
轮毂四驱纯电动汽车扭矩矢量控制系统及控制方法.pdf

努力****元恺

1/8

2/8
3/8
4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
轮毂四驱纯电动汽车扭矩矢量控制系统及控制方法.pdf
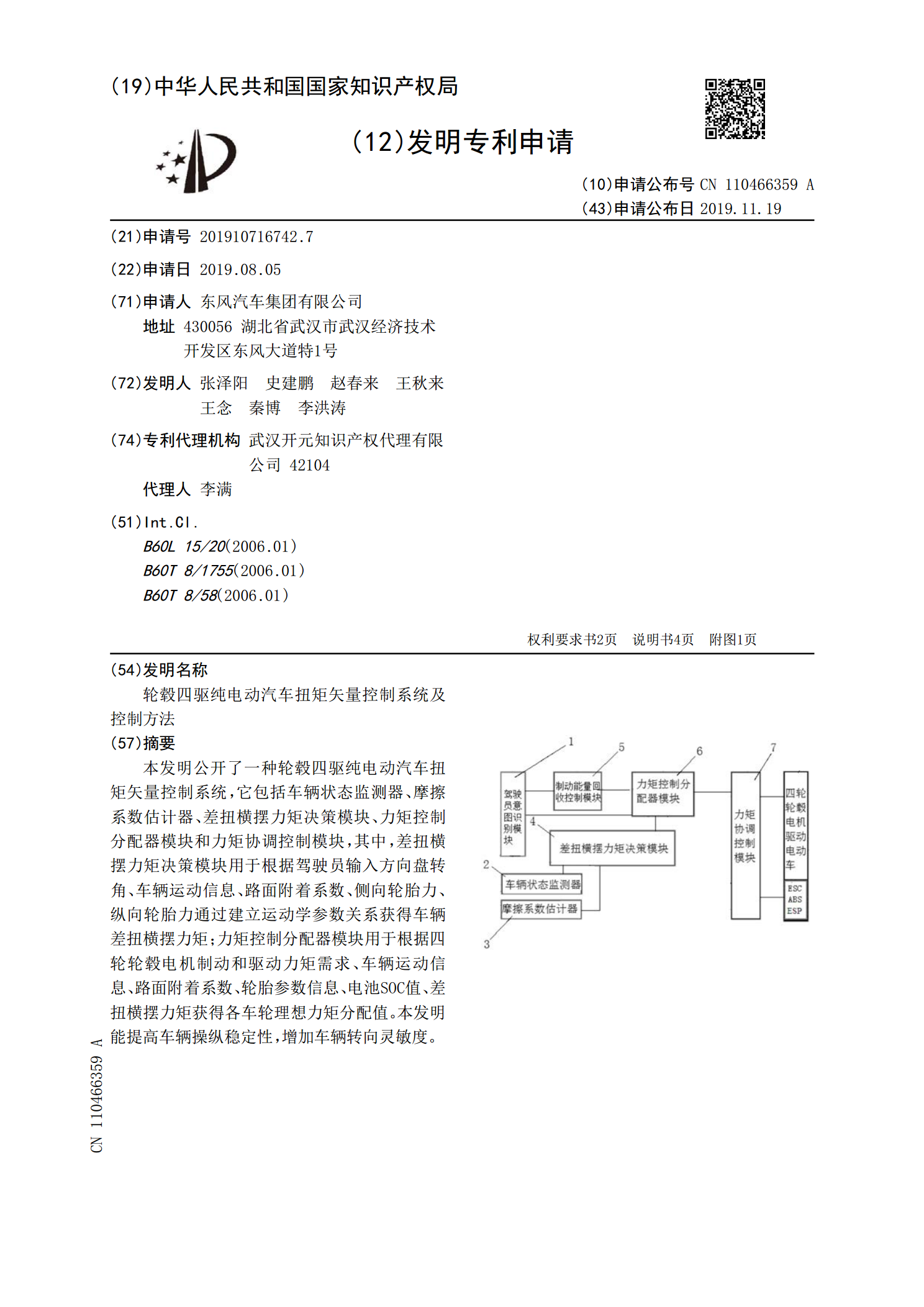
本发明公开了一种轮毂四驱纯电动汽车扭矩矢量控制系统,它包括车辆状态监测器、摩擦系数估计器、差扭横摆力矩决策模块、力矩控制分配器模块和力矩协调控制模块,其中,差扭横摆力矩决策模块用于根据驾驶员输入方向盘转角、车辆运动信息、路面附着系数、侧向轮胎力、纵向轮胎力通过建立运动学参数关系获得车辆差扭横摆力矩;力矩控制分配器模块用于根据四轮轮毂电机制动和驱动力矩需求、车辆运动信息、路面附着系数、轮胎参数信息、电池SOC值、差扭横摆力矩获得各车轮理想力矩分配值。本发明能提高车辆操纵稳定性,增加车辆转向灵敏度。

四驱EV电动车扭矩矢量控制方法.pdf
本发明公开了一种四轮EV电动车扭矩矢量控制方法,其包括:S10、计算前轴分配扭矩和后轴分配扭矩;S20、计算左轮分配扭矩和右轮分配扭矩;S30、计算左轮转向助力分配扭矩和右轮转向助力分配扭矩;S40、根据步骤S20和S30中计算得到的左轮分配扭矩和右轮分配扭矩,以及左轮转向助力分配扭矩和右轮转向助力分配扭矩计算各个车轮的输出扭矩,并进行最大扭矩限制。在本发明中,通过轴间扭矩分配,获得良好的路面附着力,提高车辆的动力性;低速行驶时,通过控制左右驱动轮不同的扭矩,缩小在泊车入库等低速行驶情况下的转弯半径;高速

基于轮毂电机的纯电动汽车驱动防滑控制系统及方法.pdf
本发明提供一种基于轮毂电机的纯电动汽车驱动防滑控制方法,获取左前轮、右前轮、左后轮和右后轮的轮速,判断左前轮、右前轮的轮速差值是否小于或等于150r/min,是则取左前轮轮速w1作为前轮目标转速,否则取较小者为前轮目标转速;同理算出后轮目标转速M_Speed_R;二者比较得到整车的目标转速;分别将4个车轮的轮速与整车的目标转速对比,当判断该车轮有飞转的趋势,则降低发送给该车轮的轮毂电机控制器的力矩命令;当4个车轮的轮速均在合理范围内,则发送给各个轮毂电机控制器的力矩命令恢复为由驾驶员意图决定其大小的模式,
控制扭矩矢量机构的方法和扭矩矢量系统.pdf
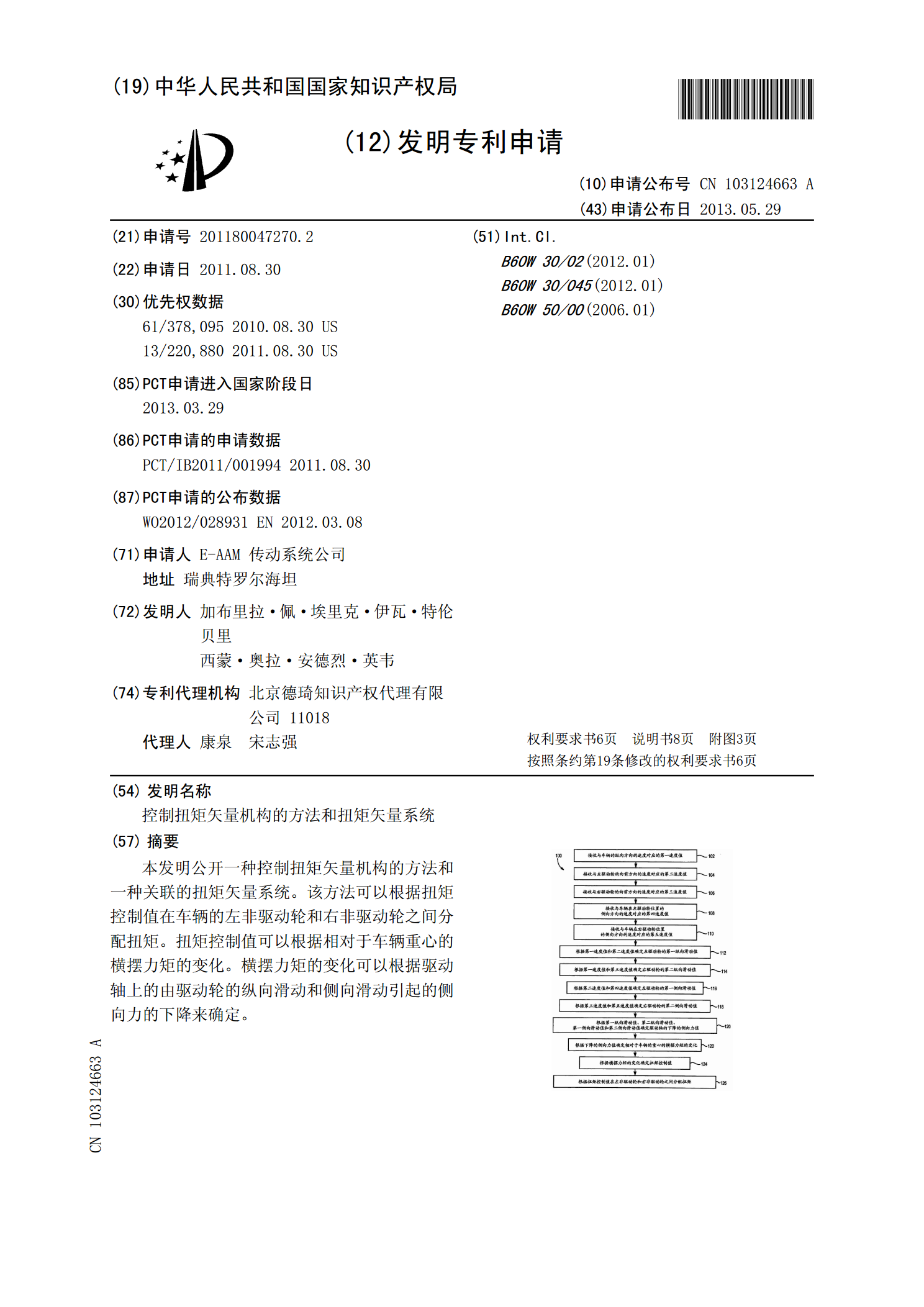
本发明公开一种控制扭矩矢量机构的方法和一种关联的扭矩矢量系统。该方法可以根据扭矩控制值在车辆的左非驱动轮和右非驱动轮之间分配扭矩。扭矩控制值可以根据相对于车辆重心的横摆力矩的变化。横摆力矩的变化可以根据驱动轴上的由驱动轮的纵向滑动和侧向滑动引起的侧向力的下降来确定。
四驱轮毂驱动纯电动汽车动力总成温度集成调控系统.pdf
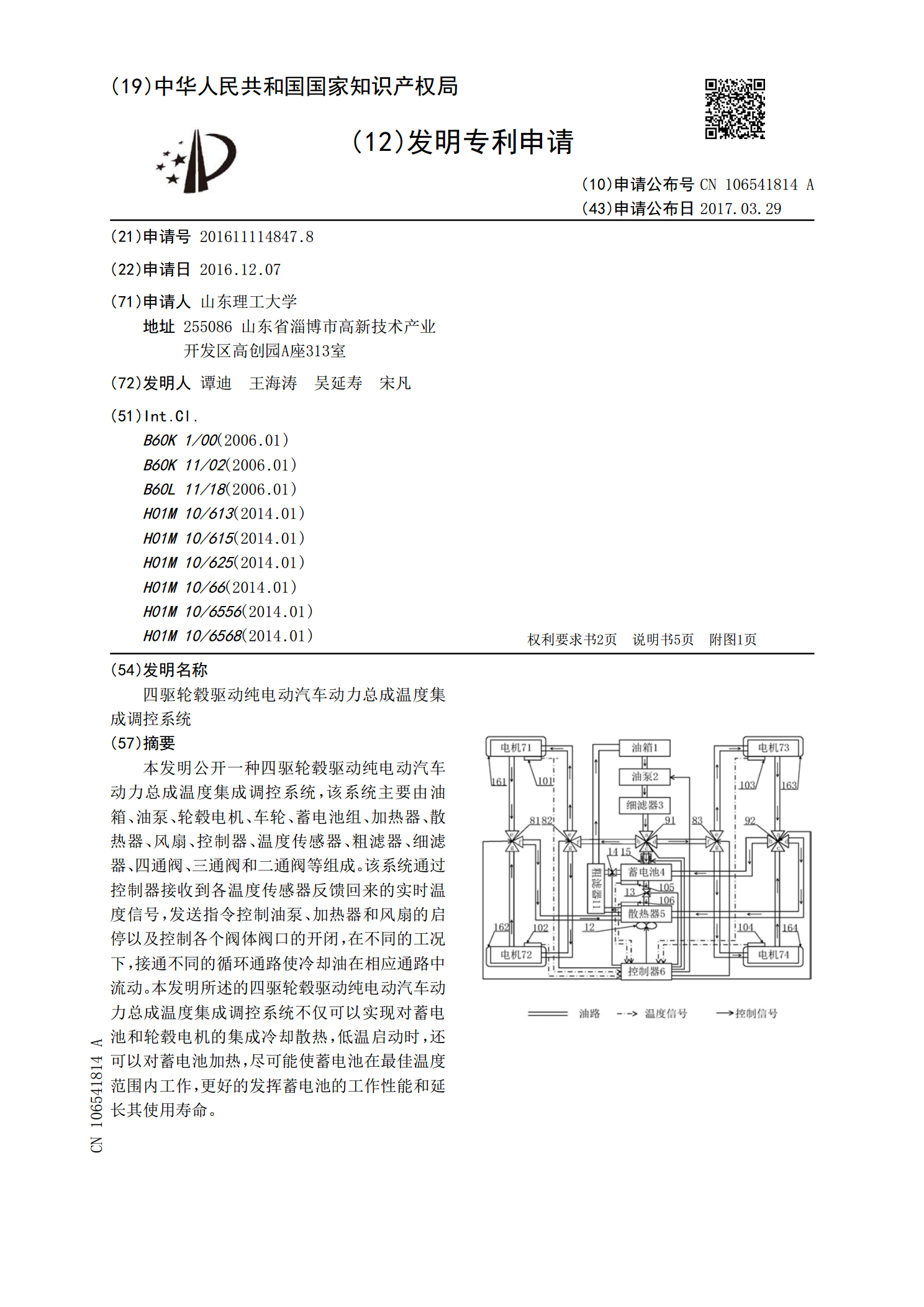
本发明公开一种四驱轮毂驱动纯电动汽车动力总成温度集成调控系统,该系统主要由油箱、油泵、轮毂电机、车轮、蓄电池组、加热器、散热器、风扇、控制器、温度传感器、粗滤器、细滤器、四通阀、三通阀和二通阀等组成。该系统通过控制器接收到各温度传感器反馈回来的实时温度信号,发送指令控制油泵、加热器和风扇的启停以及控制各个阀体阀口的开闭,在不同的工况下,接通不同的循环通路使冷却油在相应通路中流动。本发明所述的四驱轮毂驱动纯电动汽车动力总成温度集成调控系统不仅可以实现对蓄电池和轮毂电机的集成冷却散热,低温启动时,还可以对蓄电