
轮毂电机驱动电动汽车的分时四轮转向系统及其控制方法.pdf

是你****平呀

1/10
2/10
3/10
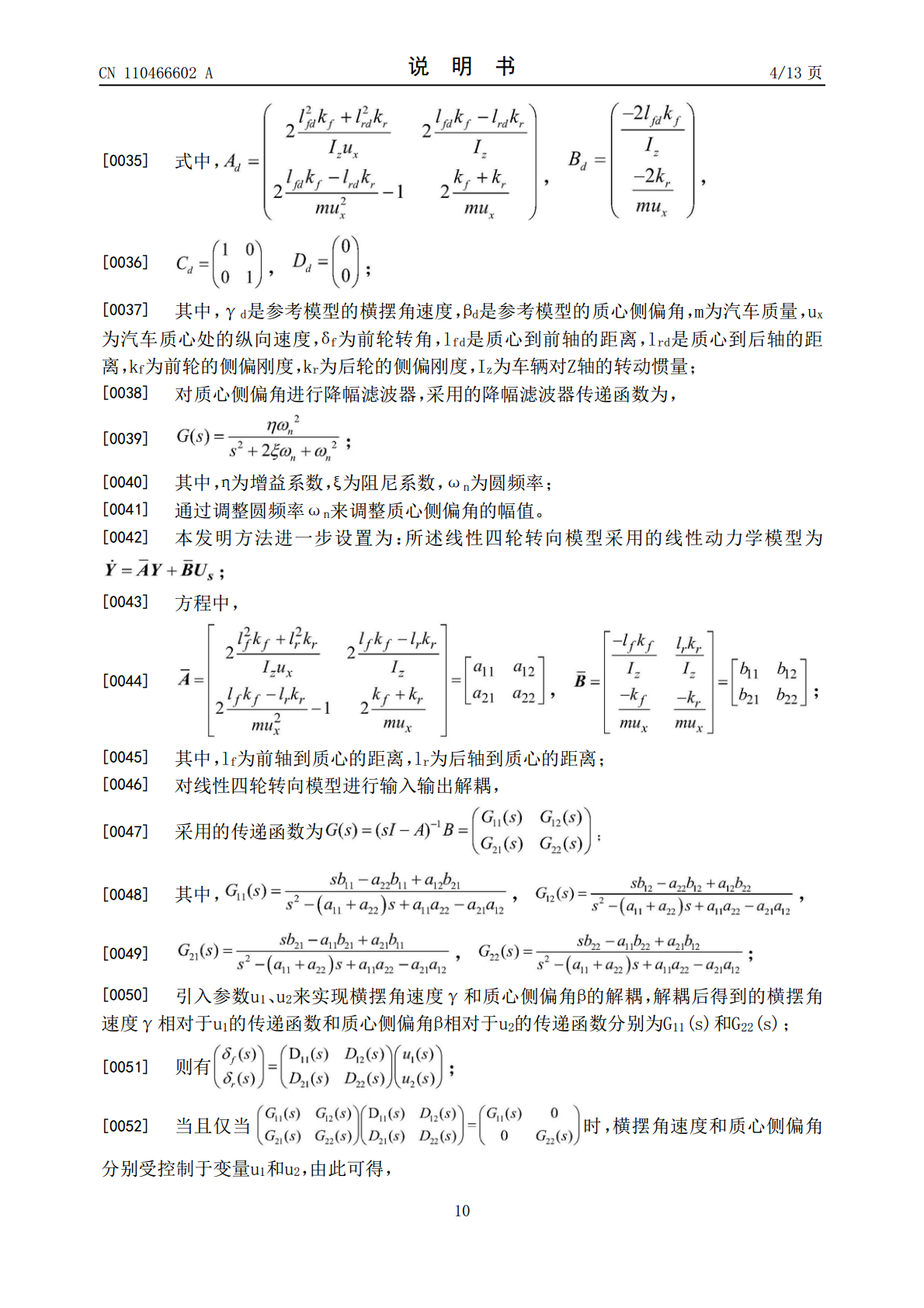
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轮毂电机驱动电动汽车的分时四轮转向系统及其控制方法.pdf
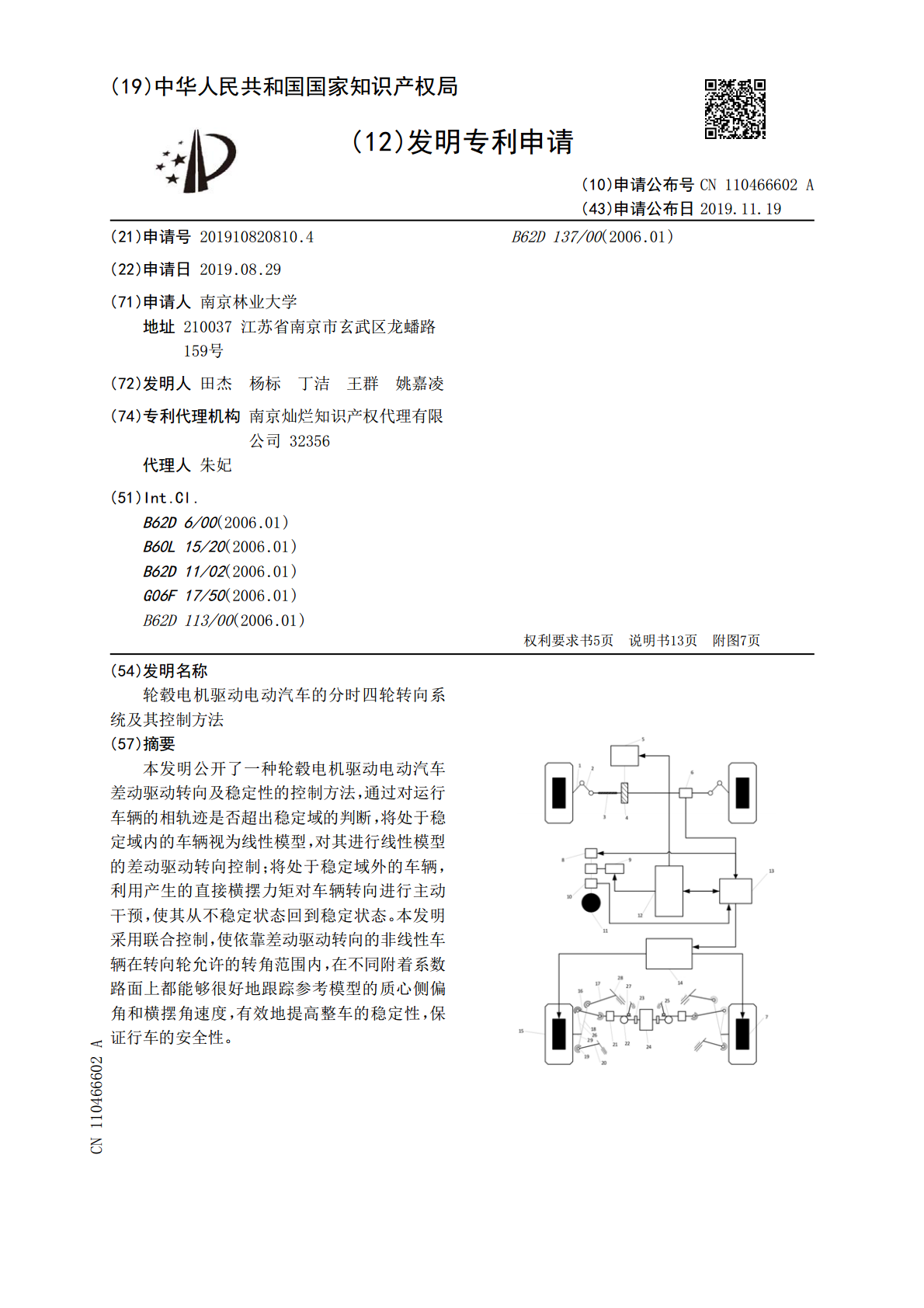
本发明公开了一种轮毂电机驱动电动汽车差动驱动转向及稳定性的控制方法,通过对运行车辆的相轨迹是否超出稳定域的判断,将处于稳定域内的车辆视为线性模型,对其进行线性模型的差动驱动转向控制;将处于稳定域外的车辆,利用产生的直接横摆力矩对车辆转向进行主动干预,使其从不稳定状态回到稳定状态。本发明采用联合控制,使依靠差动驱动转向的非线性车辆在转向轮允许的转角范围内,在不同附着系数路面上都能够很好地跟踪参考模型的质心侧偏角和横摆角速度,有效地提高整车的稳定性,保证行车的安全性。
轮毂电机驱动电动汽车的差速转向系统及其电动汽车.pdf
本发明公开了一种轮毂电机驱动电动汽车的差速转向系统,该系统的车架通过下摆臂分别与四个车轮内轮毂电机上的转向节连接,所述轮毂电机的转子与车轮的轮毂固定连接,所述轮毂电机的内部安装有鼓式制动器;所述车架的前后方分别设置有独立悬挂,所述上摆臂和下摆臂两端与所述车架两侧的车轮的转向节连接;所述车架前方设置转向齿条,所述转向齿条的两端通过转向横拉杆与所述车架前方两侧的车轮的转向节连接;所述转向齿条的一侧设置回正机构的回位弹簧;还公开了一种电动汽车,通过本发明能够调整车轮转速以满足行驶时各车轮与地面间保持纯滚动状态,
轮毂电机驱动电动汽车差动驱动转向及稳定性的控制方法.pdf
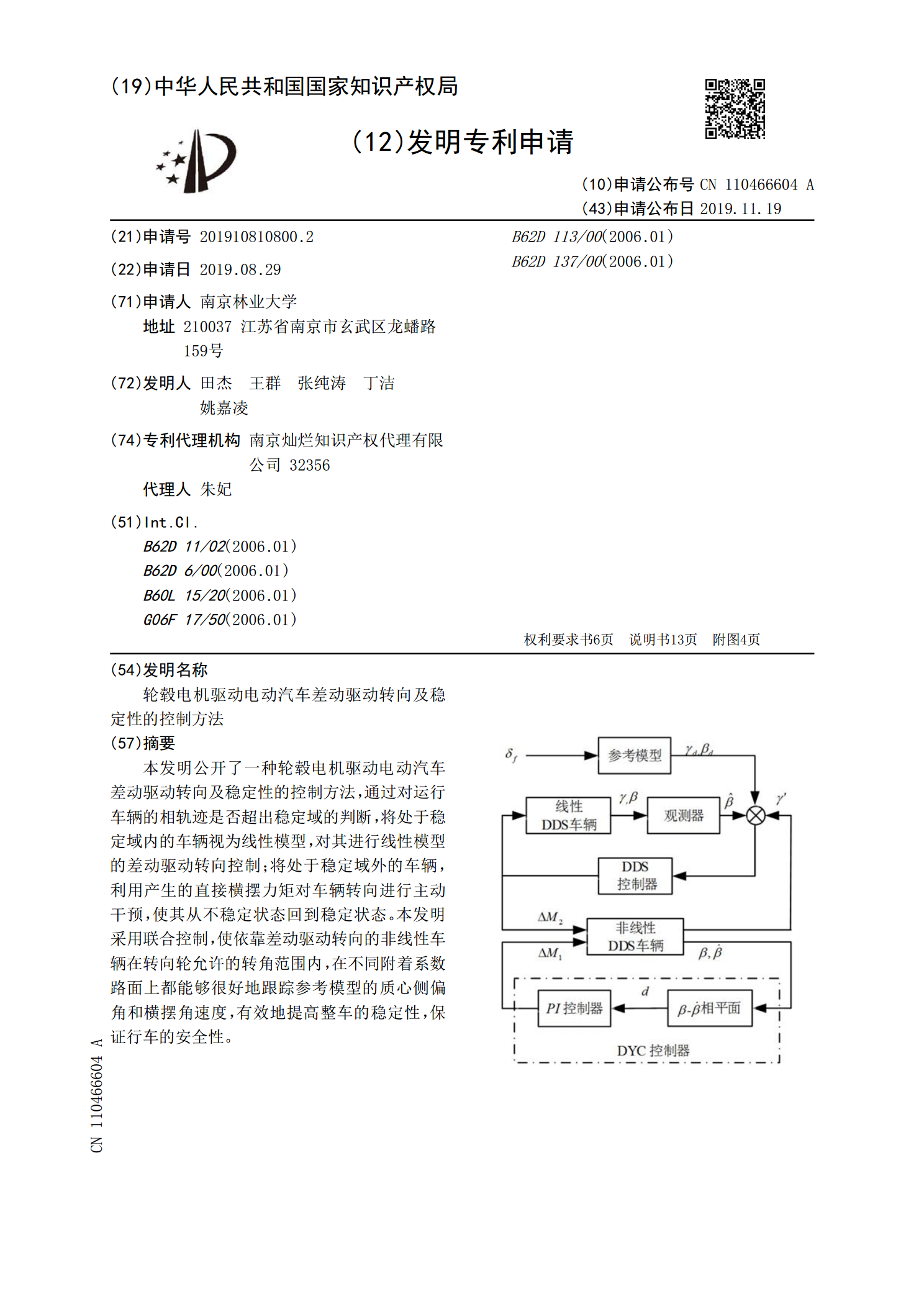
本发明公开了一种轮毂电机驱动电动汽车差动驱动转向及稳定性的控制方法,通过对运行车辆的相轨迹是否超出稳定域的判断,将处于稳定域内的车辆视为线性模型,对其进行线性模型的差动驱动转向控制;将处于稳定域外的车辆,利用产生的直接横摆力矩对车辆转向进行主动干预,使其从不稳定状态回到稳定状态。本发明采用联合控制,使依靠差动驱动转向的非线性车辆在转向轮允许的转角范围内,在不同附着系数路面上都能够很好地跟踪参考模型的质心侧偏角和横摆角速度,有效地提高整车的稳定性,保证行车的安全性。

双轮毂电机驱动系统自适应平衡转向控制方法.pdf
本发明提出了一种双轮毂电机驱动系统自适应平衡转向控制方法,其基本控制系统包括电子差速专用处理器、左轮毂刹车驱动电路、左轮毂加速驱动电路、左轮毂电机控制器、右轮毂刹车驱动电路、右轮毂加速驱动电路、右轮毂电机控制器、左轮转速传感器、右轮转速传感器、互锁开关电路、车身平衡度预判器、前端加速度传感器、尾端加速度传感器、转弯传感器、加速踏板和通信接口,该方法利用转弯传感信息、车身倾斜度信息、车辆速度和车辆速度背离率建立了一种评价车辆转弯安全度的方法,在转向控制领域引入了电子刹车处理手段,使得双轮毂电机驱动系统能够更

电动汽车多电机驱动系统及其控制方法.pdf
本发明涉及一种电动汽车多电机驱动系统及其控制方法。多电机驱动系统包括控制单元、通信单元、驱动单元和电机及采集电机运行状态的信号传感器,控制单元只有一个,驱动单元至少有两个,控制单元经通信单元和驱动单元相连,驱动单元和电机一一对应相连,信号传感器的输出端和控制单元相连。控制方法为:控制单元接收电动汽车驾驶员操作指令,再发出控制信号通过通信单元传输给驱动单元,驱动单元驱动电机运行,信号传感器实时采集电机运转状态并回传信息给控制单元,实现电机的实时监控。本发明实现一个控制单元对多个电机的控制,方便实现电动汽车中