
一种机器人末端砂带机.pdf

雨巷****彦峰

1/9
2/9
3/9
4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人末端砂带机.pdf
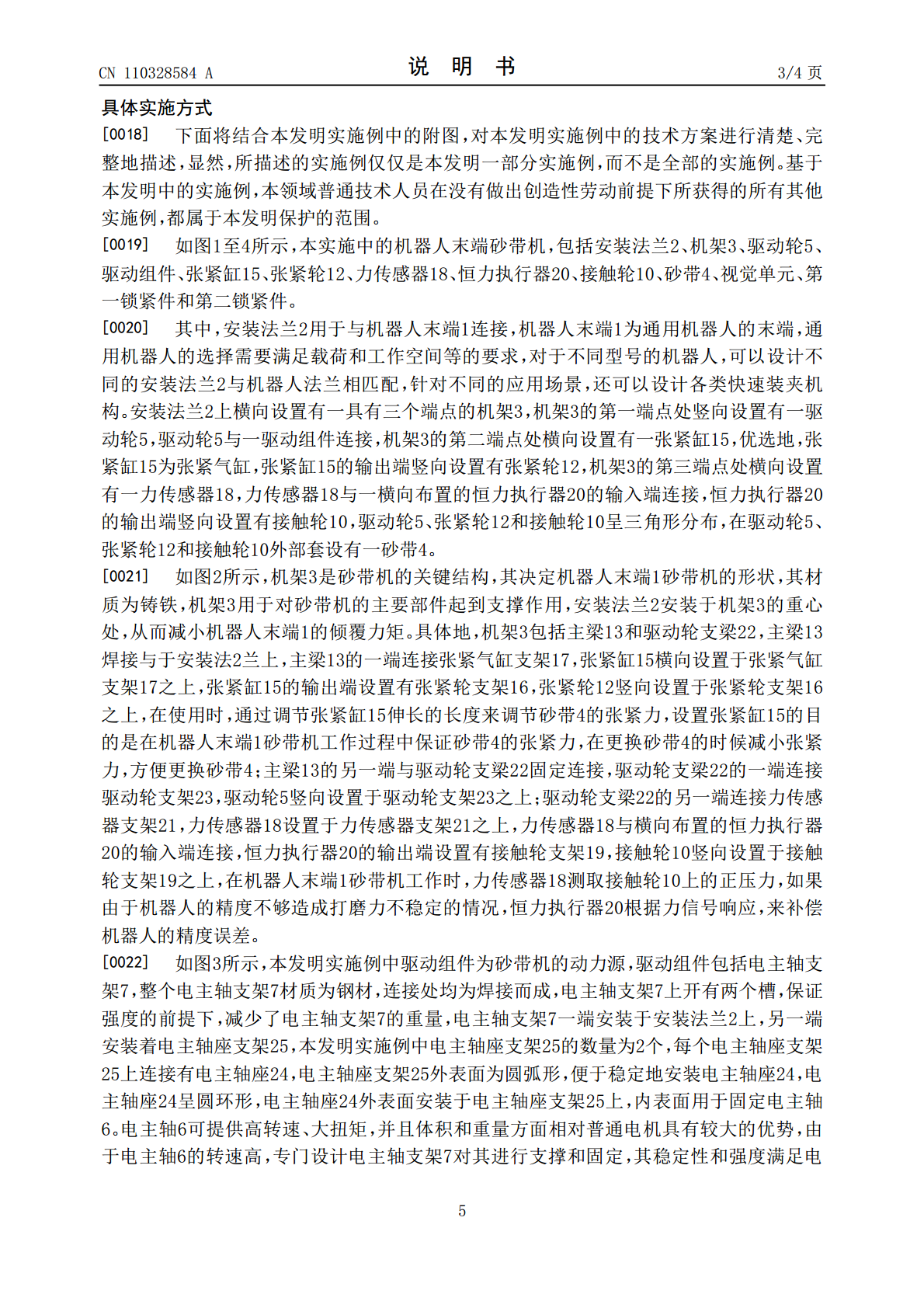
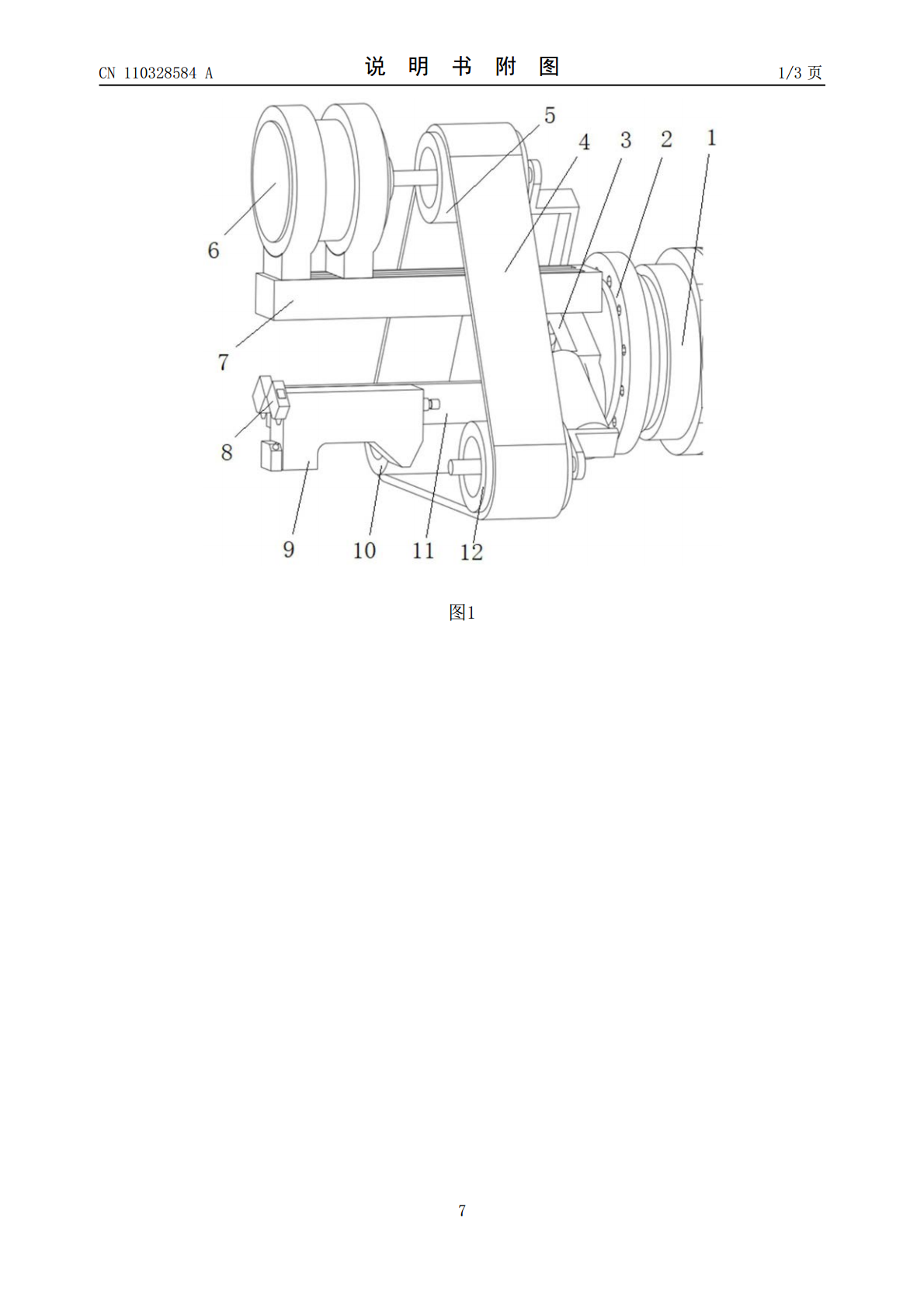
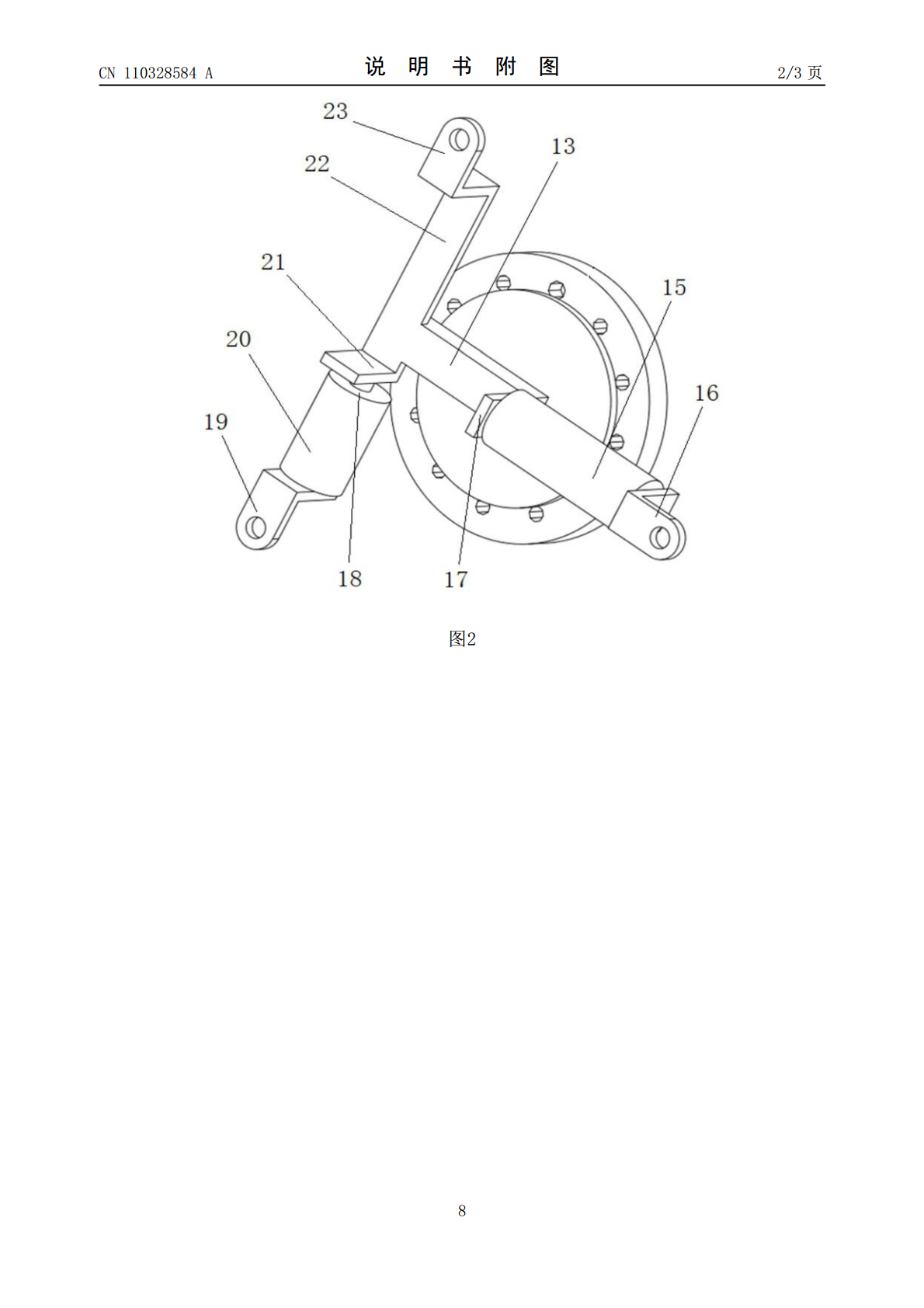
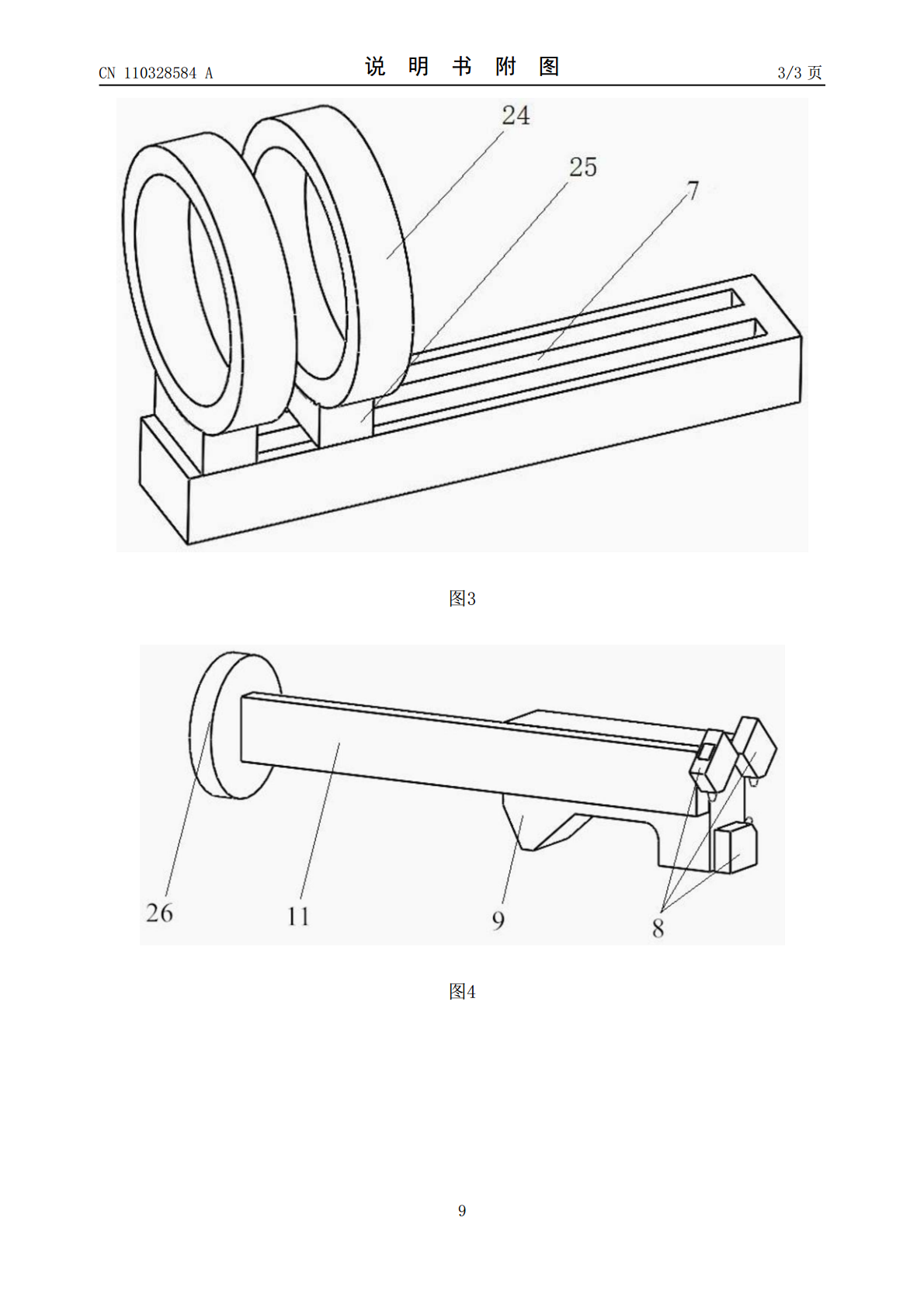
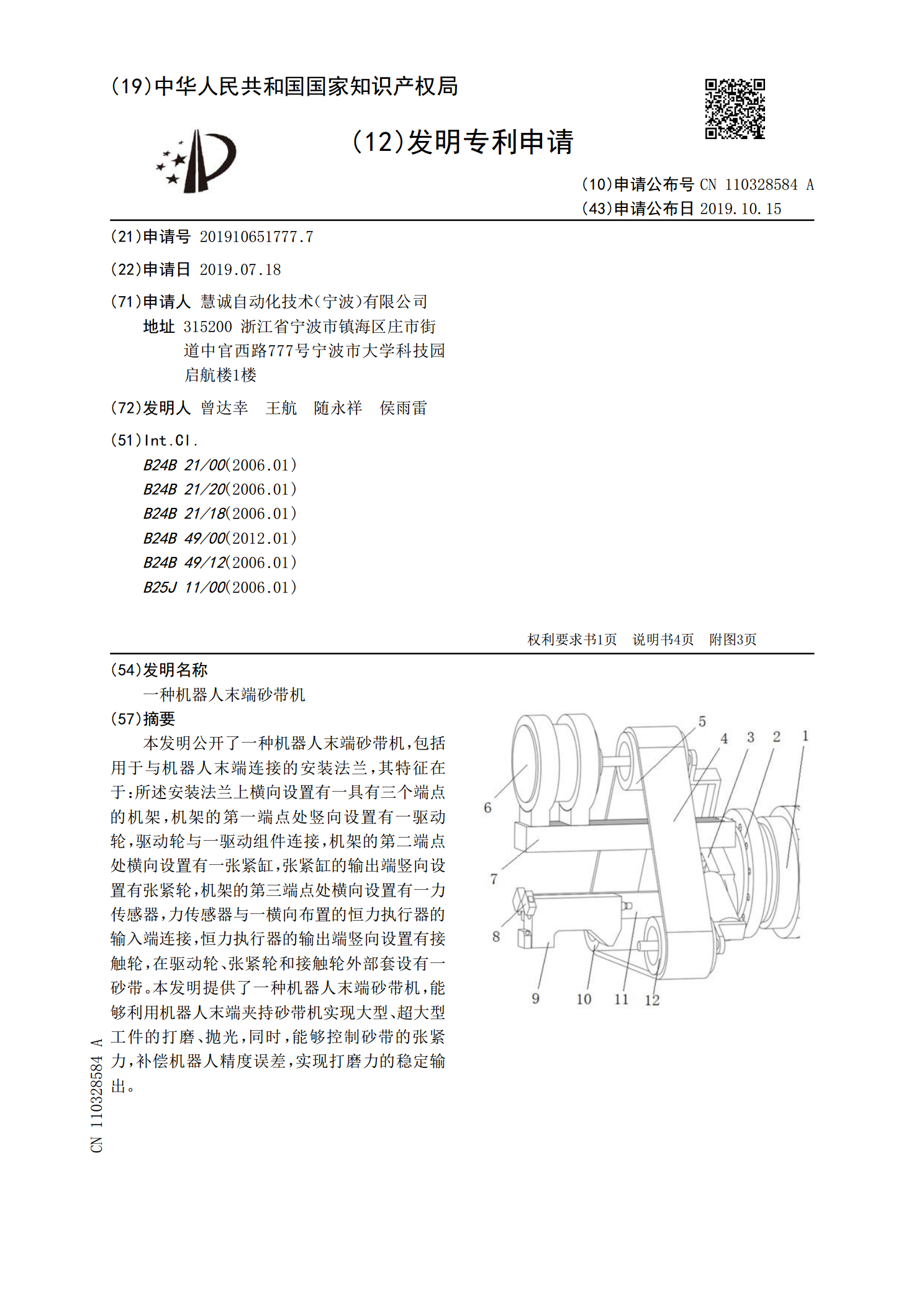
本发明公开了一种机器人末端砂带机,包括用于与机器人末端连接的安装法兰,其特征在于:所述安装法兰上横向设置有一具有三个端点的机架,机架的第一端点处竖向设置有一驱动轮,驱动轮与一驱动组件连接,机架的第二端点处横向设置有一张紧缸,张紧缸的输出端竖向设置有张紧轮,机架的第三端点处横向设置有一力传感器,力传感器与一横向布置的恒力执行器的输入端连接,恒力执行器的输出端竖向设置有接触轮,在驱动轮、张紧轮和接触轮外部套设有一砂带。本发明提供了一种机器人末端砂带机,能够利用机器人末端夹持砂带机实现大型、超大型工件的打磨、抛
机器人末端砂带抛光工具.pdf
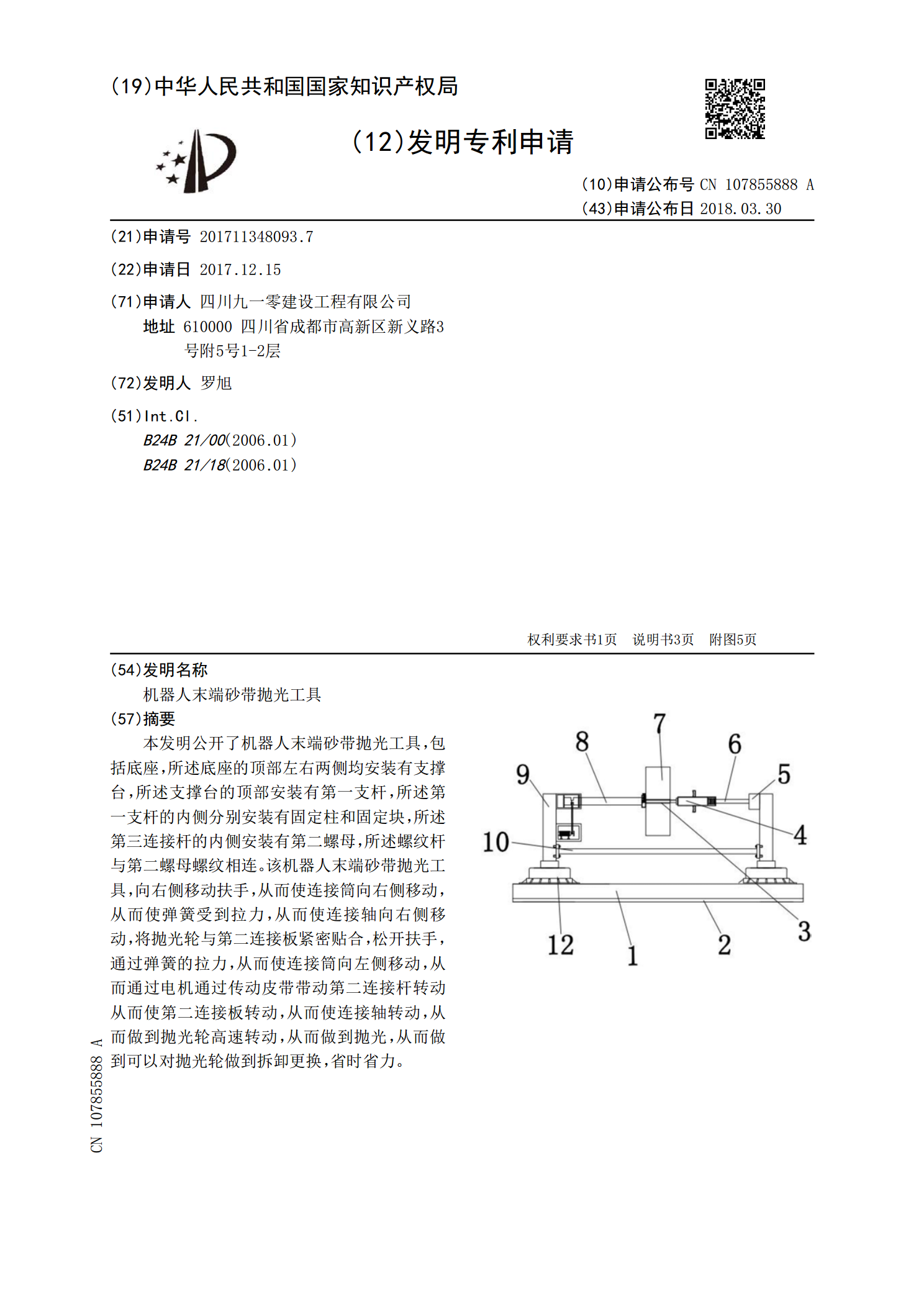
本发明公开了机器人末端砂带抛光工具,包括底座,所述底座的顶部左右两侧均安装有支撑台,所述支撑台的顶部安装有第一支杆,所述第一支杆的内侧分别安装有固定柱和固定块,所述第三连接杆的内侧安装有第二螺母,所述螺纹杆与第二螺母螺纹相连。该机器人末端砂带抛光工具,向右侧移动扶手,从而使连接筒向右侧移动,从而使弹簧受到拉力,从而使连接轴向右侧移动,将抛光轮与第二连接板紧密贴合,松开扶手,通过弹簧的拉力,从而使连接筒向左侧移动,从而通过电机通过传动皮带带动第二连接杆转动从而使第二连接板转动,从而使连接轴转动,从而做到抛光
一种安装在机器人末端的砂带打磨工具.pdf
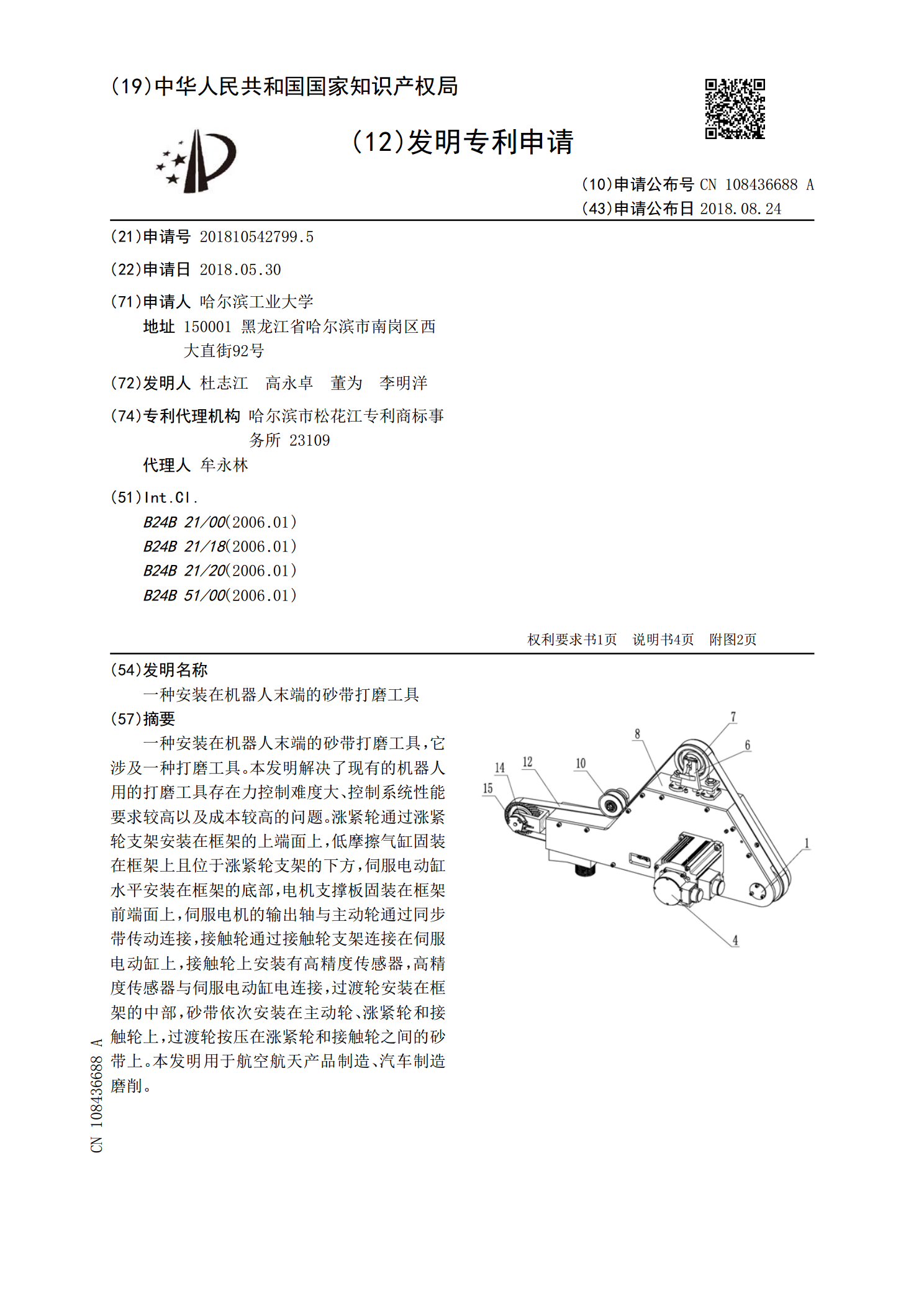
一种安装在机器人末端的砂带打磨工具,它涉及一种打磨工具。本发明解决了现有的机器人用的打磨工具存在力控制难度大、控制系统性能要求较高以及成本较高的问题。涨紧轮通过涨紧轮支架安装在框架的上端面上,低摩擦气缸固装在框架上且位于涨紧轮支架的下方,伺服电动缸水平安装在框架的底部,电机支撑板固装在框架前端面上,伺服电机的输出轴与主动轮通过同步带传动连接,接触轮通过接触轮支架连接在伺服电动缸上,接触轮上安装有高精度传感器,高精度传感器与伺服电动缸电连接,过渡轮安装在框架的中部,砂带依次安装在主动轮、涨紧轮和接触轮上,过
适用于机器人末端柔性砂带磨抛装置.pdf
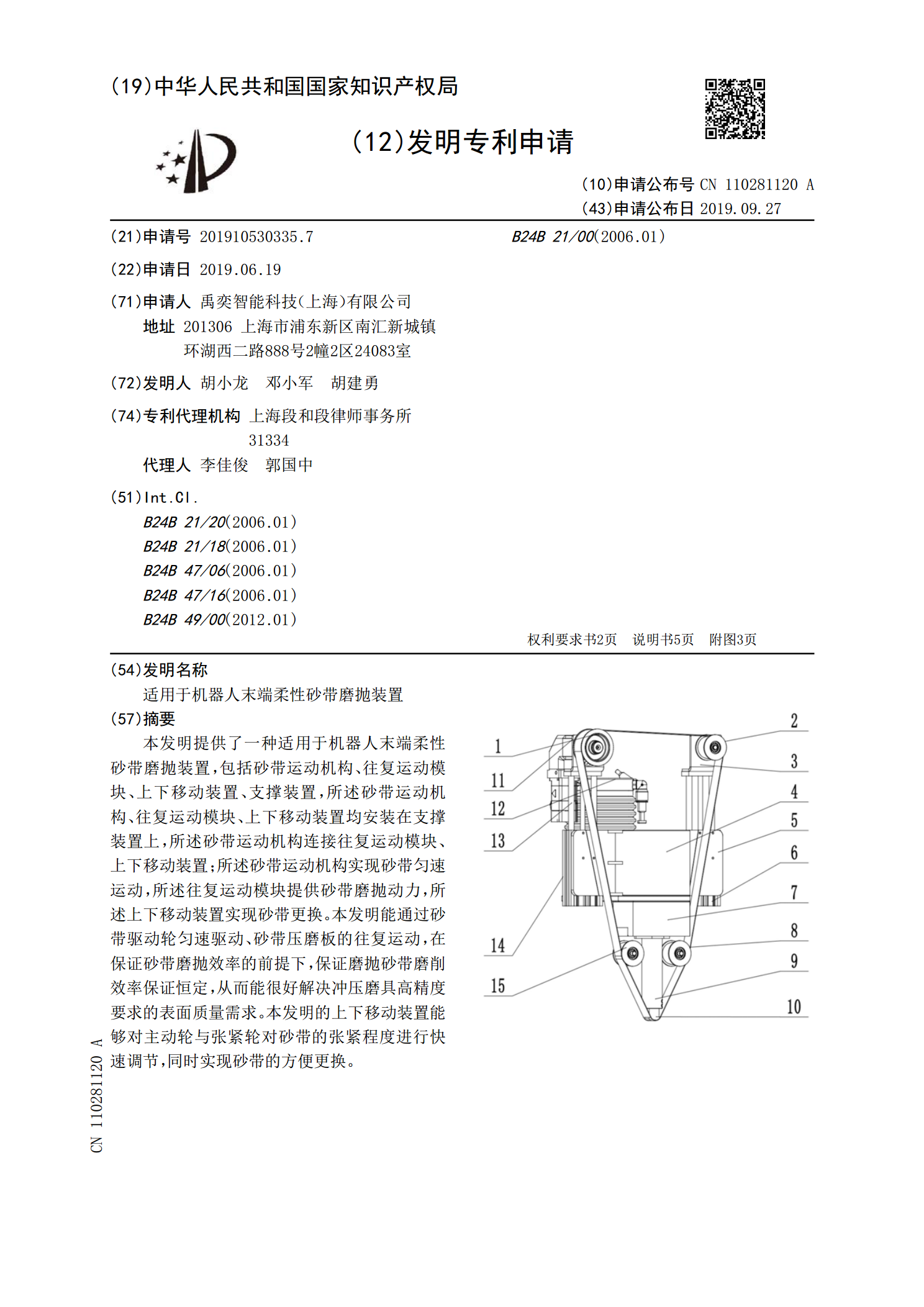
本发明提供了一种适用于机器人末端柔性砂带磨抛装置,包括砂带运动机构、往复运动模块、上下移动装置、支撑装置,所述砂带运动机构、往复运动模块、上下移动装置均安装在支撑装置上,所述砂带运动机构连接往复运动模块、上下移动装置;所述砂带运动机构实现砂带匀速运动,所述往复运动模块提供砂带磨抛动力,所述上下移动装置实现砂带更换。本发明能通过砂带驱动轮匀速驱动、砂带压磨板的往复运动,在保证砂带磨抛效率的前提下,保证磨抛砂带磨削效率保证恒定,从而能很好解决冲压磨具高精度要求的表面质量需求。本发明的上下移动装置能够对主动轮与
一种用于机器人抛光打磨的砂带机.pdf
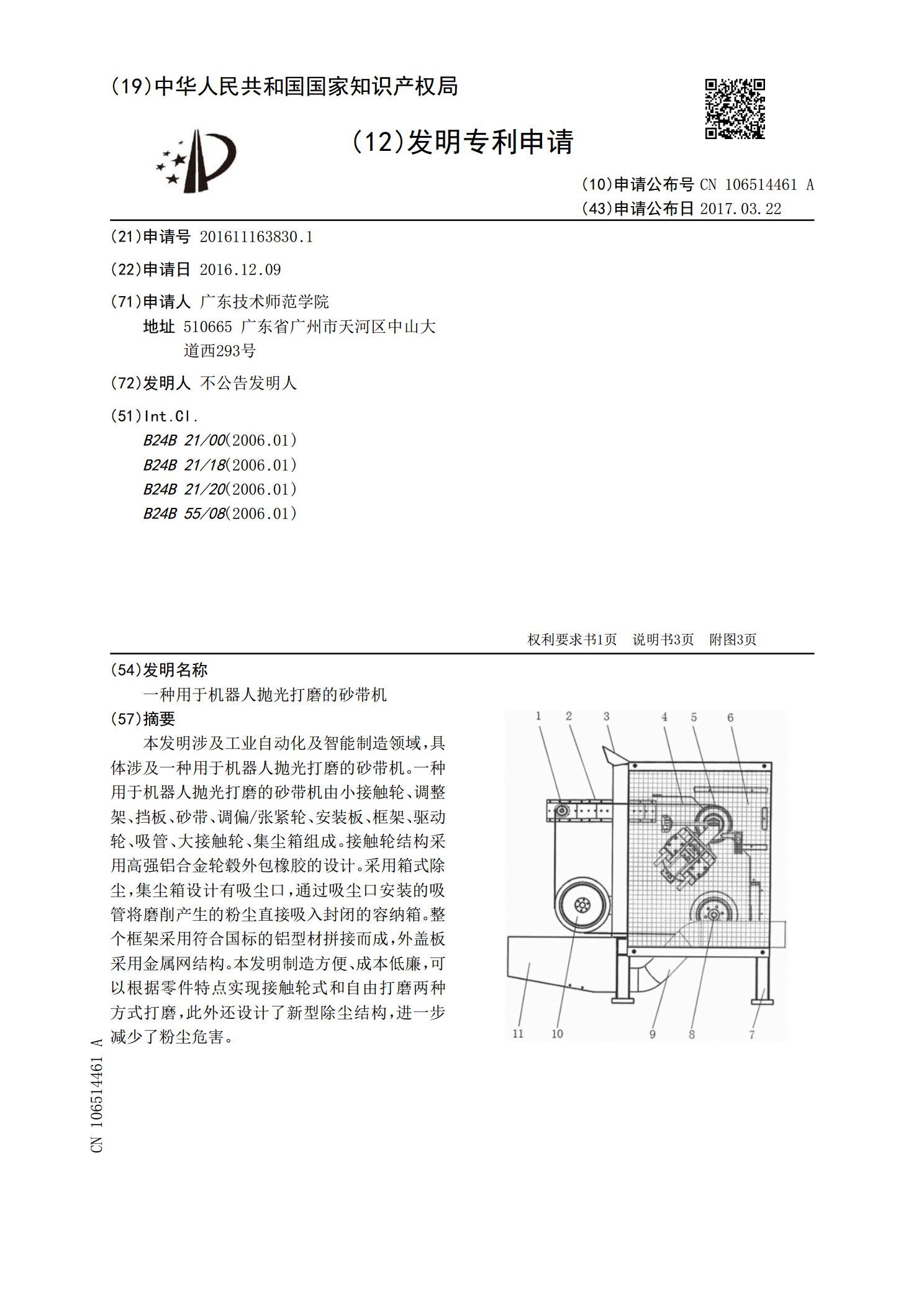
本发明涉及工业自动化及智能制造领域,具体涉及一种用于机器人抛光打磨的砂带机。一种用于机器人抛光打磨的砂带机由小接触轮、调整架、挡板、砂带、调偏/张紧轮、安装板、框架、驱动轮、吸管、大接触轮、集尘箱组成。接触轮结构采用高强铝合金轮毂外包橡胶的设计。采用箱式除尘,集尘箱设计有吸尘口,通过吸尘口安装的吸管将磨削产生的粉尘直接吸入封闭的容纳箱。整个框架采用符合国标的铝型材拼接而成,外盖板采用金属网结构。本发明制造方便、成本低廉,可以根据零件特点实现接触轮式和自由打磨两种方式打磨,此外还设计了新型除尘结构,进一步减