
行走装置、清洁机器人及清洁机器人的行走方法.pdf

一吃****瀚文

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
行走装置、清洁机器人及清洁机器人的行走方法.pdf
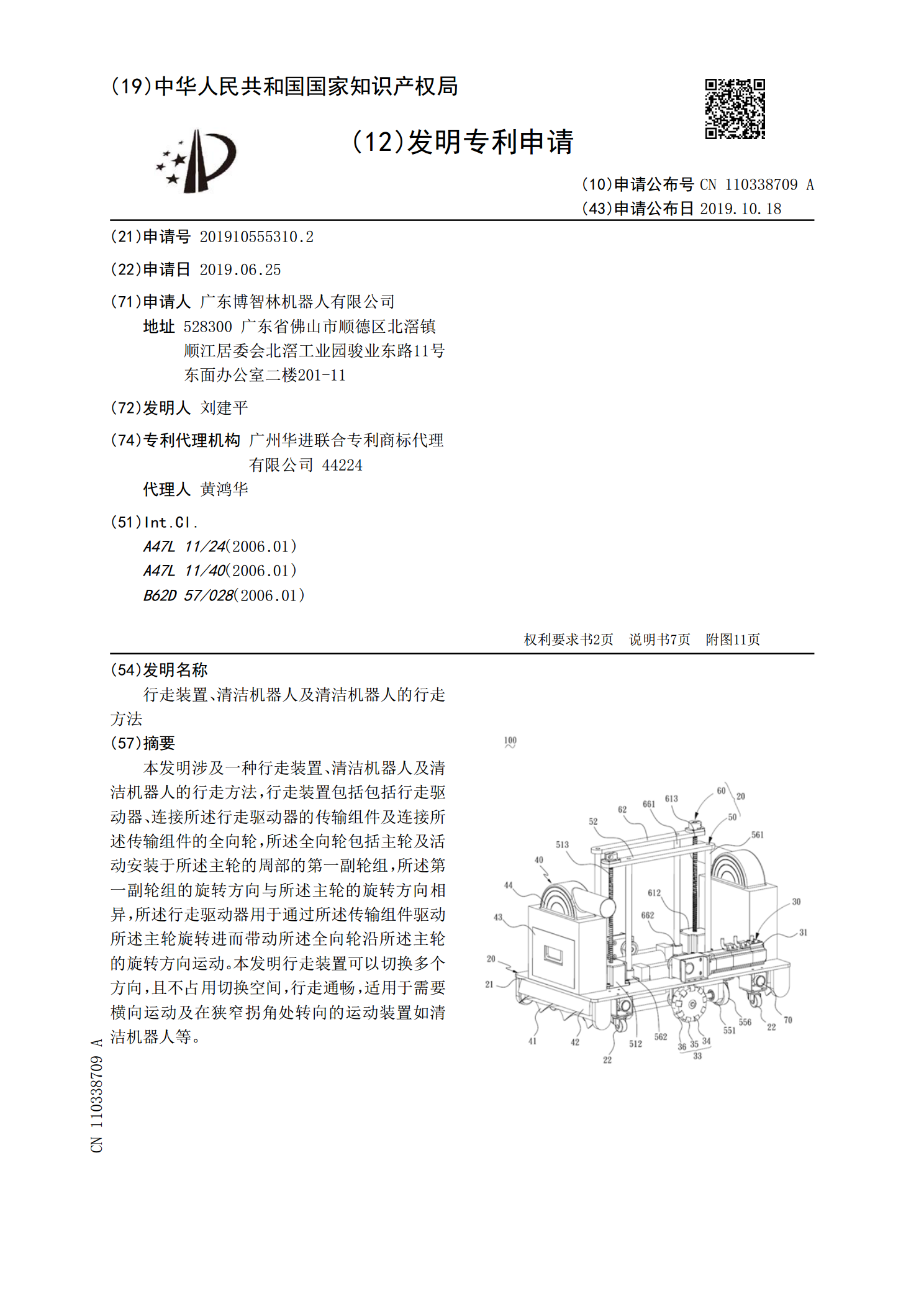
本发明涉及一种行走装置、清洁机器人及清洁机器人的行走方法,行走装置包括包括行走驱动器、连接所述行走驱动器的传输组件及连接所述传输组件的全向轮,所述全向轮包括主轮及活动安装于所述主轮的周部的第一副轮组,所述第一副轮组的旋转方向与所述主轮的旋转方向相异,所述行走驱动器用于通过所述传输组件驱动所述主轮旋转进而带动所述全向轮沿所述主轮的旋转方向运动。本发明行走装置可以切换多个方向,且不占用切换空间,行走通畅,适用于需要横向运动及在狭窄拐角处转向的运动装置如清洁机器人等。
一种清洁机器人的行走方法.pdf
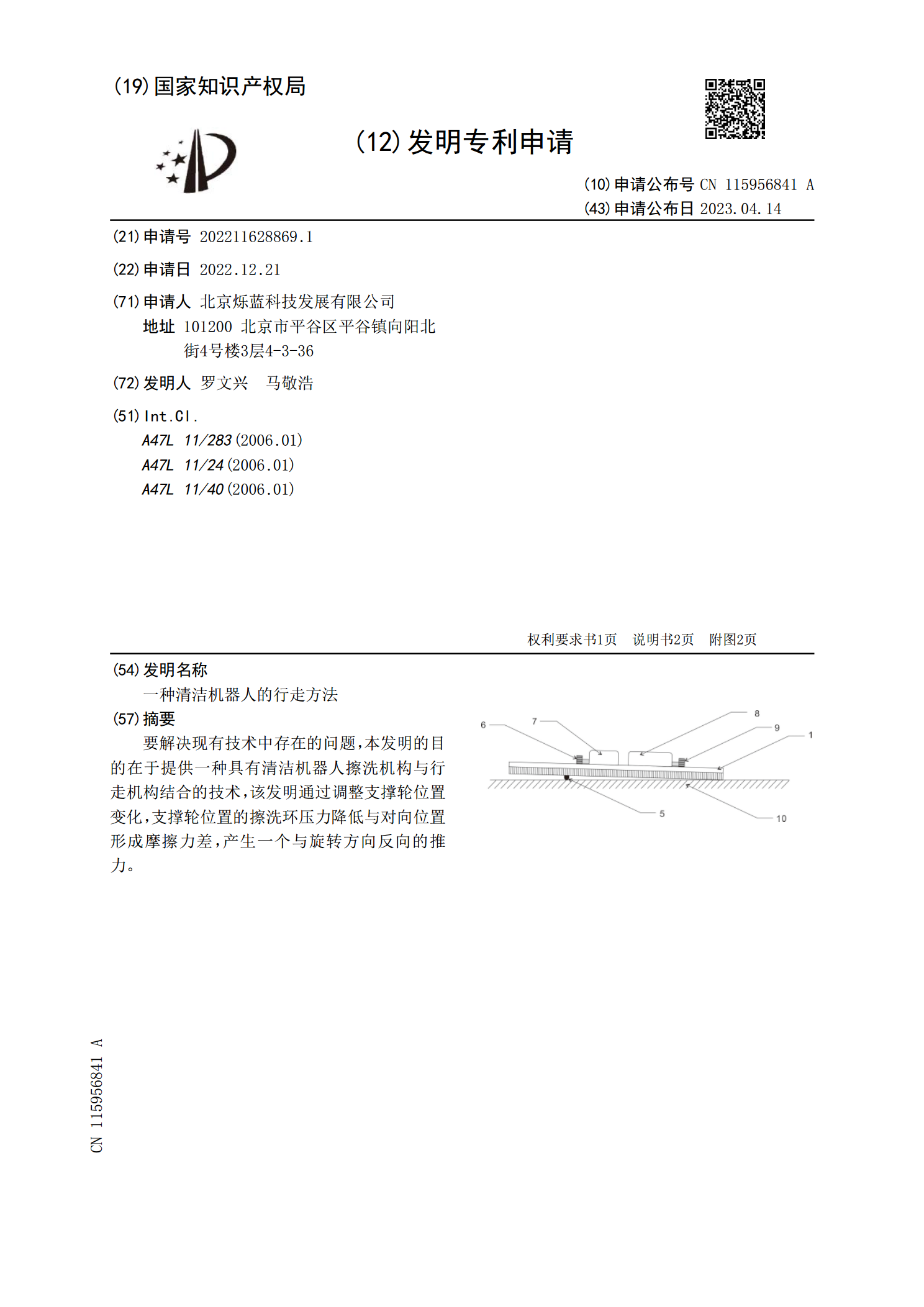
要解决现有技术中存在的问题,本发明的目的在于提供一种具有清洁机器人擦洗机构与行走机构结合的技术,该发明通过调整支撑轮位置变化,支撑轮位置的擦洗环压力降低与对向位置形成摩擦力差,产生一个与旋转方向反向的推力。
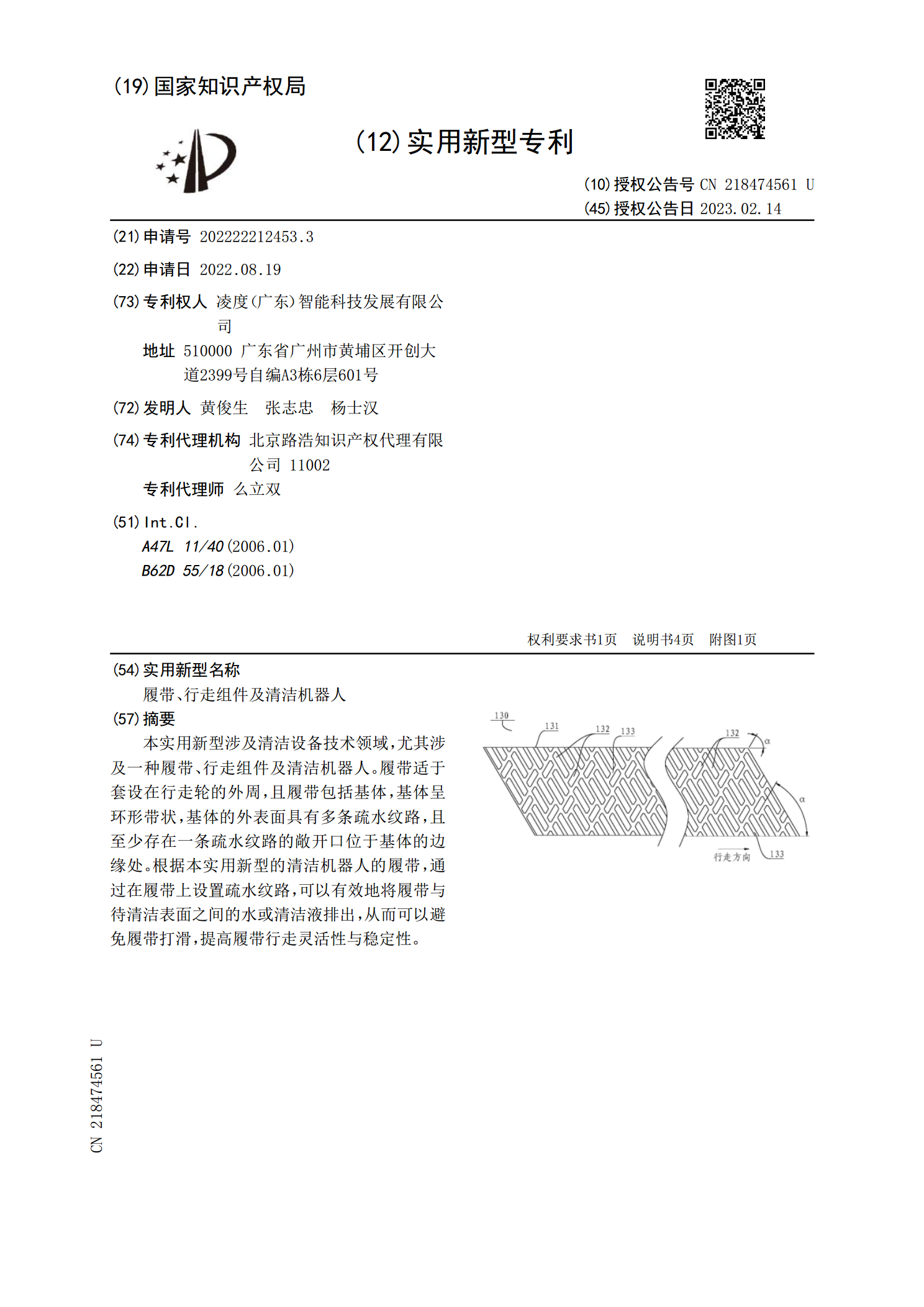
履带、行走组件及清洁机器人.pdf
本实用新型涉及清洁设备技术领域,尤其涉及一种履带、行走组件及清洁机器人。履带适于套设在行走轮的外周,且履带包括基体,基体呈环形带状,基体的外表面具有多条疏水纹路,且至少存在一条疏水纹路的敞开口位于基体的边缘处。根据本实用新型的清洁机器人的履带,通过在履带上设置疏水纹路,可以有效地将履带与待清洁表面之间的水或清洁液排出,从而可以避免履带打滑,提高履带行走灵活性与稳定性。

一种机器人行走的控制方法、控制装置及沙滩清洁机器人.pdf
本发明公开了一种机器人行走的控制方法、控制装置及沙滩清洁机器人,属于机器人技术领域。方法包括:在行走过程中,获取前方的足迹信息;根据所述足迹信息确定所述机器人已走过的行走痕迹;控制所述机器人相对所述行走痕迹偏移预设的距离,并沿所述行走痕迹的延伸方向继续行走。本发明沙滩清洁机器人的控制装置能够利用机器人在沙地上行走留下的痕迹控制机器人的行走,防止机器人在已走过的地方重复行走,使得机器人能够遍历整个工作区域。并且,沙滩清洁机器人能够自动清理沙滩表面比沙粒大的垃圾。
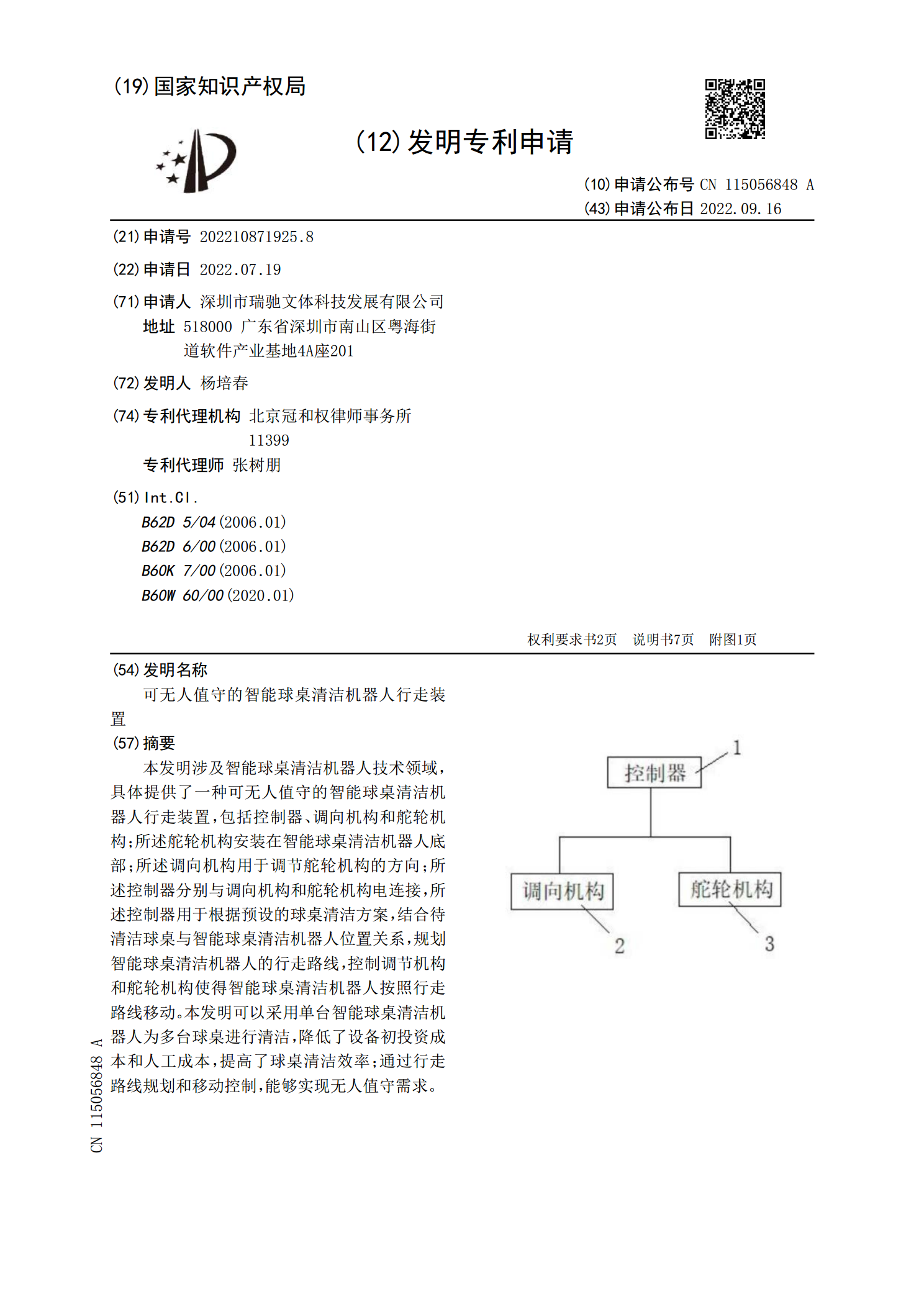
可无人值守的智能球桌清洁机器人行走装置.pdf
本发明涉及智能球桌清洁机器人技术领域,具体提供了一种可无人值守的智能球桌清洁机器人行走装置,包括控制器、调向机构和舵轮机构;所述舵轮机构安装在智能球桌清洁机器人底部;所述调向机构用于调节舵轮机构的方向;所述控制器分别与调向机构和舵轮机构电连接,所述控制器用于根据预设的球桌清洁方案,结合待清洁球桌与智能球桌清洁机器人位置关系,规划智能球桌清洁机器人的行走路线,控制调节机构和舵轮机构使得智能球桌清洁机器人按照行走路线移动。本发明可以采用单台智能球桌清洁机器人为多台球桌进行清洁,降低了设备初投资成本和人工成本,