
四驱EV电动车扭矩矢量控制方法.pdf

闪闪****魔王


1/8
2/8

3/8
4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

四驱EV电动车扭矩矢量控制方法.pdf
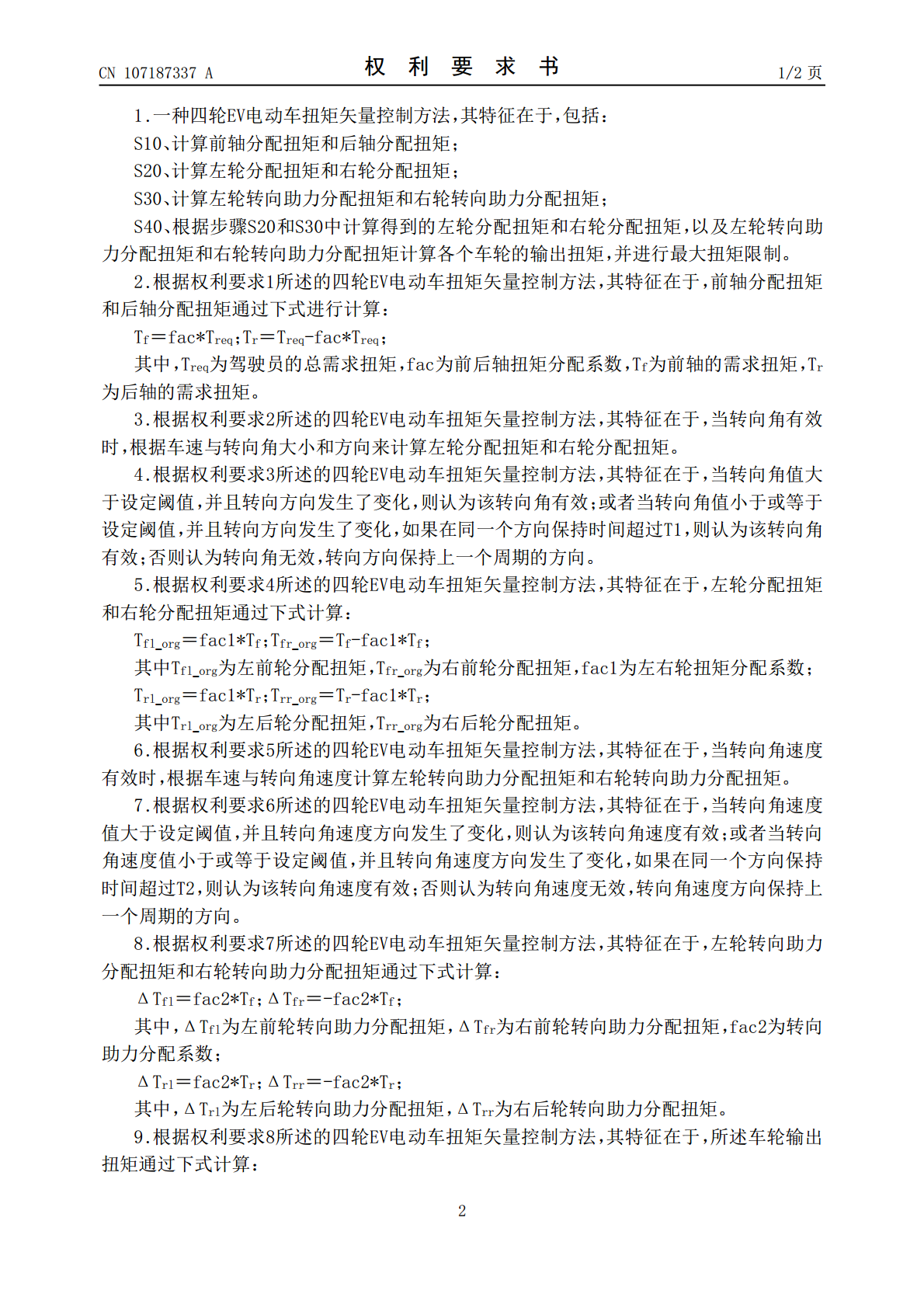
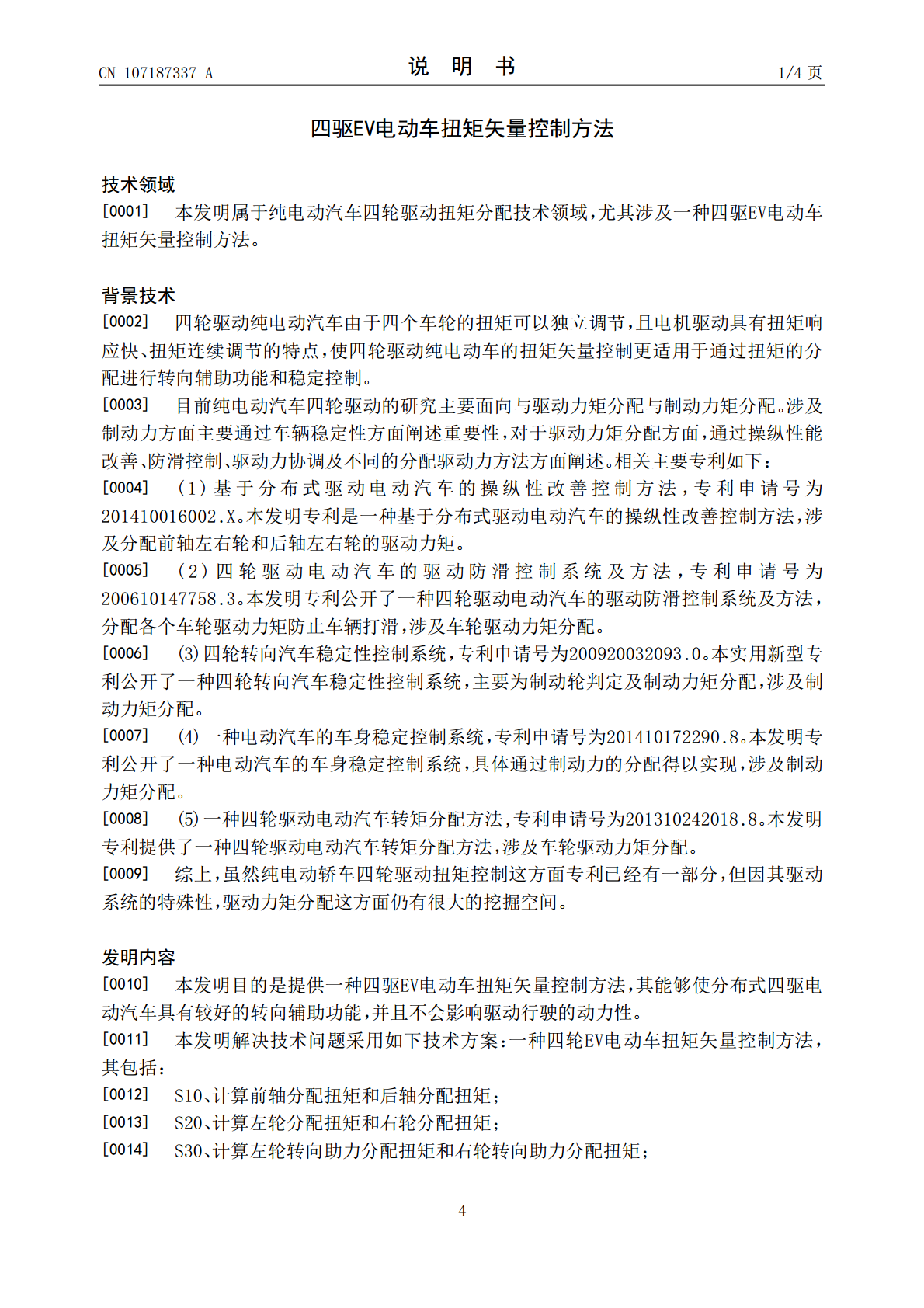
本发明公开了一种四轮EV电动车扭矩矢量控制方法,其包括:S10、计算前轴分配扭矩和后轴分配扭矩;S20、计算左轮分配扭矩和右轮分配扭矩;S30、计算左轮转向助力分配扭矩和右轮转向助力分配扭矩;S40、根据步骤S20和S30中计算得到的左轮分配扭矩和右轮分配扭矩,以及左轮转向助力分配扭矩和右轮转向助力分配扭矩计算各个车轮的输出扭矩,并进行最大扭矩限制。在本发明中,通过轴间扭矩分配,获得良好的路面附着力,提高车辆的动力性;低速行驶时,通过控制左右驱动轮不同的扭矩,缩小在泊车入库等低速行驶情况下的转弯半径;高速
轮毂四驱纯电动汽车扭矩矢量控制系统及控制方法.pdf
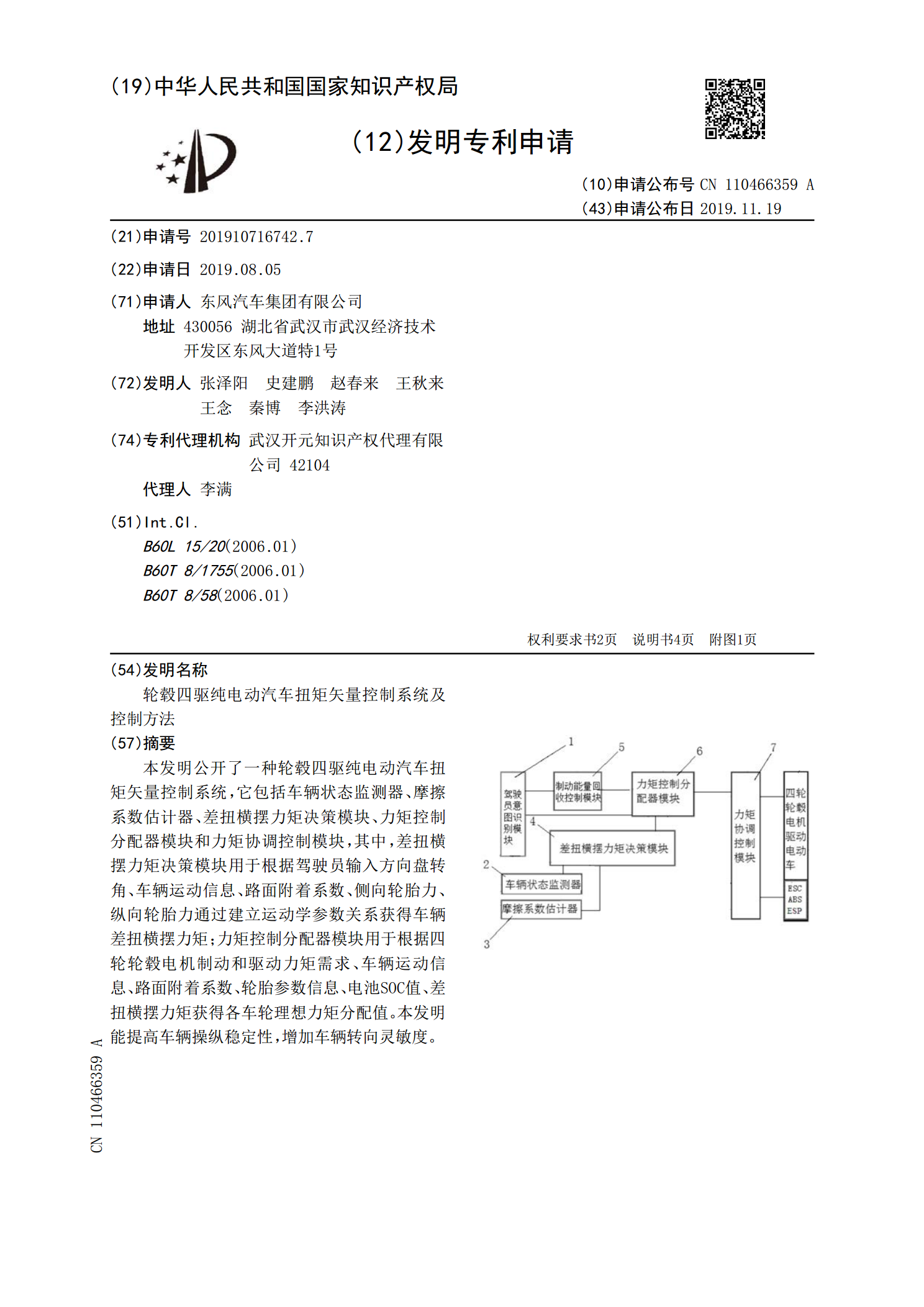
本发明公开了一种轮毂四驱纯电动汽车扭矩矢量控制系统,它包括车辆状态监测器、摩擦系数估计器、差扭横摆力矩决策模块、力矩控制分配器模块和力矩协调控制模块,其中,差扭横摆力矩决策模块用于根据驾驶员输入方向盘转角、车辆运动信息、路面附着系数、侧向轮胎力、纵向轮胎力通过建立运动学参数关系获得车辆差扭横摆力矩;力矩控制分配器模块用于根据四轮轮毂电机制动和驱动力矩需求、车辆运动信息、路面附着系数、轮胎参数信息、电池SOC值、差扭横摆力矩获得各车轮理想力矩分配值。本发明能提高车辆操纵稳定性,增加车辆转向灵敏度。
控制扭矩矢量机构的方法和扭矩矢量系统.pdf
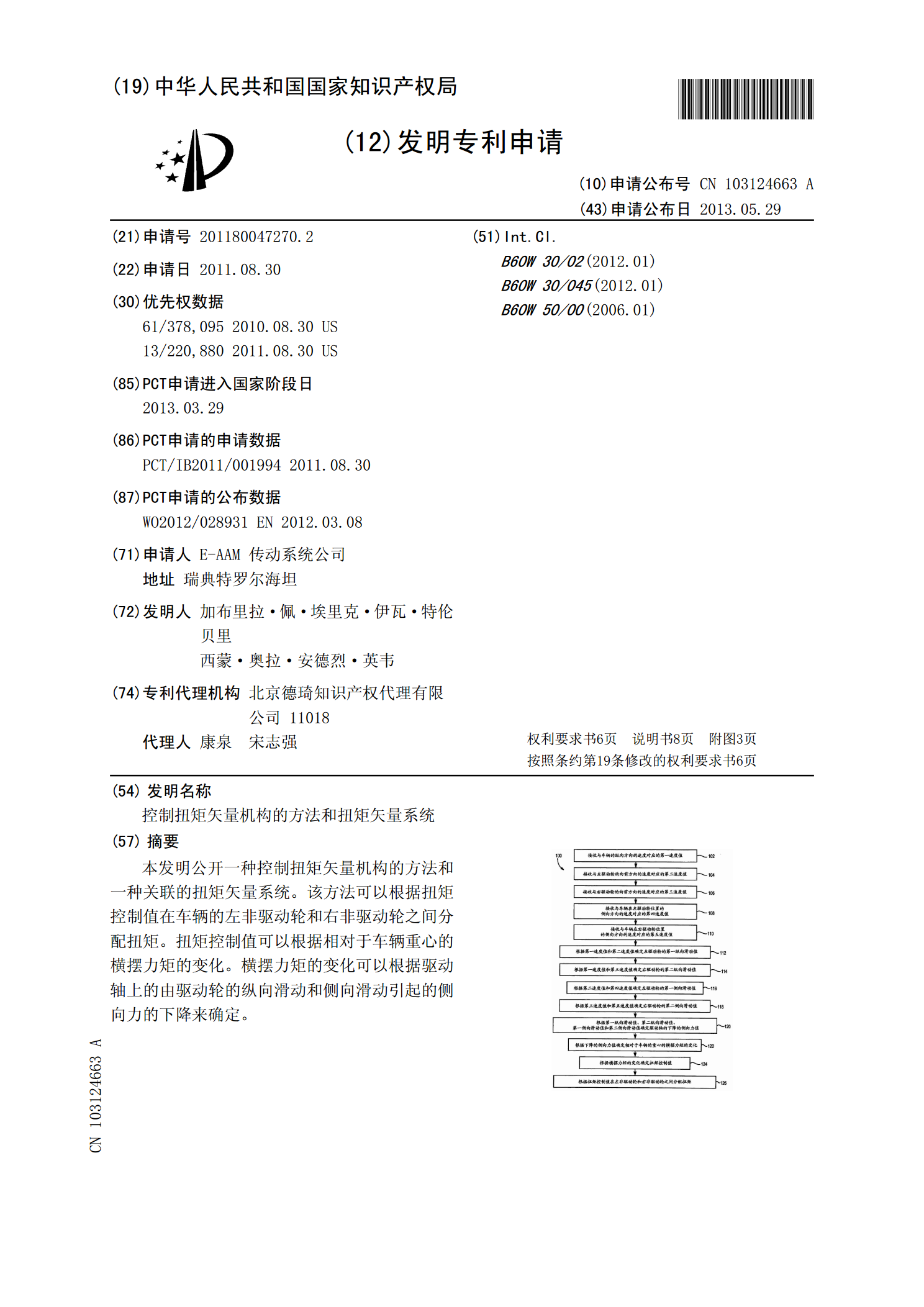
本发明公开一种控制扭矩矢量机构的方法和一种关联的扭矩矢量系统。该方法可以根据扭矩控制值在车辆的左非驱动轮和右非驱动轮之间分配扭矩。扭矩控制值可以根据相对于车辆重心的横摆力矩的变化。横摆力矩的变化可以根据驱动轴上的由驱动轮的纵向滑动和侧向滑动引起的侧向力的下降来确定。
分布式四驱电动车的扭矩分配控制方法、系统和车辆.pdf
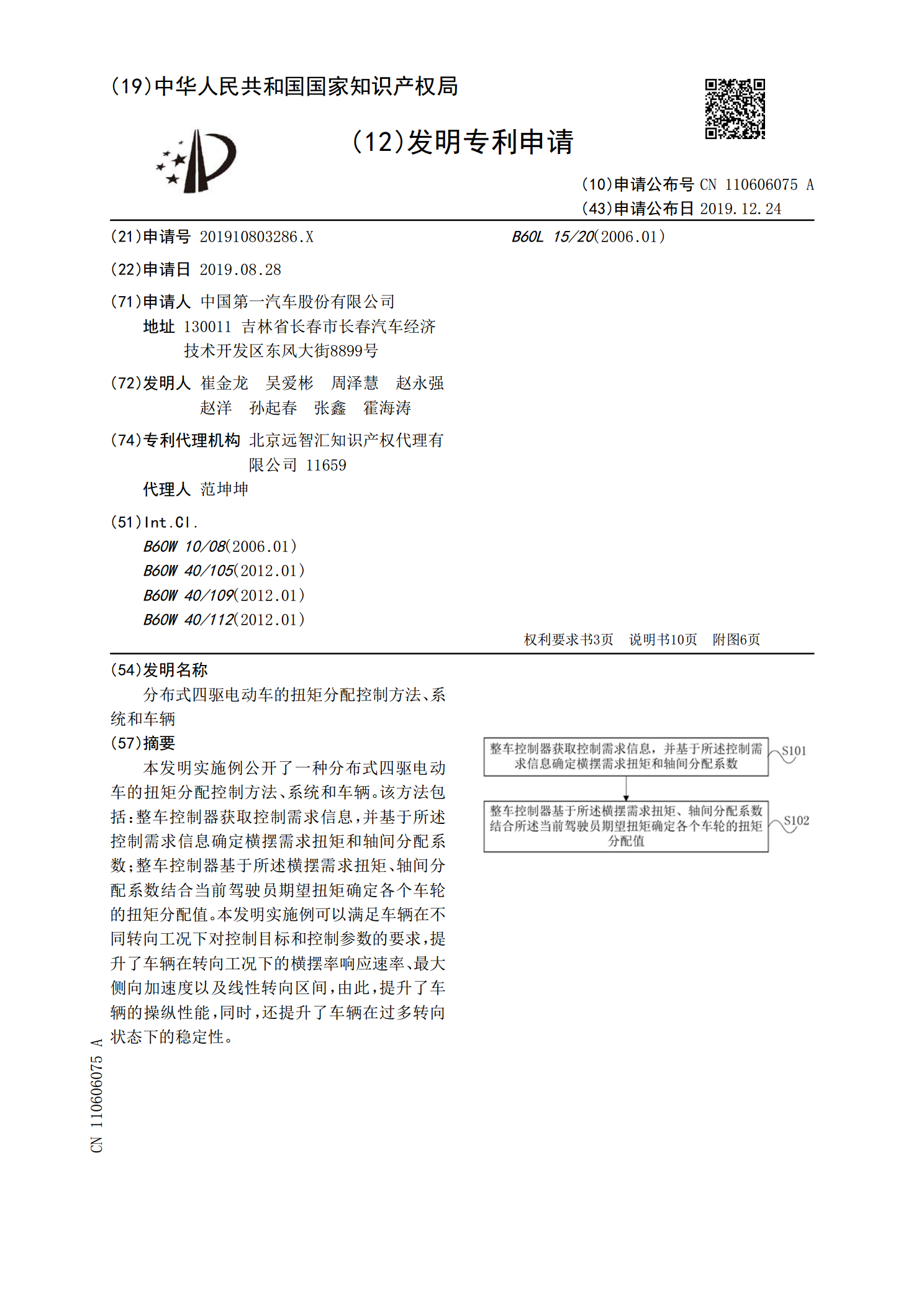
本发明实施例公开了一种分布式四驱电动车的扭矩分配控制方法、系统和车辆。该方法包括:整车控制器获取控制需求信息,并基于所述控制需求信息确定横摆需求扭矩和轴间分配系数;整车控制器基于所述横摆需求扭矩、轴间分配系数结合当前驾驶员期望扭矩确定各个车轮的扭矩分配值。本发明实施例可以满足车辆在不同转向工况下对控制目标和控制参数的要求,提升了车辆在转向工况下的横摆率响应速率、最大侧向加速度以及线性转向区间,由此,提升了车辆的操纵性能,同时,还提升了车辆在过多转向状态下的稳定性。

电动四驱汽车的电机扭矩控制方法及装置.pdf
本申请涉及电动汽车电驱动系统技术领域,特别涉及一种电动四驱汽车的电机扭矩控制方法及装置,其中,方法包括:在任一轴的电驱差速器进入主动保护模式时,获取任一轴的实际扭矩和当前需求扭矩之间的差值;根据差值和初始扭矩需求值叠加,得到除任一轴之外的其余轴的最终需求扭矩;在其余轴的电机差速器未进入主动保护模式时,控制其余轴的电机根据最终需求扭矩输出扭矩。本申请实施例可以在任一轴的电驱差速器进入主动保护模式时,获取其余轴的最终需求扭矩,并且在其余轴的电机差速器未进入主动保护模式时,控制其余轴的电机根据最终需求扭矩输出扭