
轮毂电机驱动电动汽车差动驱动转向及稳定性的控制方法.pdf

努力****亚捷

1/10
2/10

3/10

4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轮毂电机驱动电动汽车差动驱动转向及稳定性的控制方法.pdf
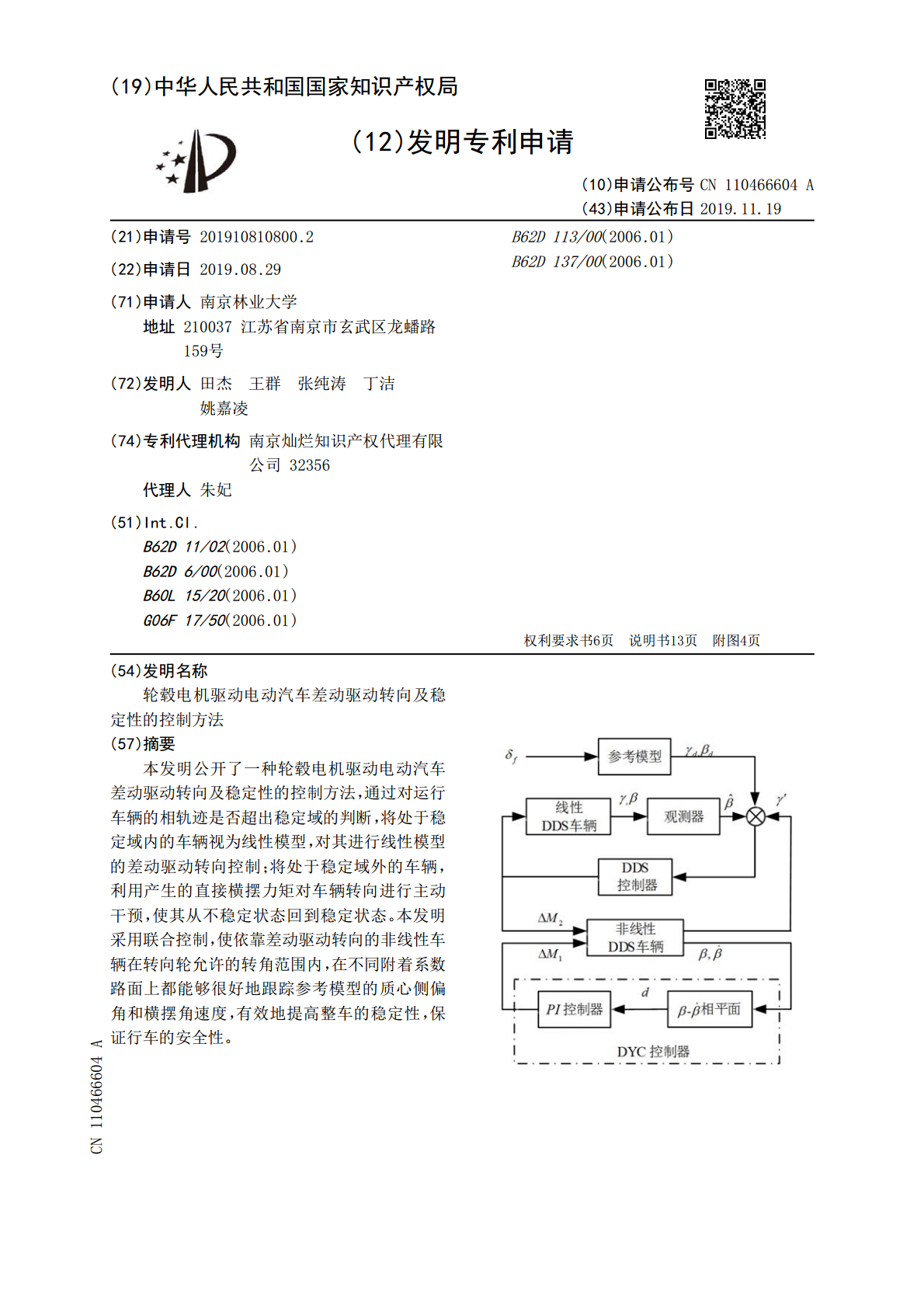
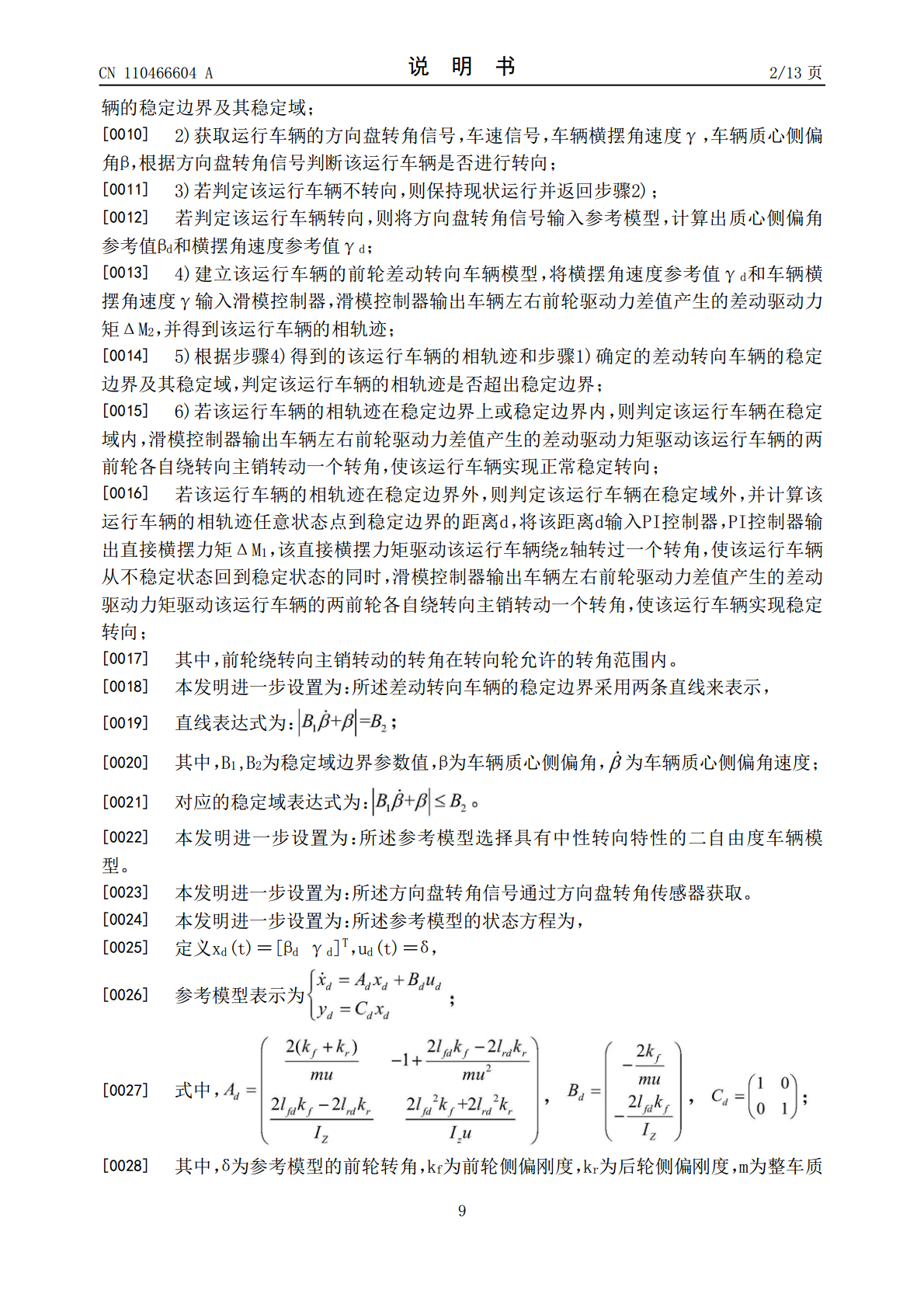
本发明公开了一种轮毂电机驱动电动汽车差动驱动转向及稳定性的控制方法,通过对运行车辆的相轨迹是否超出稳定域的判断,将处于稳定域内的车辆视为线性模型,对其进行线性模型的差动驱动转向控制;将处于稳定域外的车辆,利用产生的直接横摆力矩对车辆转向进行主动干预,使其从不稳定状态回到稳定状态。本发明采用联合控制,使依靠差动驱动转向的非线性车辆在转向轮允许的转角范围内,在不同附着系数路面上都能够很好地跟踪参考模型的质心侧偏角和横摆角速度,有效地提高整车的稳定性,保证行车的安全性。

一种轮毂电机驱动电动汽车差动助力转向稳定性控制方法.pdf
本发明公开了一种轮毂电机驱动电动汽车差动助力转向稳定性控制方法,包括以下步骤:S1、提取横摆角速度偏差和实际质心侧偏角组成特征状态;S2、基于可拓理论,计算出不同集合状态下的可拓协调控制的关联函数;S3、根据上述关联函数确定关联函数在不同集合状态下对应的差动助力矩权重系数以及横摆力矩权重系数;S4、建立差动助力转向控制器并结合差动助力矩权重系数得到差动助力矩;S5、建立横摆力矩控制器并结合横摆力矩权重系数得到横摆力矩;S6、根据实际车速信息并通过PID控制获取达到目标车速所需的总驱动转矩;S7、对差动助力
轮毂电机驱动汽车差动助力转向与稳定性协调控制.pdf
轮毂电机驱动汽车差动助力转向与稳定性协调控制--轮毂电机驱动汽车差动助力转向与稳定性协调控制驱动汽车;差动助力转向;稳定性控制【Abstract】Forthehubmotordrivecar,thispaperestablishesthewholevehiclemodelandthedifferentialpowersteeringsystemmodel.Accordingtothehubmotor,thecarcanindependentlycontroltheoutputtorqueoftheleft

轮毂电机驱动车辆线控差动转向的研究.docx
轮毂电机驱动车辆线控差动转向的研究论文题目:轮毂电机驱动车辆线控差动转向的研究摘要:差动转向是指通过分配驱动轮的不同转速实现转向动作。传统的车辆转向方式主要依赖于转向轮的角度调节,但是这种方式存在一定的局限性。随着轮毂电机技术的发展,利用电机驱动车辆的差动转向方式成为了一种新的研究方向。本论文以轮毂电机驱动车辆线控差动转向为研究对象,对其原理、算法及实验结果进行分析和探讨。1.引言1.1研究背景1.2研究意义2.轮毂电机驱动车辆的差动转向原理2.1轮毂电机概述2.2差动转向原理2.3差动转向控制算法3.实

轮毂电机驱动电动汽车转向性能控制研究.docx
轮毂电机驱动电动汽车转向性能控制研究轮毂电机驱动电动汽车转向性能控制研究摘要:电动汽车作为新能源汽车的一种重要形式,具有环保、高效、低噪音等优势日益受到关注。而其转向性能对于行车安全和舒适性具有重要影响。本论文主要研究轮毂电机驱动电动汽车的转向性能控制策略,包括转向系统的结构设计、转向控制方法以及参数优化等。关键词:轮毂电机,电动汽车,转向性能,控制策略一、引言随着环境污染和能源危机等问题的日益突出,电动汽车作为一种清洁、高效的交通工具逐渐受到广泛关注。而电动汽车的转向性能直接关系到行车的安全和舒适性,因