
控制扭矩矢量机构的方法和扭矩矢量系统.pdf

一只****呀9


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
控制扭矩矢量机构的方法和扭矩矢量系统.pdf
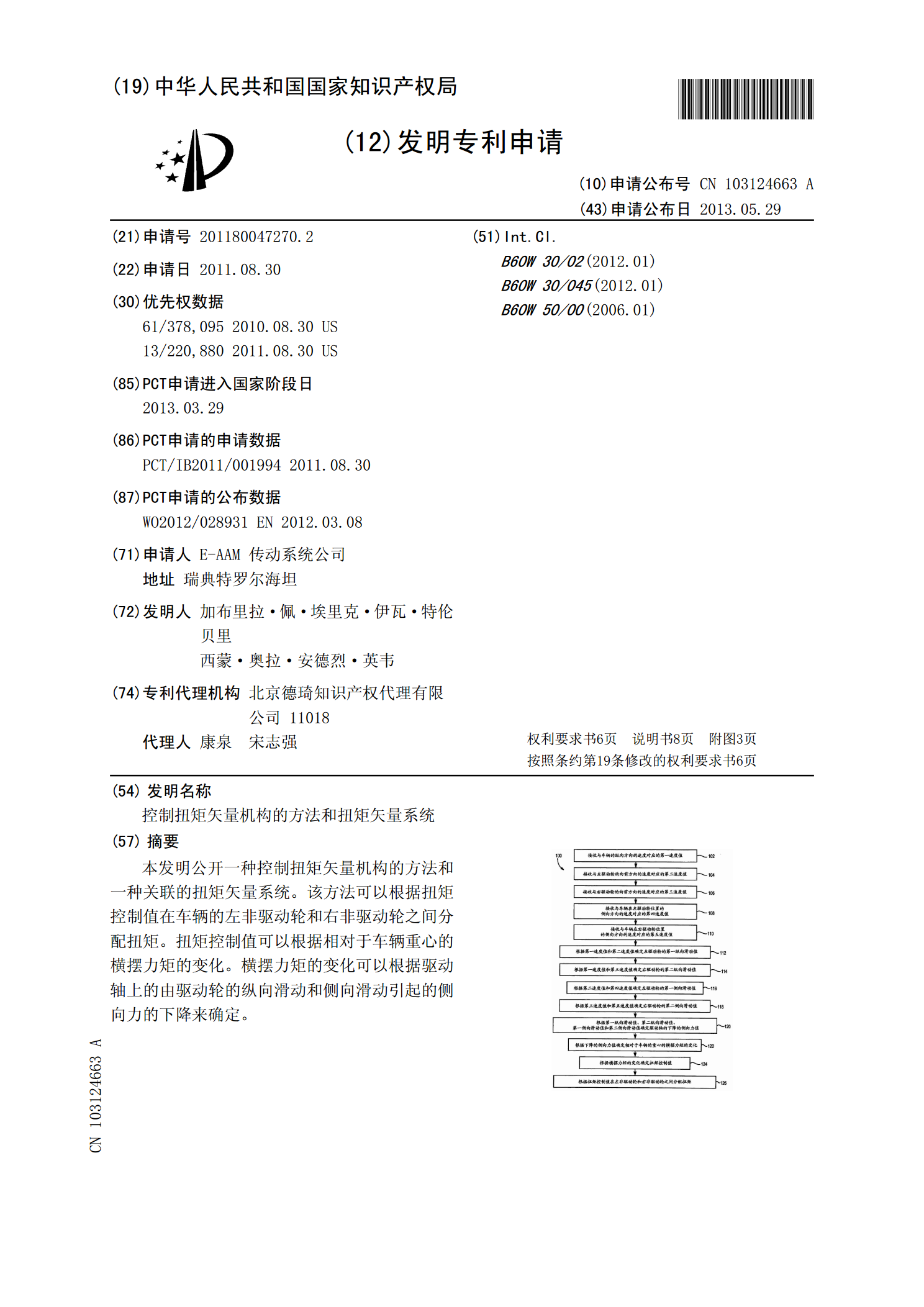
本发明公开一种控制扭矩矢量机构的方法和一种关联的扭矩矢量系统。该方法可以根据扭矩控制值在车辆的左非驱动轮和右非驱动轮之间分配扭矩。扭矩控制值可以根据相对于车辆重心的横摆力矩的变化。横摆力矩的变化可以根据驱动轴上的由驱动轮的纵向滑动和侧向滑动引起的侧向力的下降来确定。

用于扭矩矢量控制的方法和系统.pdf
本公开提供了“用于扭矩矢量控制的方法和系统”。提供了用于在可能发生车轮打滑的操作条件期间操作车辆的方法和系统。在一个示例中,调整扭矩矢量控制电机扭矩输出以将推进扭矩从一个车轮引导到不同的车轮。另外,响应于驾驶员需求车轮扭矩而调整所述推进扭矩。

用于操作扭矩矢量控制电机的方法和系统.pdf
本公开提供“用于操作扭矩矢量控制电机的方法和系统”。提供了用于操作包括扭矩矢量控制电机的车辆的方法和系统。在一个示例中,在扭矩矢量控制电机被激活时调整所述扭矩矢量控制电机的扭矩输出以减少传动系扭矩扰动。响应于车轮速度和所述扭矩矢量控制电机的速度之间的速度差调整所述扭矩输出。

扭矩矢量控制装置.pdf
本发明提供一种扭矩矢量控制装置,即便是车辆正在前进的状态,扭矩矢量控制马达也会旋转,能够防止扭矩矢量控制马达的定子的劣化。扭矩矢量控制装置具有扭矩矢量控制马达(2)、连结有左驱动轮(21L)的第一太阳齿轮(S1)、第一行星齿轮(P1)、第二太阳齿轮(S2)、与第一行星齿轮(P1)同轴且形成为一体的多个第二行星齿轮(P2)、连结扭矩矢量控制马达(2)并轴支承多个第一行星齿轮(P1)和多个第二行星齿轮(P2)的共用行星架(Cc)、被输入驱动扭矩的差速器齿圈(Rd)、连结有左驱动轮(21L)的差速器太阳齿轮(S

扭矩矢量控制装置.pdf
本发明提供能够抑制左右的驱动轮意外地进行相对旋转的扭矩矢量控制装置。扭矩矢量控制装置(1)具备:驱动用马达(2);差动机构(4),其由两个行星齿轮机构(31、32)构成;差动用马达(5),其将扭矩向一方的行星齿轮机构的第一反作用力要素(34)和另一方的行星齿轮机构的第二反作用力要素(38)的任一方传递;反转机构(41),其使作用于第一反作用力要素的扭矩反转、且将该扭矩向第二反作用力要素传递;以及旋转轴(30),其将各行星齿轮机构的输入要素彼此连结,其中,具备:第一旋转部件,其与差动用马达的输出轴连结;以及