
一种舵系统及其一体化微型电动舵机.pdf

Ja****23

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种舵系统及其一体化微型电动舵机.pdf
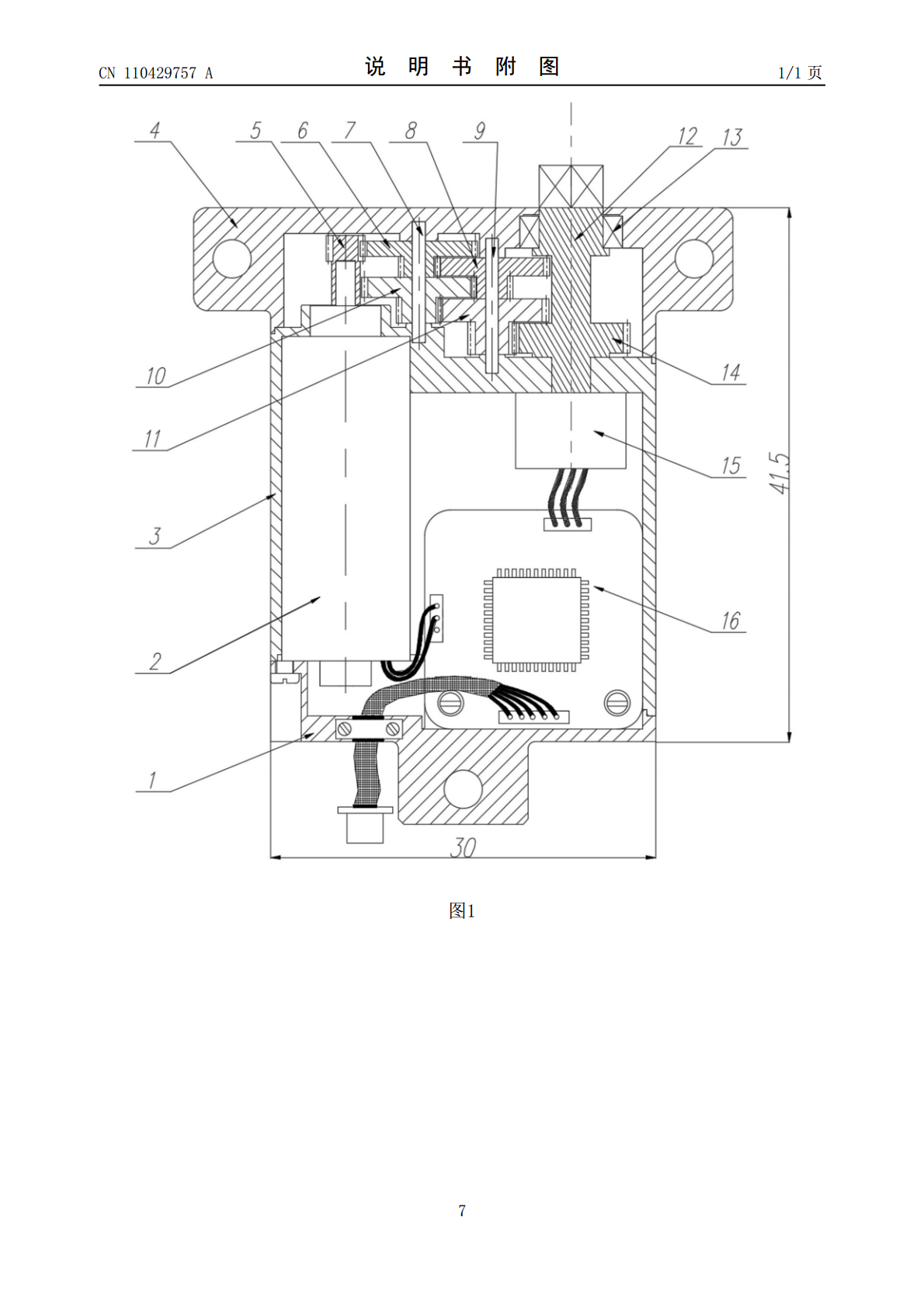
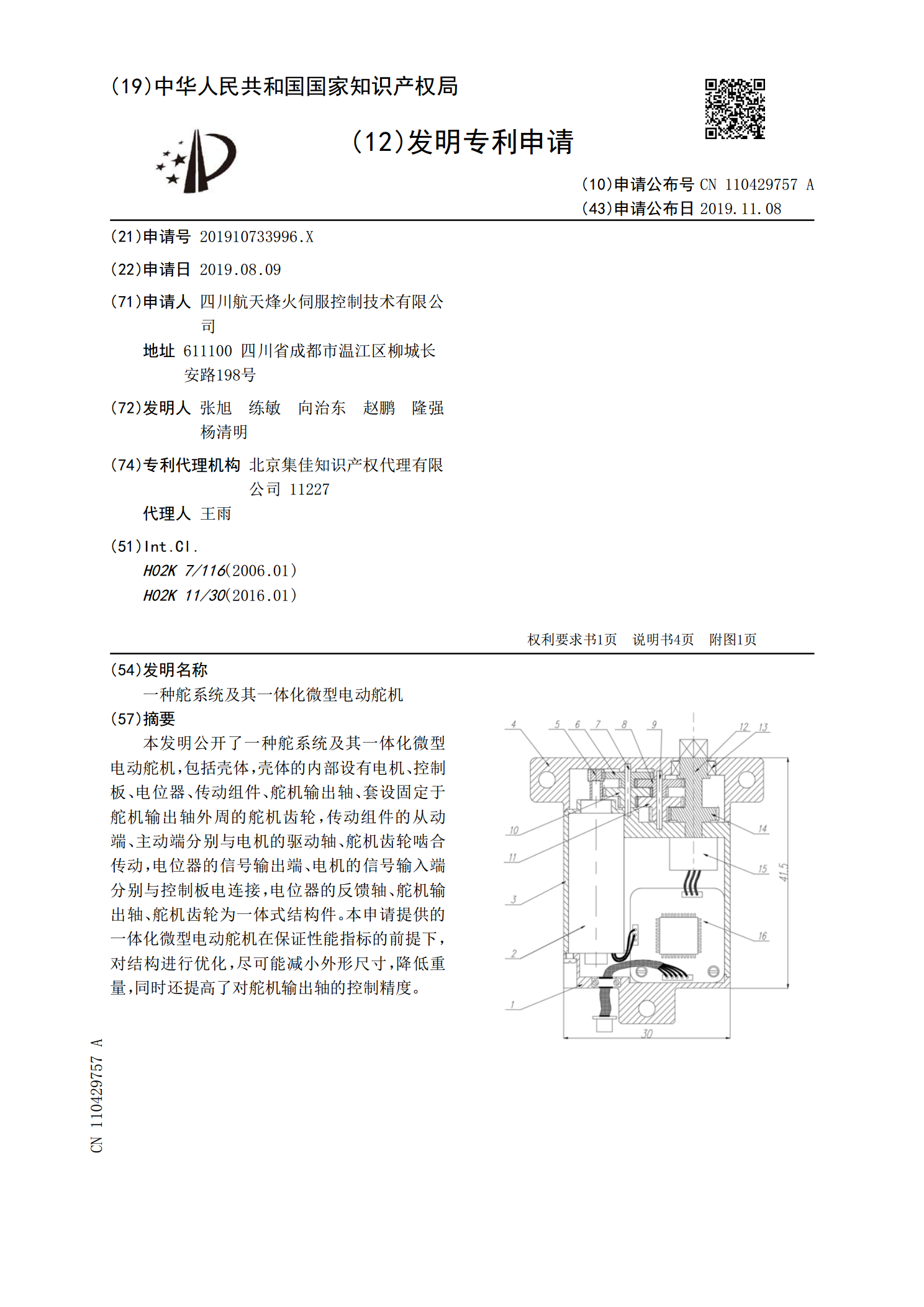
本发明公开了一种舵系统及其一体化微型电动舵机,包括壳体,壳体的内部设有电机、控制板、电位器、传动组件、舵机输出轴、套设固定于舵机输出轴外周的舵机齿轮,传动组件的从动端、主动端分别与电机的驱动轴、舵机齿轮啮合传动,电位器的信号输出端、电机的信号输入端分别与控制板电连接,电位器的反馈轴、舵机输出轴、舵机齿轮为一体式结构件。本申请提供的一体化微型电动舵机在保证性能指标的前提下,对结构进行优化,尽可能减小外形尺寸,降低重量,同时还提高了对舵机输出轴的控制精度。

多舵面集束式电动舵机系统及其控制方法.pdf
本发明涉及一种电动舵机系统及其控制方法,特别是一种多舵面集束式电动舵机系统及其控制方法,其包括限位部分、执行部分、传感部分和控制部分。所述限位部分包括中间体十字架和转接体。所述执行部分包括至少四个电机、若干齿轮和至少四根输出轴。所述传感部分包括至少四个转角位置传感器。依靠所述输出轴安装孔的限位功能,所述中间体十字架、所述输出轴和所述转接体之间的位置得到固定。所述转角位置传感器设置于所述转接体内腔。每个所述转角位置传感器通过转接体上的输出轴安装孔与相应的输出轴固接。与现有技术相比,本发明具有尺寸小、工艺性好
一种一体化微型舵系统.pdf
本发明公开了一种一体化微型舵系统,包括:电机(1)、齿轮减速器(2)、转向输出机构(3)、位置敏感机构(4)、控制板(5)及转接板(6);所述转向输出机构(3)包括第一基座(7)、第一锥齿轮(9)、第二锥齿轮(10)、第三锥齿轮(11)及输出轴(14),所述位置敏感机构(4)包括角位置传感器(19)和第五锥齿轮(20),所述第五锥齿轮(20)用于与所述第三锥齿轮(11)齿合,实现所述输出轴(14)的角度偏转,所述角位置传感器(19)用于识别所述角度偏转的信号并反馈给所述控制板(5),从而实现所述舵系统位置
一种电动舵机及其控制系统.pdf
本发明公开了一种电动舵机及其控制系统,包括尾舱舱体、硬件系统和飞控系统,所述硬件系统包括若干组舵机组件、舵机控制器,若干组所述舵机组件与舵机控制器分别连接通讯,所述飞控系统与舵机控制器连接通讯。本发明的优点在于:①本发明通过采用蜗轮蜗杆的结构形式制成减速传动机构,结构简单,技术成熟,成本可控;②采用电位计作为角位置传感器,反馈灵敏,能够接收舵偏角指令完成舵面角度跟踪;③将舵机组件模块化设计安装,可减少电动舵机的整体尺寸,有利于小型化、轻量化;④通过设置总线通讯及电源接口,具备CAN总线通讯功能,方便后续升
一种微型电动直线驱动伺服舵机.pdf
本发明公开了一种微型电动直线驱动伺服舵机,包括机架、电路板、减速电机、螺杆和滑块,电路板通过螺钉固定于机架下部,电路板的一面设置有碳膜电阻和铜皮,另一面设置有驱动电路及控制电路;减速电机通过螺钉固定于机架的一侧,螺杆固定于机架中并与减速电机保持平行,滑块与螺杆连接,机架上设有用于限定滑块运动轨迹的导轨,减速电机和螺杆的一端分别设置有相互啮合的齿轮,通过齿轮传动将力矩由减速电机传递至螺杆,以带动滑块沿着导轨滑动,滑块底部设置有与碳膜电阻和铜皮接触的电刷。本发明驱动伺服舵机结构简单紧凑,成本低,减速比可调,滑