
可无人值守的智能球桌清洁机器人行走装置.pdf

Ja****44


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
可无人值守的智能球桌清洁机器人行走装置.pdf
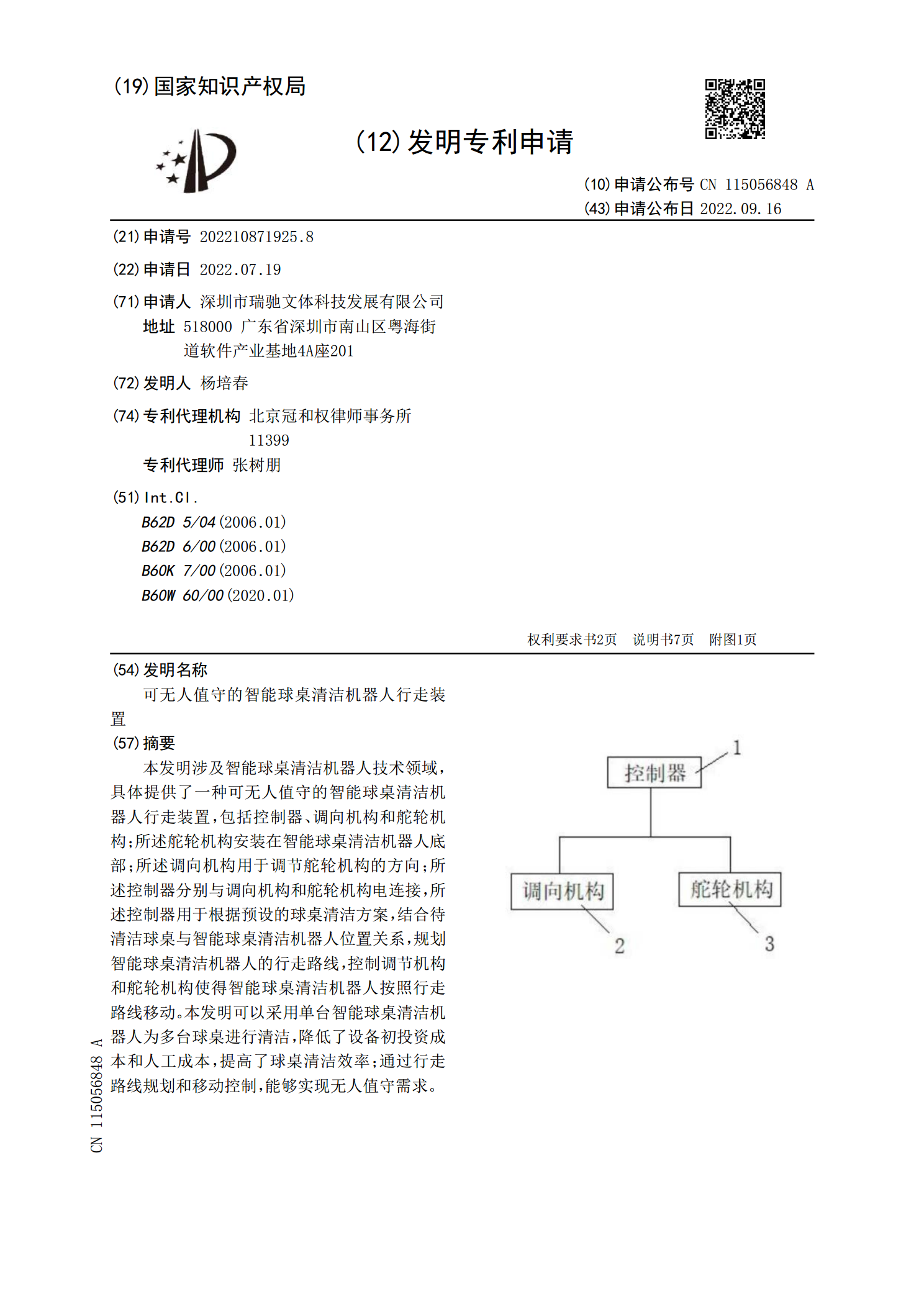
本发明涉及智能球桌清洁机器人技术领域,具体提供了一种可无人值守的智能球桌清洁机器人行走装置,包括控制器、调向机构和舵轮机构;所述舵轮机构安装在智能球桌清洁机器人底部;所述调向机构用于调节舵轮机构的方向;所述控制器分别与调向机构和舵轮机构电连接,所述控制器用于根据预设的球桌清洁方案,结合待清洁球桌与智能球桌清洁机器人位置关系,规划智能球桌清洁机器人的行走路线,控制调节机构和舵轮机构使得智能球桌清洁机器人按照行走路线移动。本发明可以采用单台智能球桌清洁机器人为多台球桌进行清洁,降低了设备初投资成本和人工成本,

一种可无人值守的智能桌面清洁机器人.pdf
本发明公开了一种可无人值守的智能桌面清洁机器人,包括:清洁机器人装置,该清洁机器人装置包括第一底盘模块、第二底盘模块以及智能清洁模块,第一底盘模块、第二底盘模块安装在智能清洁模块的底部,所以在使用该可无人值守的智能桌面清洁机器人时,通过智能清洁模块启动第一底盘模块、第二底盘模块沿着台球桌移动,第一底盘模块、第二底盘模块位于台球桌的两侧,使得智能清洁模块位于台球桌的上方,可以对台球桌上的台呢进行清洁,第一底盘模块、第二底盘模块移动起来,使得智能清洁模块对整个台呢进行智能清洁,无需值班操作人员值守看护该智能桌
行走装置、清洁机器人及清洁机器人的行走方法.pdf
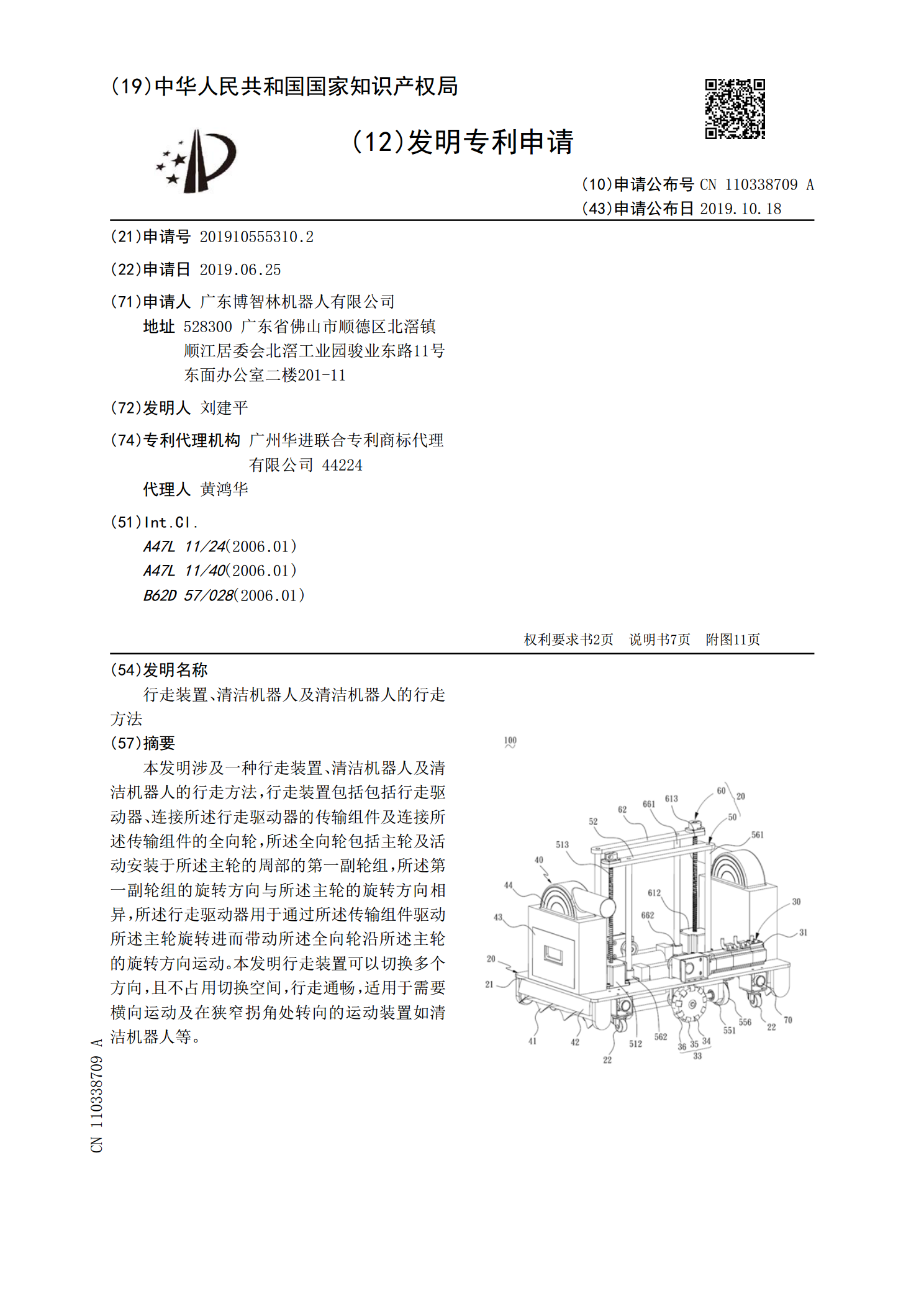
本发明涉及一种行走装置、清洁机器人及清洁机器人的行走方法,行走装置包括包括行走驱动器、连接所述行走驱动器的传输组件及连接所述传输组件的全向轮,所述全向轮包括主轮及活动安装于所述主轮的周部的第一副轮组,所述第一副轮组的旋转方向与所述主轮的旋转方向相异,所述行走驱动器用于通过所述传输组件驱动所述主轮旋转进而带动所述全向轮沿所述主轮的旋转方向运动。本发明行走装置可以切换多个方向,且不占用切换空间,行走通畅,适用于需要横向运动及在狭窄拐角处转向的运动装置如清洁机器人等。
基于无人值守的急救包智能获取方法及装置.pdf
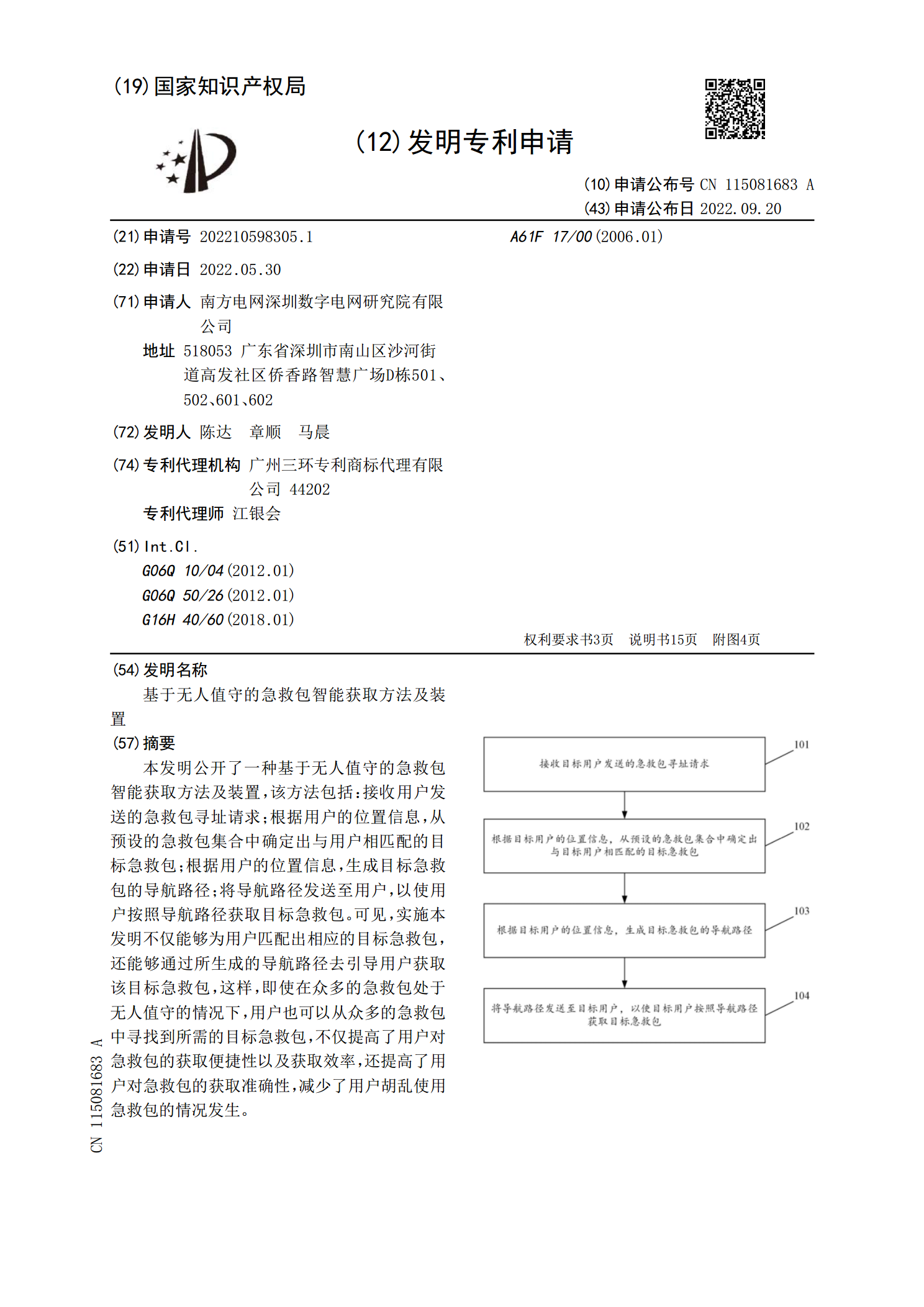
本发明公开了一种基于无人值守的急救包智能获取方法及装置,该方法包括:接收用户发送的急救包寻址请求;根据用户的位置信息,从预设的急救包集合中确定出与用户相匹配的目标急救包;根据用户的位置信息,生成目标急救包的导航路径;将导航路径发送至用户,以使用户按照导航路径获取目标急救包。可见,实施本发明不仅能够为用户匹配出相应的目标急救包,还能够通过所生成的导航路径去引导用户获取该目标急救包,这样,即使在众多的急救包处于无人值守的情况下,用户也可以从众多的急救包中寻找到所需的目标急救包,不仅提高了用户对急救包的获取便捷
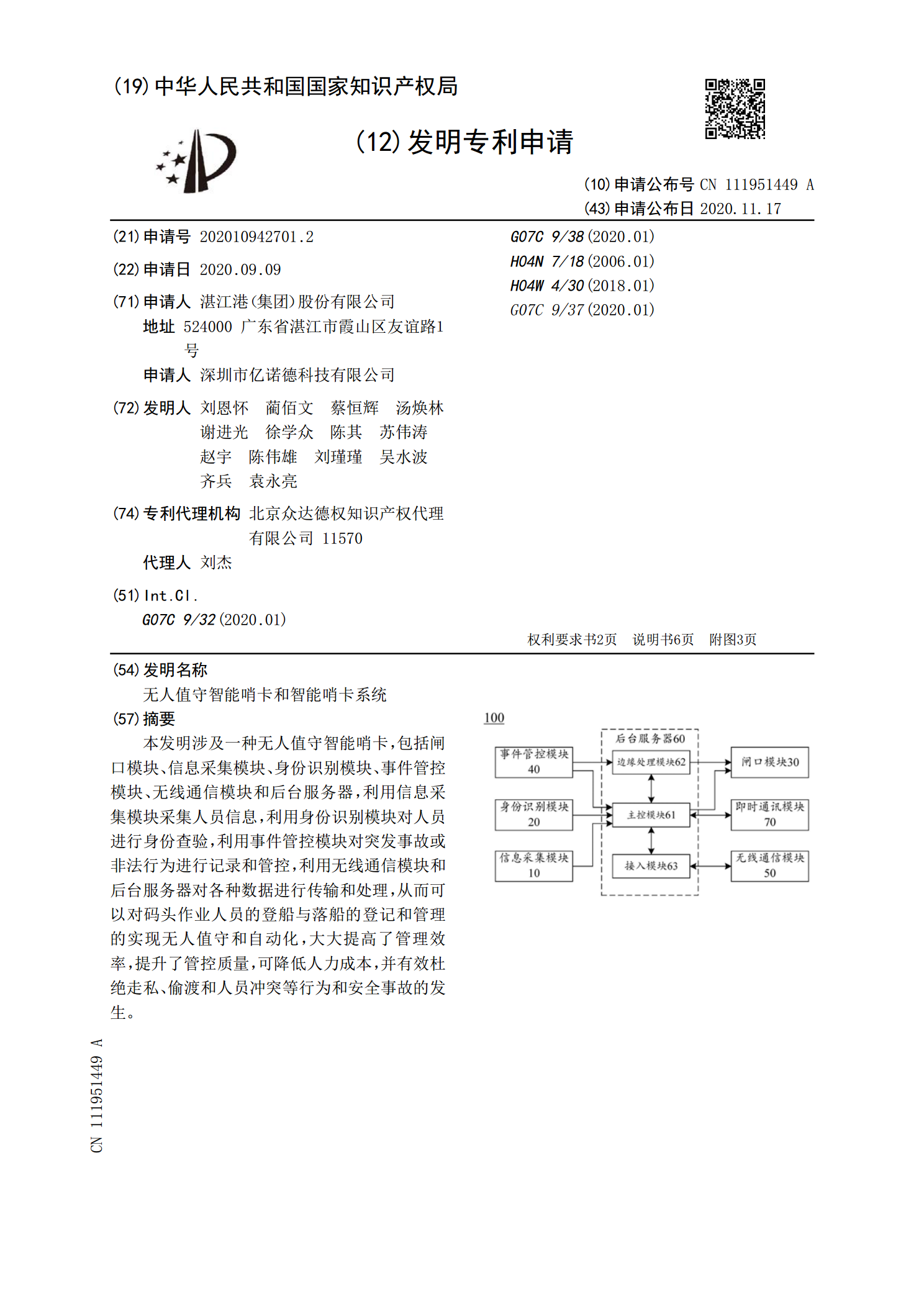
无人值守智能哨卡和智能哨卡系统.pdf
本发明涉及一种无人值守智能哨卡,包括闸口模块、信息采集模块、身份识别模块、事件管控模块、无线通信模块和后台服务器,利用信息采集模块采集人员信息,利用身份识别模块对人员进行身份查验,利用事件管控模块对突发事故或非法行为进行记录和管控,利用无线通信模块和后台服务器对各种数据进行传输和处理,从而可以对码头作业人员的登船与落船的登记和管理的实现无人值守和自动化,大大提高了管理效率,提升了管控质量,可降低人力成本,并有效杜绝走私、偷渡和人员冲突等行为和安全事故的发生。