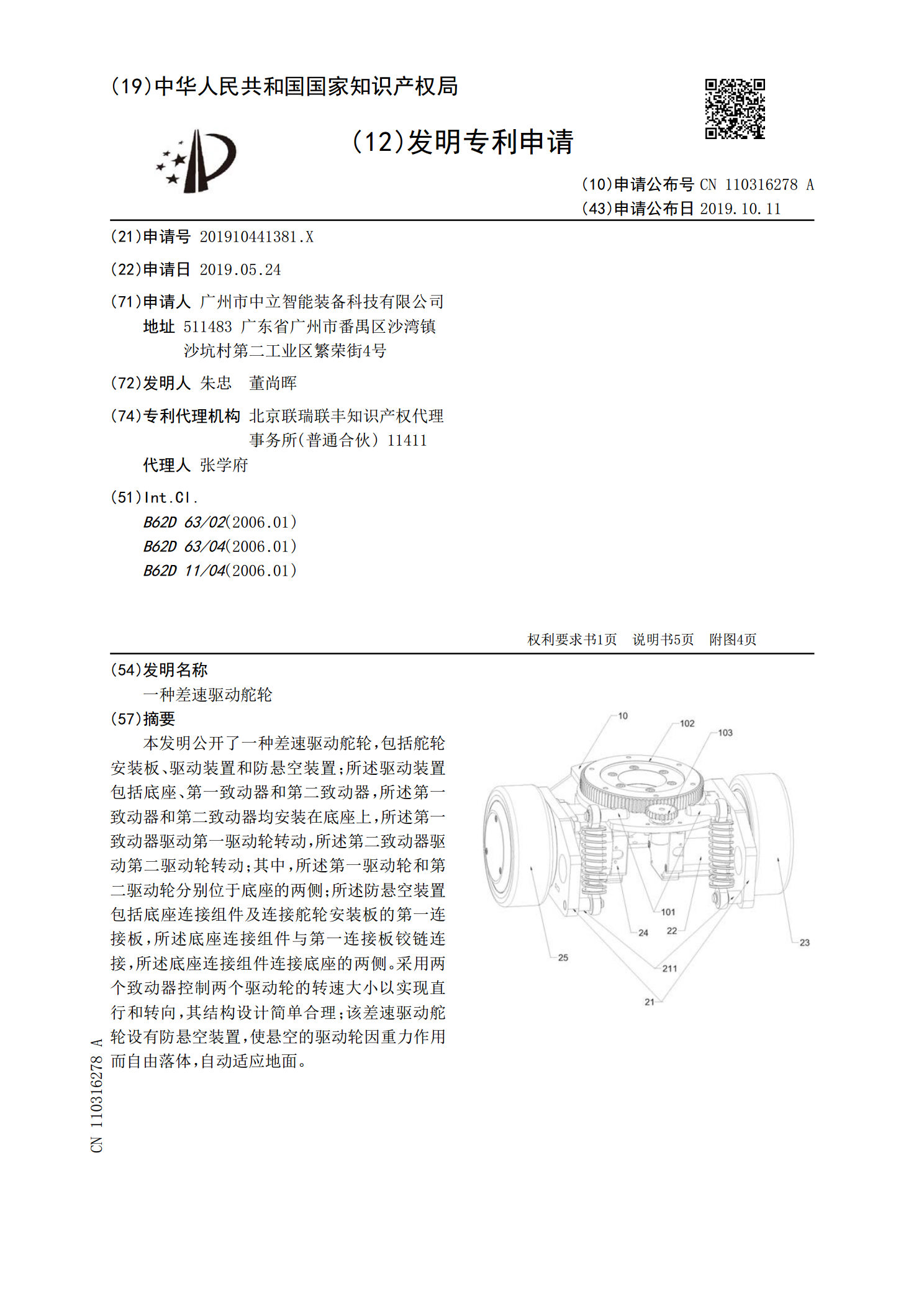
本发明公开了一种差速驱动舵轮,包括舵轮安装板、驱动装置和防悬空装置;所述驱动装置包括底座、第一致动器和第二致动器,所述第一致动器和第二致动器均安装在底座上,所述第一致动器驱动第一驱动轮转动,所述第二致动器驱动第二驱动轮转动;其中,所述第一驱动轮和第二驱动轮分别位于底座的两侧;所述防悬空装置包括底座连接组件及连接舵轮安装板的第一连接板,所述底座连接组件与第一连接板铰链连接,所述底座连接组件连接底座的两侧。采用两个致动器控制两个驱动轮的转速大小以实现直行和转向,其结构设计简单合理;该差速驱动舵轮设有防悬空装置
一种差动转向的重型电驱动舵轮.pdf
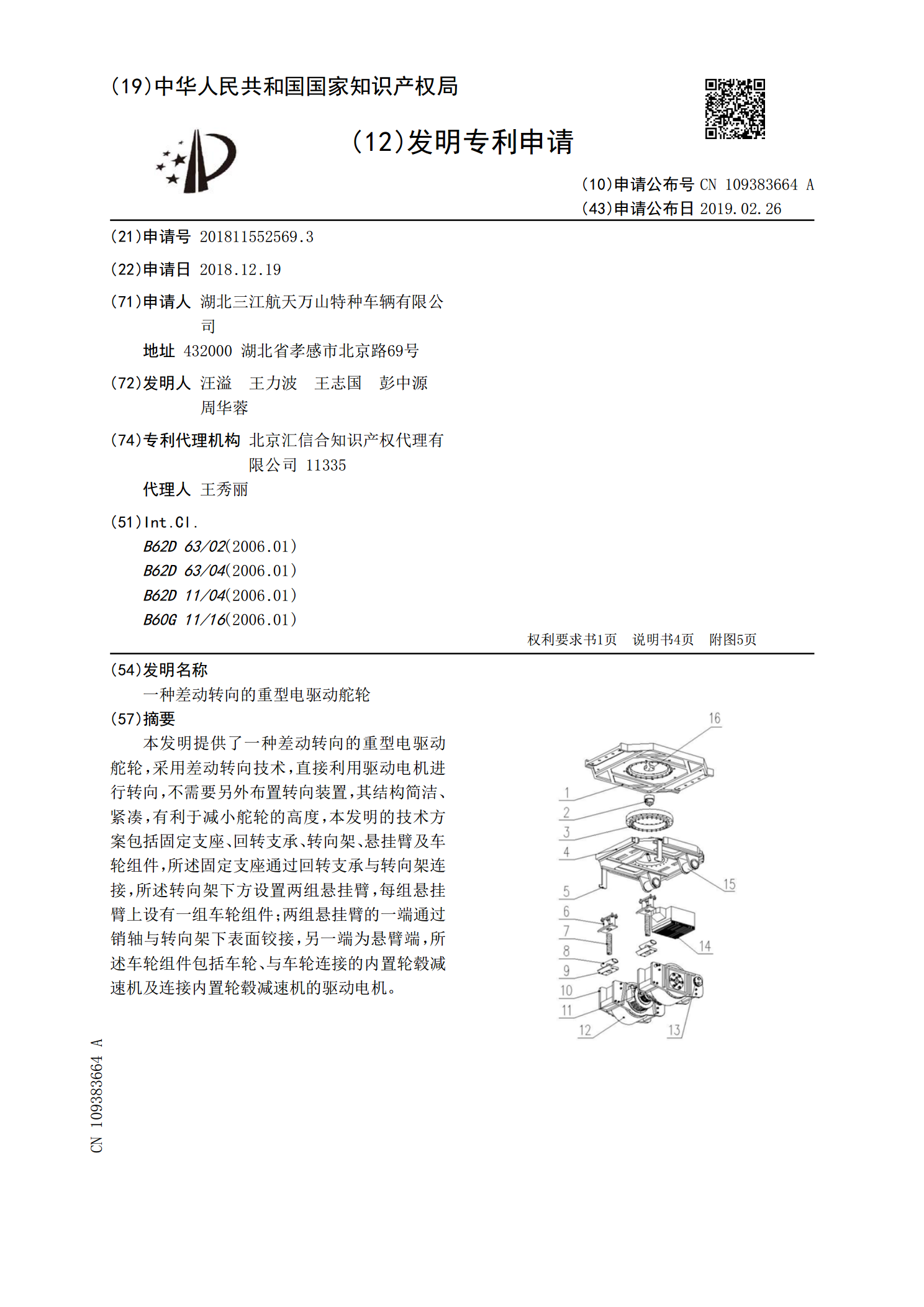
本发明提供了一种差动转向的重型电驱动舵轮,采用差动转向技术,直接利用驱动电机进行转向,不需要另外布置转向装置,其结构简洁、紧凑,有利于减小舵轮的高度,本发明的技术方案包括固定支座、回转支承、转向架、悬挂臂及车轮组件,所述固定支座通过回转支承与转向架连接,所述转向架下方设置两组悬挂臂,每组悬挂臂上设有一组车轮组件;两组悬挂臂的一端通过销轴与转向架下表面铰接,另一端为悬臂端,所述车轮组件包括车轮、与车轮连接的内置轮毂减速机及连接内置轮毂减速机的驱动电机。
一种差速驱动装置.pdf
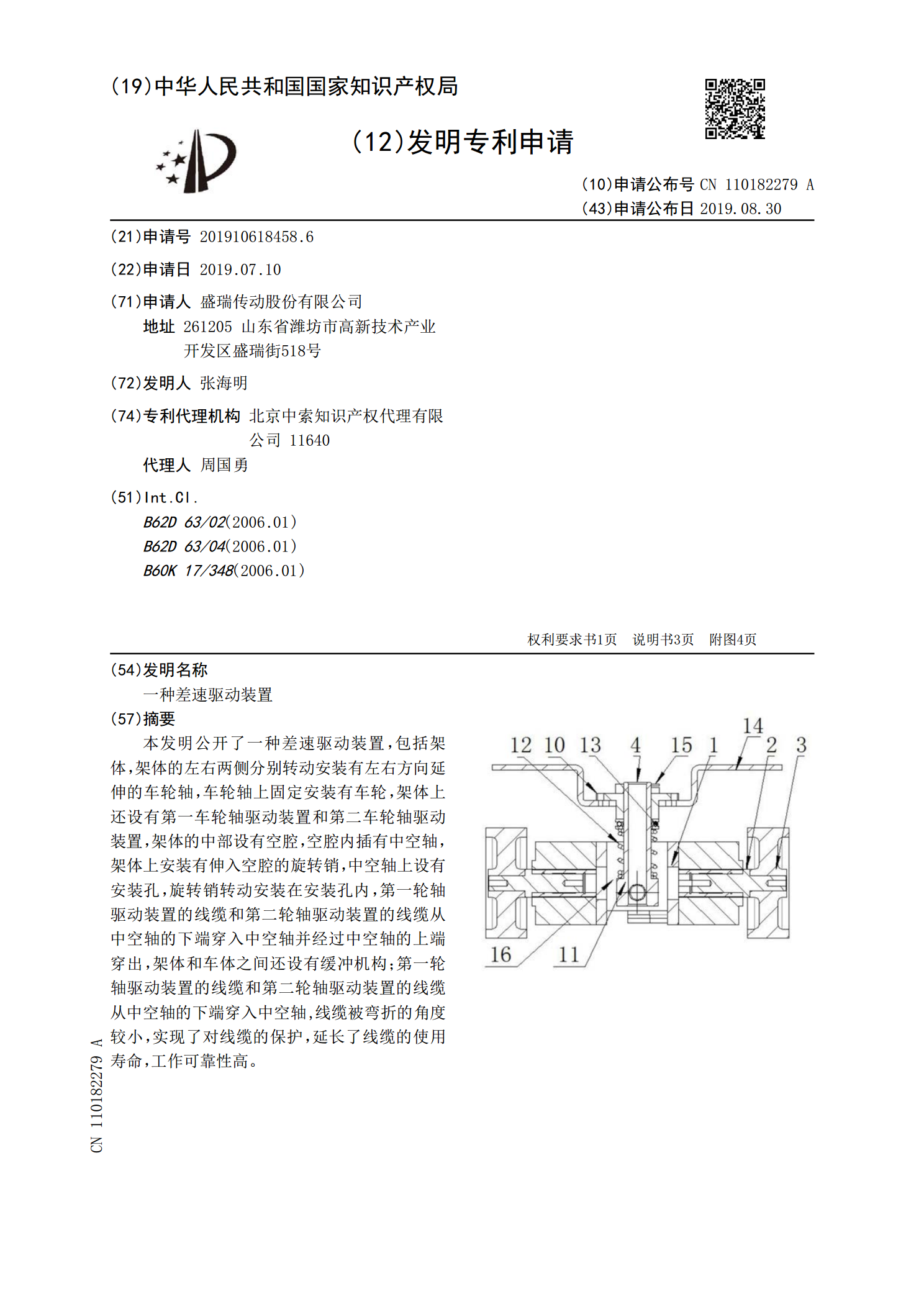
本发明公开了一种差速驱动装置,包括架体,架体的左右两侧分别转动安装有左右方向延伸的车轮轴,车轮轴上固定安装有车轮,架体上还设有第一车轮轴驱动装置和第二车轮轴驱动装置,架体的中部设有空腔,空腔内插有中空轴,架体上安装有伸入空腔的旋转销,中空轴上设有安装孔,旋转销转动安装在安装孔内,第一轮轴驱动装置的线缆和第二轮轴驱动装置的线缆从中空轴的下端穿入中空轴并经过中空轴的上端穿出,架体和车体之间还设有缓冲机构;第一轮轴驱动装置的线缆和第二轮轴驱动装置的线缆从中空轴的下端穿入中空轴,线缆被弯折的角度较小,实现了对线缆
一种差速驱动装置.pdf
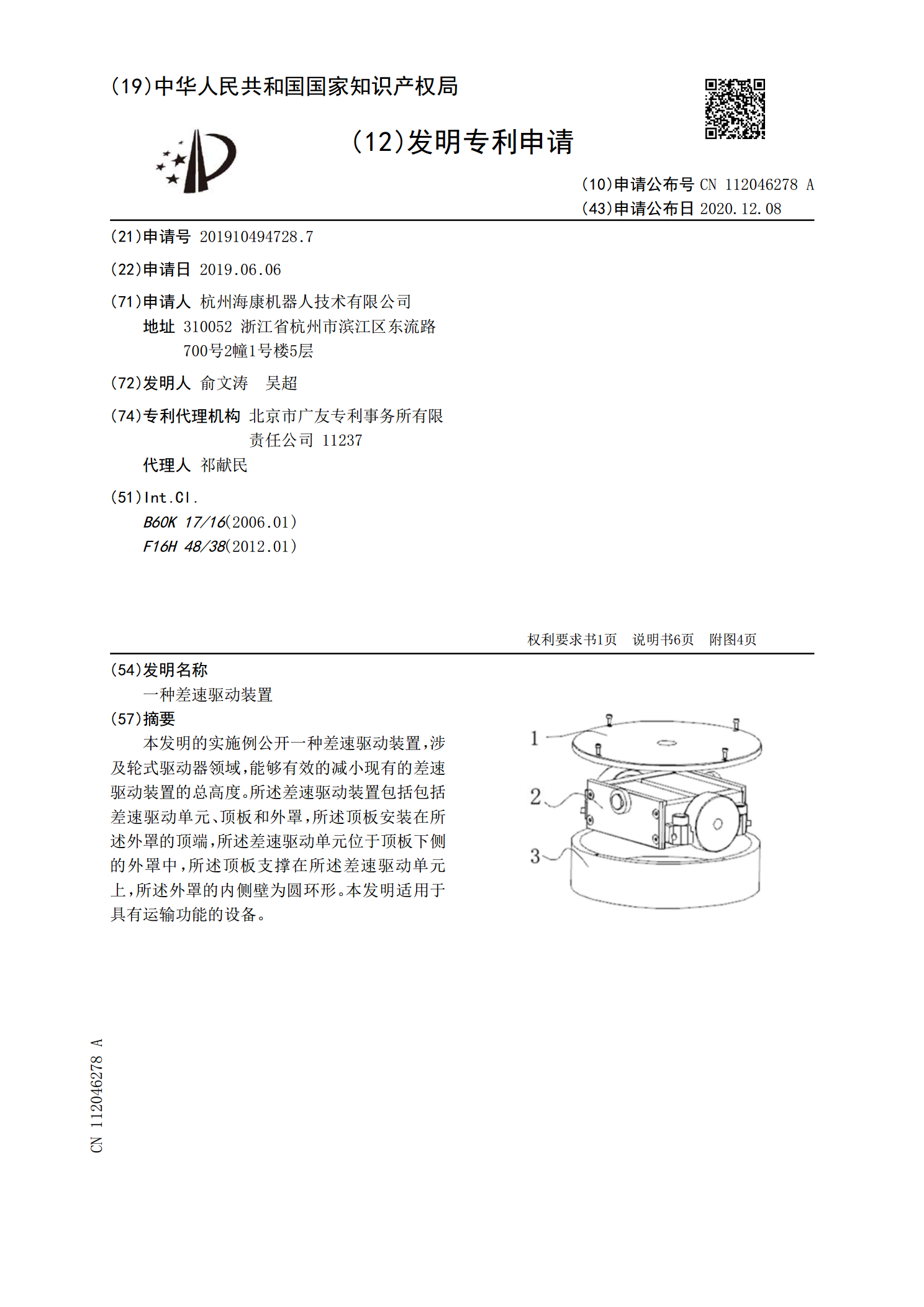
本发明的实施例公开一种差速驱动装置,涉及轮式驱动器领域,能够有效的减小现有的差速驱动装置的总高度。所述差速驱动装置包括包括差速驱动单元、顶板和外罩,所述顶板安装在所述外罩的顶端,所述差速驱动单元位于顶板下侧的外罩中,所述顶板支撑在所述差速驱动单元上,所述外罩的内侧壁为圆环形。本发明适用于具有运输功能的设备。
AGV舵轮驱动减震机构和AGV舵轮驱动装置.pdf
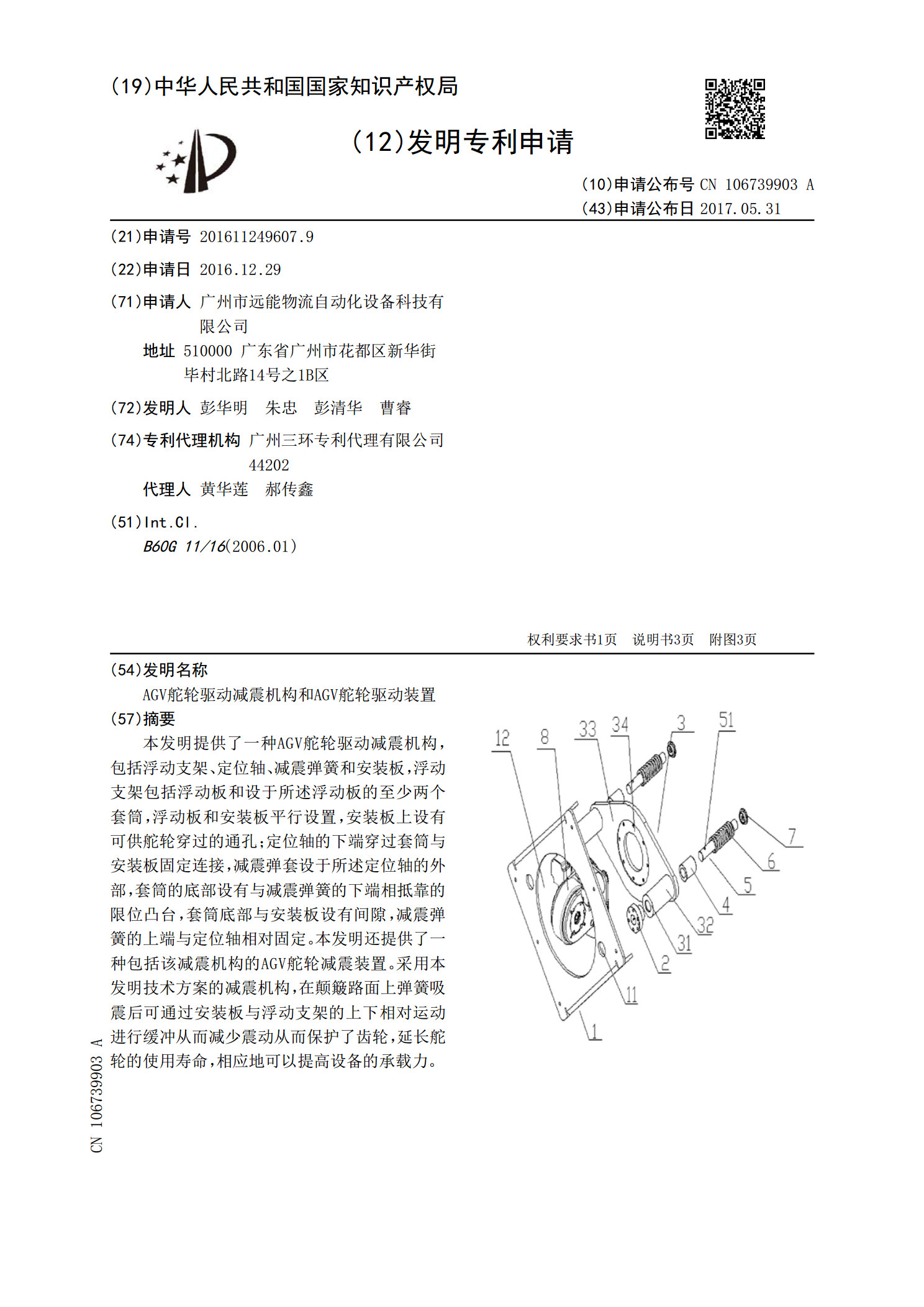
本发明提供了一种AGV舵轮驱动减震机构,包括浮动支架、定位轴、减震弹簧和安装板,浮动支架包括浮动板和设于所述浮动板的至少两个套筒,浮动板和安装板平行设置,安装板上设有可供舵轮穿过的通孔;定位轴的下端穿过套筒与安装板固定连接,减震弹套设于所述定位轴的外部,套筒的底部设有与减震弹簧的下端相抵靠的限位凸台,套筒底部与安装板设有间隙,减震弹簧的上端与定位轴相对固定。本发明还提供了一种包括该减震机构的AGV舵轮减震装置。采用本发明技术方案的减震机构,在颠簸路面上弹簧吸震后可通过安装板与浮动支架的上下相对运动进行缓冲