
一种用于飞机前轮电动转弯和减摆的复合控制方法.pdf

一条****涛k

1/8
2/8

3/8
4/8
5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于飞机前轮电动转弯和减摆的复合控制方法.pdf
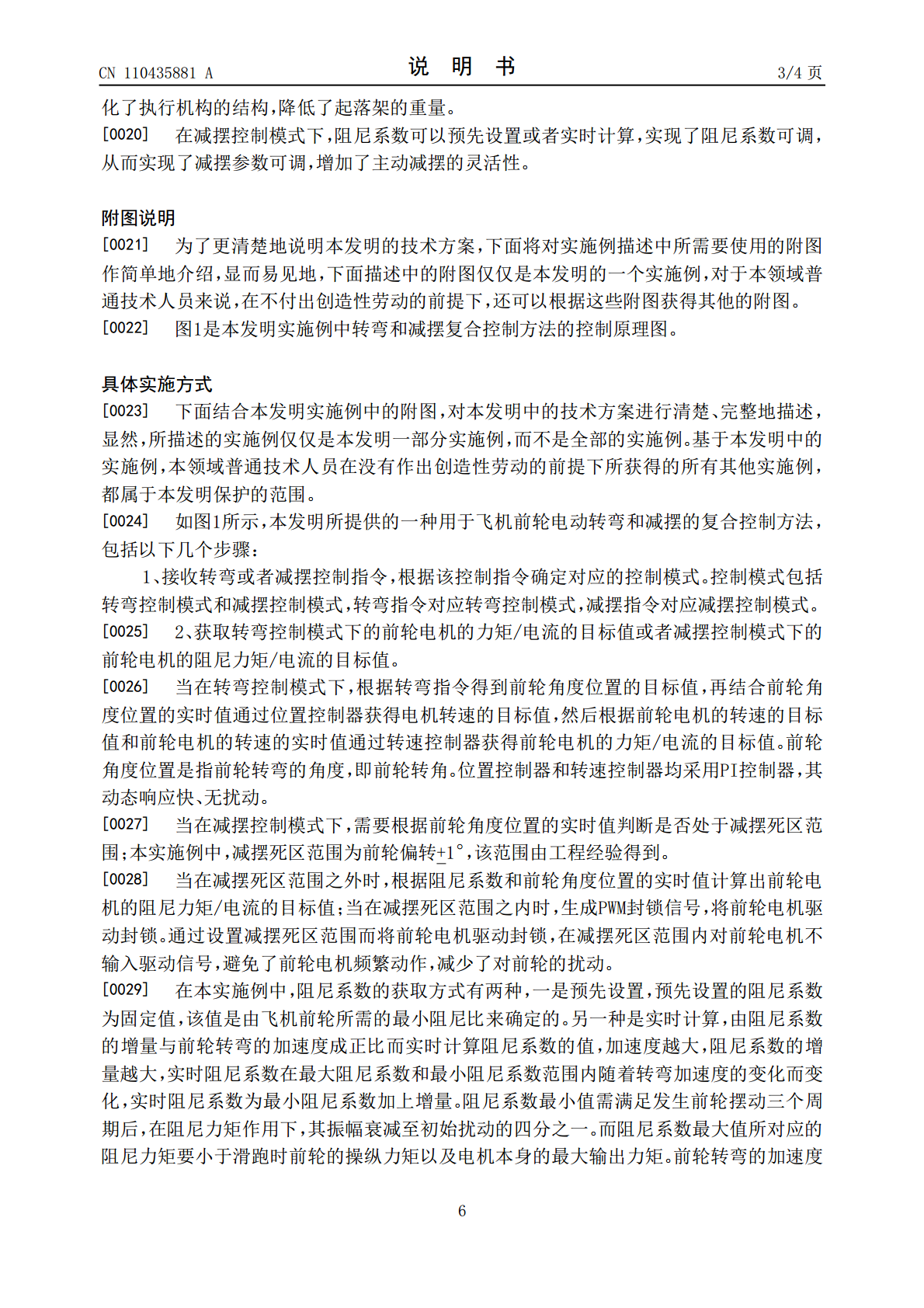
本发明公开了一种用于飞机前轮电动转弯和减摆的复合控制方法,涉及飞机转弯和减摆的控制技术。所述复合控制方法,通过不同的控制指令确定不同的控制模式,在转弯控制模式下通过闭环控制获得电机力矩/电流的目标值,在减摆控制模式下通过阻尼计算获得阻尼力矩/电流的目标值,再根据该目标值通过同一力矩/电流控制器生成PWM调节信号,最后根据PWM调节信号通过同一电机驱动单元实现对同一电机的运行控制,达到转弯或者减摆的目的;通过该控制方法使转弯和减摆功能共用一套电机执行机构,简化了执行机构的结构,降低了起落架的重量。

一种飞机前轮转弯控制方法.pdf
本申请属于飞机前轮转弯控制技术领域,具体涉及一种飞机前轮转弯控制方法,包括以下步骤:判断飞机是否处于空中;若飞机处于处于空中,则设置飞机前轮处于阻尼减摆状态;若飞机未处于空中,则判断飞机前轮是否处于大角度牵引状态,以及判断飞机是否处于弹射位置,若飞机前轮处于大角度牵引状态,或者飞机处于弹射位置,则设置飞机前轮处于阻尼减摆状态;否则,设置飞机前轮处于动力转弯状态。
用于飞机前轮转弯系统的低泄漏液压减摆补偿回路.pdf
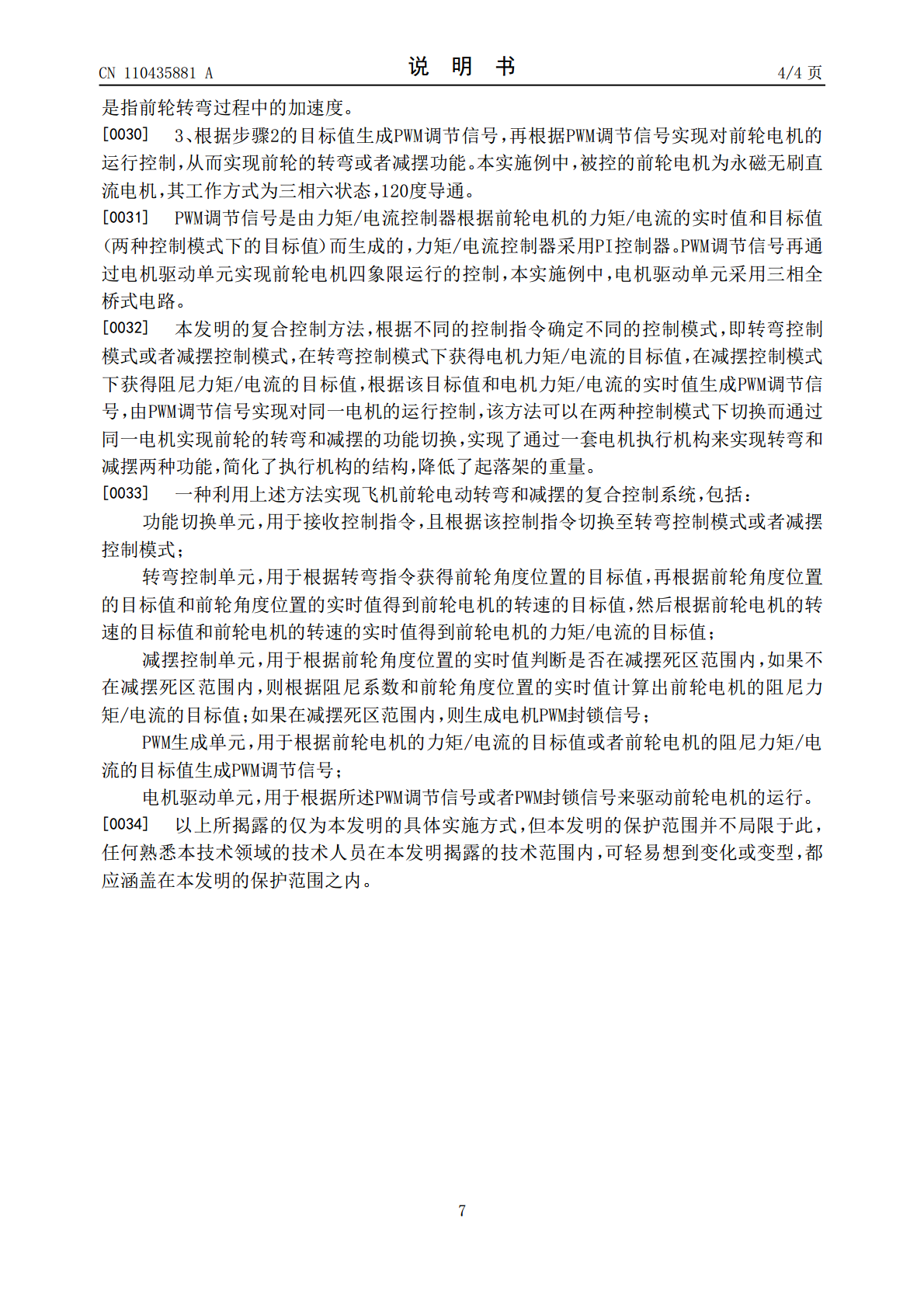
本发明涉及用于飞机前轮转弯系统的低泄漏液压减摆补偿回路。该液压减摆补偿回路包括转弯作动器、压力敏感装置、卸荷阀、防泄漏装置、以及补偿器;补偿器中存储有液压流量和液压压力,防泄漏装置设置在补偿器的出口,卸荷阀设置在飞机液压系统的回油路处,液压流量在卸荷阀产生的背压作用下经防泄漏装置进入补偿器,并在补偿器的作用下形成所需的液压压力,压力敏感装置设置在转弯作动器的左腔和右腔处,当转弯作动器的至少一腔压力超过压力阈值时,该腔压力经压力敏感装置控制防泄漏装置的开启,从而使补偿器中的液压流量流出补偿器。该液压减摆补偿
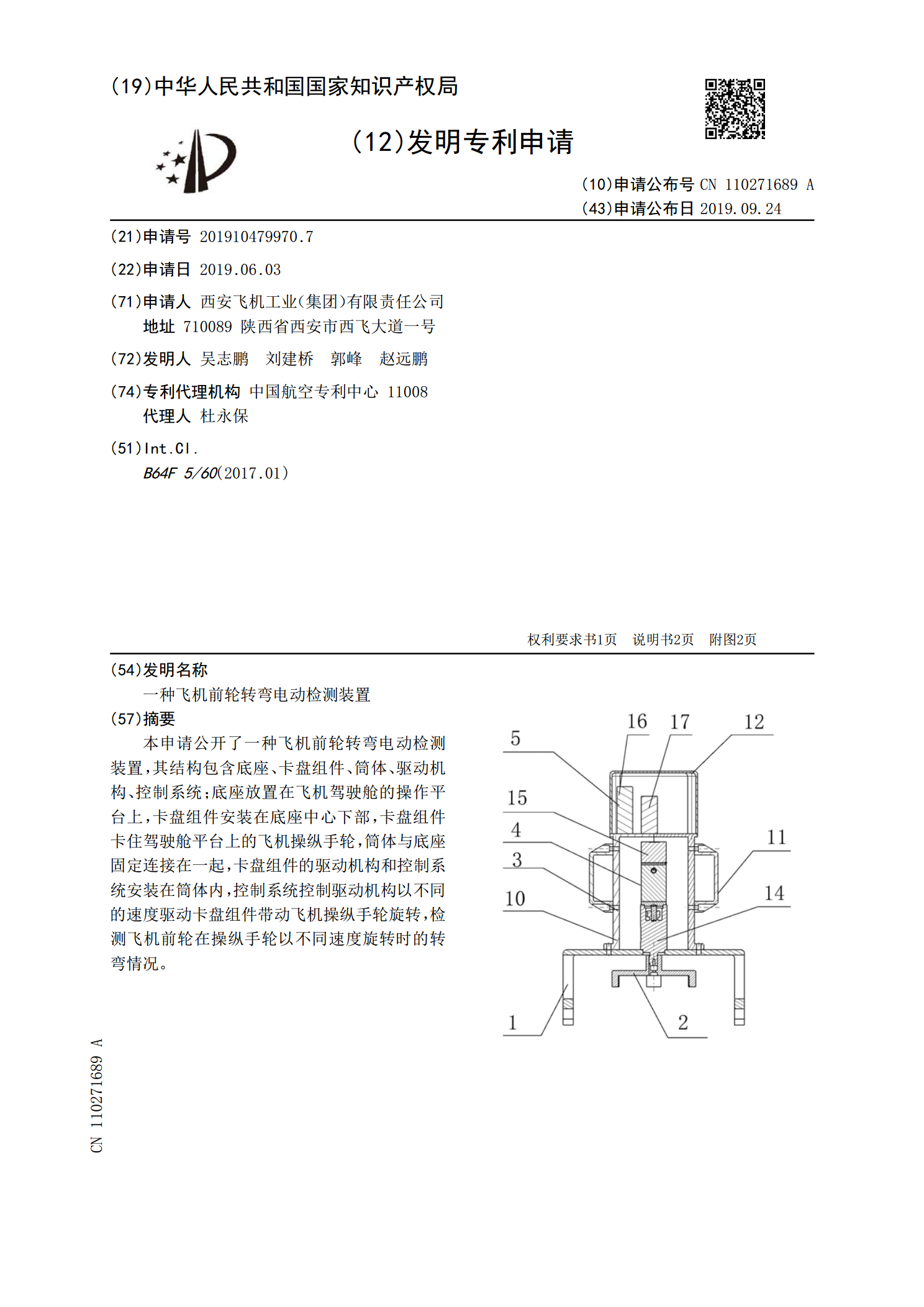
一种飞机前轮转弯电动检测装置.pdf
本申请公开了一种飞机前轮转弯电动检测装置,其结构包含底座、卡盘组件、筒体、驱动机构、控制系统;底座放置在飞机驾驶舱的操作平台上,卡盘组件安装在底座中心下部,卡盘组件卡住驾驶舱平台上的飞机操纵手轮,筒体与底座固定连接在一起,卡盘组件的驱动机构和控制系统安装在筒体内,控制系统控制驱动机构以不同的速度驱动卡盘组件带动飞机操纵手轮旋转,检测飞机前轮在操纵手轮以不同速度旋转时的转弯情况。
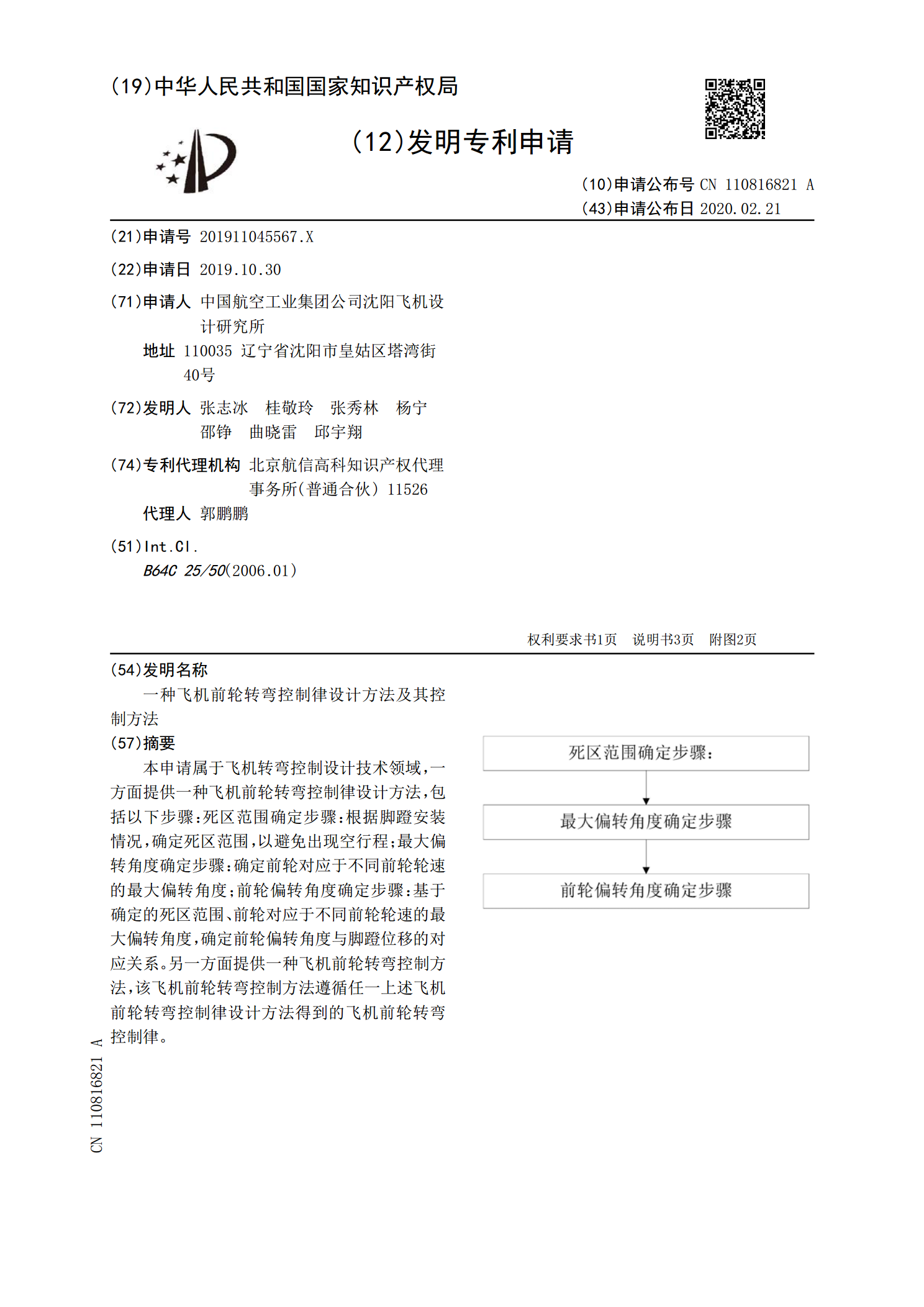
一种飞机前轮转弯控制律设计方法及其控制方法.pdf
本申请属于飞机转弯控制设计技术领域,一方面提供一种飞机前轮转弯控制律设计方法,包括以下步骤:死区范围确定步骤:根据脚蹬安装情况,确定死区范围,以避免出现空行程;最大偏转角度确定步骤:确定前轮对应于不同前轮轮速的最大偏转角度;前轮偏转角度确定步骤:基于确定的死区范围、前轮对应于不同前轮轮速的最大偏转角度,确定前轮偏转角度与脚蹬位移的对应关系。另一方面提供一种飞机前轮转弯控制方法,该飞机前轮转弯控制方法遵循任一上述飞机前轮转弯控制律设计方法得到的飞机前轮转弯控制律。