
一种一体化微型舵系统.pdf

一只****iu

1/7

2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种一体化微型舵系统.pdf
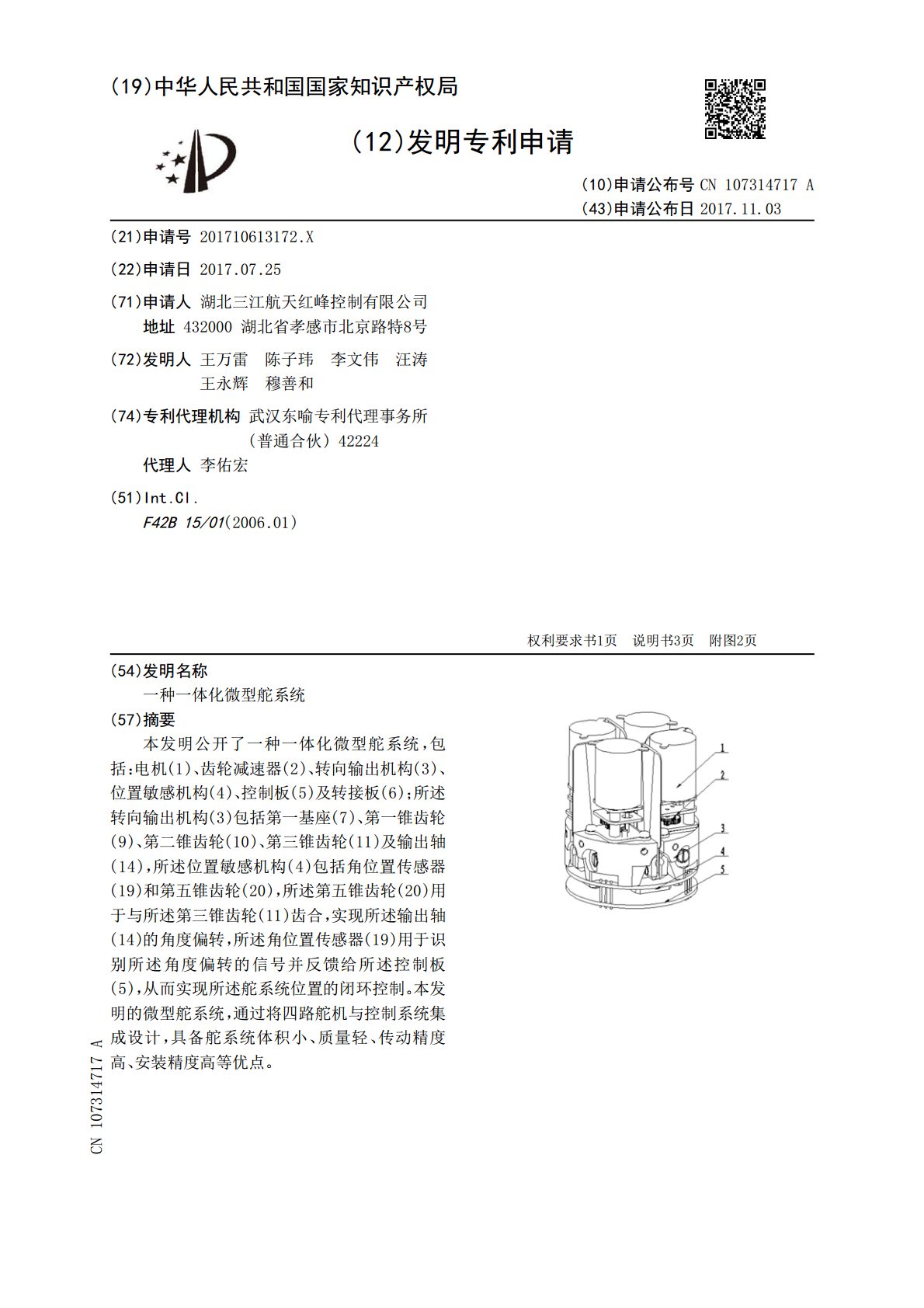
本发明公开了一种一体化微型舵系统,包括:电机(1)、齿轮减速器(2)、转向输出机构(3)、位置敏感机构(4)、控制板(5)及转接板(6);所述转向输出机构(3)包括第一基座(7)、第一锥齿轮(9)、第二锥齿轮(10)、第三锥齿轮(11)及输出轴(14),所述位置敏感机构(4)包括角位置传感器(19)和第五锥齿轮(20),所述第五锥齿轮(20)用于与所述第三锥齿轮(11)齿合,实现所述输出轴(14)的角度偏转,所述角位置传感器(19)用于识别所述角度偏转的信号并反馈给所述控制板(5),从而实现所述舵系统位置
一种舵系统及其一体化微型电动舵机.pdf
本发明公开了一种舵系统及其一体化微型电动舵机,包括壳体,壳体的内部设有电机、控制板、电位器、传动组件、舵机输出轴、套设固定于舵机输出轴外周的舵机齿轮,传动组件的从动端、主动端分别与电机的驱动轴、舵机齿轮啮合传动,电位器的信号输出端、电机的信号输入端分别与控制板电连接,电位器的反馈轴、舵机输出轴、舵机齿轮为一体式结构件。本申请提供的一体化微型电动舵机在保证性能指标的前提下,对结构进行优化,尽可能减小外形尺寸,降低重量,同时还提高了对舵机输出轴的控制精度。

一种扁平式一体化复合舵系统.pdf
本发明公开了一种扁平式一体化复合舵系统,包括基座体及共同安装在所述基座体上的电机、齿轮减速器、复合丝杠组件和摇臂组件,所述复合丝杠组件包括滚珠丝杠I、滚珠螺母I、滚珠丝杠II和滚珠螺母II,所述滚珠丝杠I通过所述齿轮减速器与所述电机连接,所述滚珠螺母I安装在所述滚珠丝杠I上,并且所述滚珠螺母I与所述滚珠螺母II固定连接在一起,所述滚珠螺母I上设置有滑块I,所述基座体上设置有防转导轨,所述滑块I安装在所述防转导轨上;所述摇臂组件包括连杆、滑块II和摇臂。本发明的一种扁平式一体化复合舵系统,实现舵系统与机翼一

气动微型观光潜艇十字舵系统.pdf
本发明的目的在于提供气动微型观光潜艇十字舵系统,包括舵叶、舵杆、上舵承、下舵承、舵柄、滑槽、齿条、齿轮、步进电机、液压缸、活塞、液压缸活塞杆,舵叶、舵杆、下舵承、上舵承依次相连,由舵叶、舵杆、下舵承、上舵承组成的机构共有两组,两组由舵叶、舵杆、下舵承、上舵承组成的机构均由上舵承通过连杆安装在舵柄的左右两侧,步进电机连接齿轮,齿轮与齿条啮合,齿条位于机座滑槽上,齿条和齿条支出杆相连,齿条支出杆、液压缸活塞杆、活塞、液压缸依次相连,液压缸与舵柄相连。本发明可实现潜艇水下转向、升降等动作。

一种舵系统锁定装置.pdf
本发明公开了一种舵系统锁定装置,包括电机、齿轮传动机构、螺杆螺母副机构、解锁控制行程开关、解锁状态指示行程开关、锁定控制行程开关、锁定状态指示行程开关、压板、限位块和电连接器;电机的输出端连接齿轮传动机构的一端,齿轮传动机构的另一端连接螺杆螺母副机构的螺杆端,螺杆螺母副机构的螺母端连接限位块,通过限位块伸出卡紧与舵机连接的锁紧摇臂实现舵系统锁定,反之通过限位块缩进释放锁紧摇臂实现舵系统解锁。解锁控制行程开关和锁定控制行程开关串接于电机的控制回路,用于控制电机回路开断。本发明可实现锁定、解锁状态的反复转换,