
深海全回转推进装置.pdf

小长****6淑

1/9

2/9

3/9

4/9
5/9

6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
深海全回转推进装置.pdf
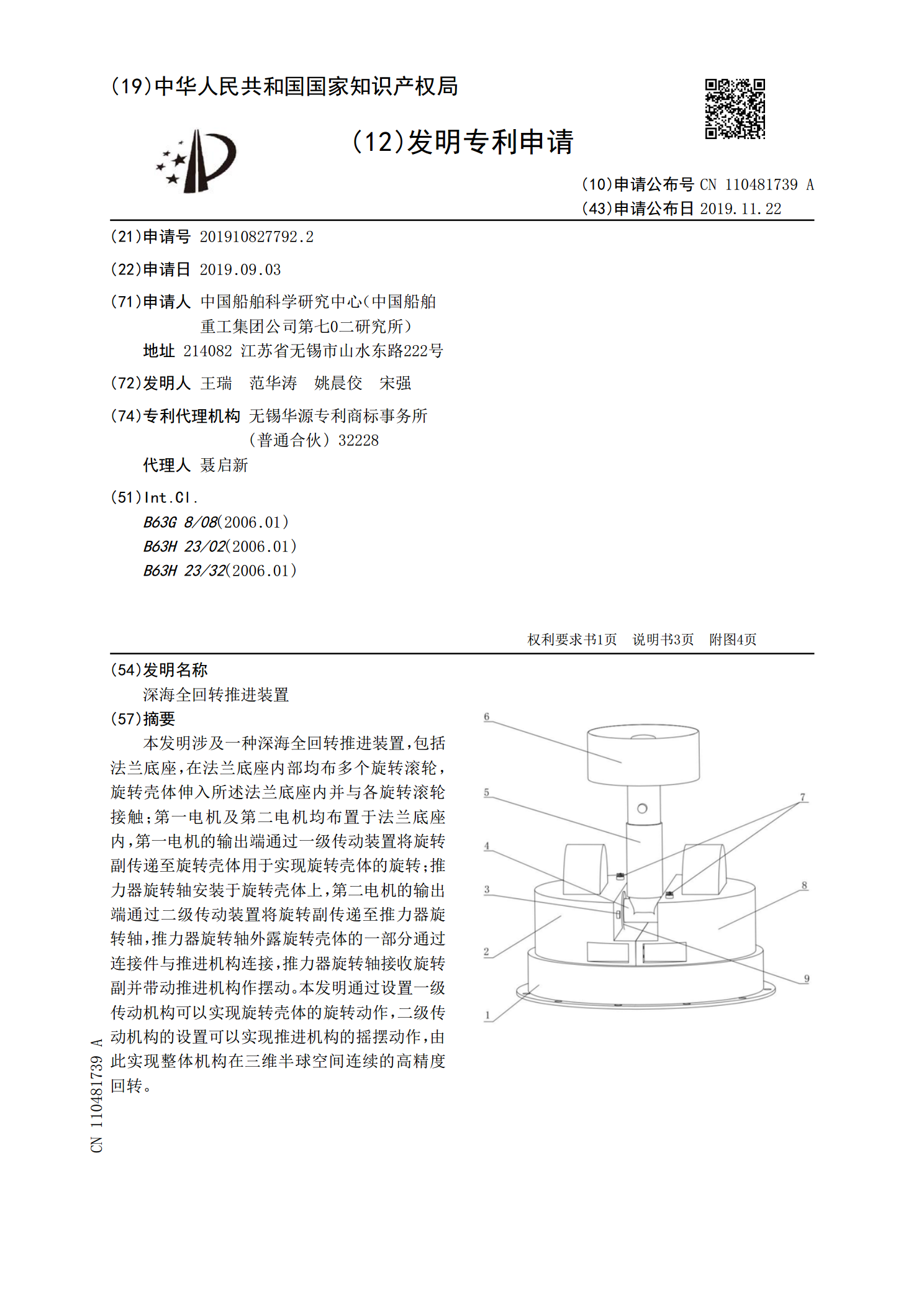
本发明涉及一种深海全回转推进装置,包括法兰底座,在法兰底座内部均布多个旋转滚轮,旋转壳体伸入所述法兰底座内并与各旋转滚轮接触;第一电机及第二电机均布置于法兰底座内,第一电机的输出端通过一级传动装置将旋转副传递至旋转壳体用于实现旋转壳体的旋转;推力器旋转轴安装于旋转壳体上,第二电机的输出端通过二级传动装置将旋转副传递至推力器旋转轴,推力器旋转轴外露旋转壳体的一部分通过连接件与推进机构连接,推力器旋转轴接收旋转副并带动推进机构作摆动。本发明通过设置一级传动机构可以实现旋转壳体的旋转动作,二级传动机构的设置可以

深海推进器的360°全回转装置.pdf
本发明涉及一种深海推进器的360°全回转装置,包括支撑座、驱动电机、第一级传动装置、第二级传动装置、角度反馈装置和回转传动装置,所述支撑座内部设置充油腔和水密腔;所述驱动电机依次连接第一级传动装置、第二级传动装置和角度反馈装置;第一级蜗杆和第二级蜗杆为双导程蜗杆。本发明可以实现360°全回转,且采用两级高精度双导程蜗轮蜗杆传动,能提供精确的角度定位。

船模全回转推进装置.pdf
本发明涉及一种船模全回转推进装置,由轴向传动机构及周向转动机构组成;轴向传动机构包括贯穿装置于安装基座内的上节内轴,上节内轴的一端与第一伺服电机连接,另一端伸出安装基座并连接下节内轴的一端,下节内轴的另一端通过锥齿轮与水平传动轴连接,水平转动轴上装置螺旋桨;周向转动机构包括周向传动轴,周向传动轴的外围与蜗轮及蜗杆连接,蜗杆与第二伺服电机的输出端连接;周向传动轴还通过盖板连接外轴的一端,外轴的另一端与装置于上述螺旋桨外围的壳体相配合。本发明结构紧凑、体积小巧,可同时实现螺旋桨轴向推进及周向360度转动,并且
一种全回转推进装置.pdf
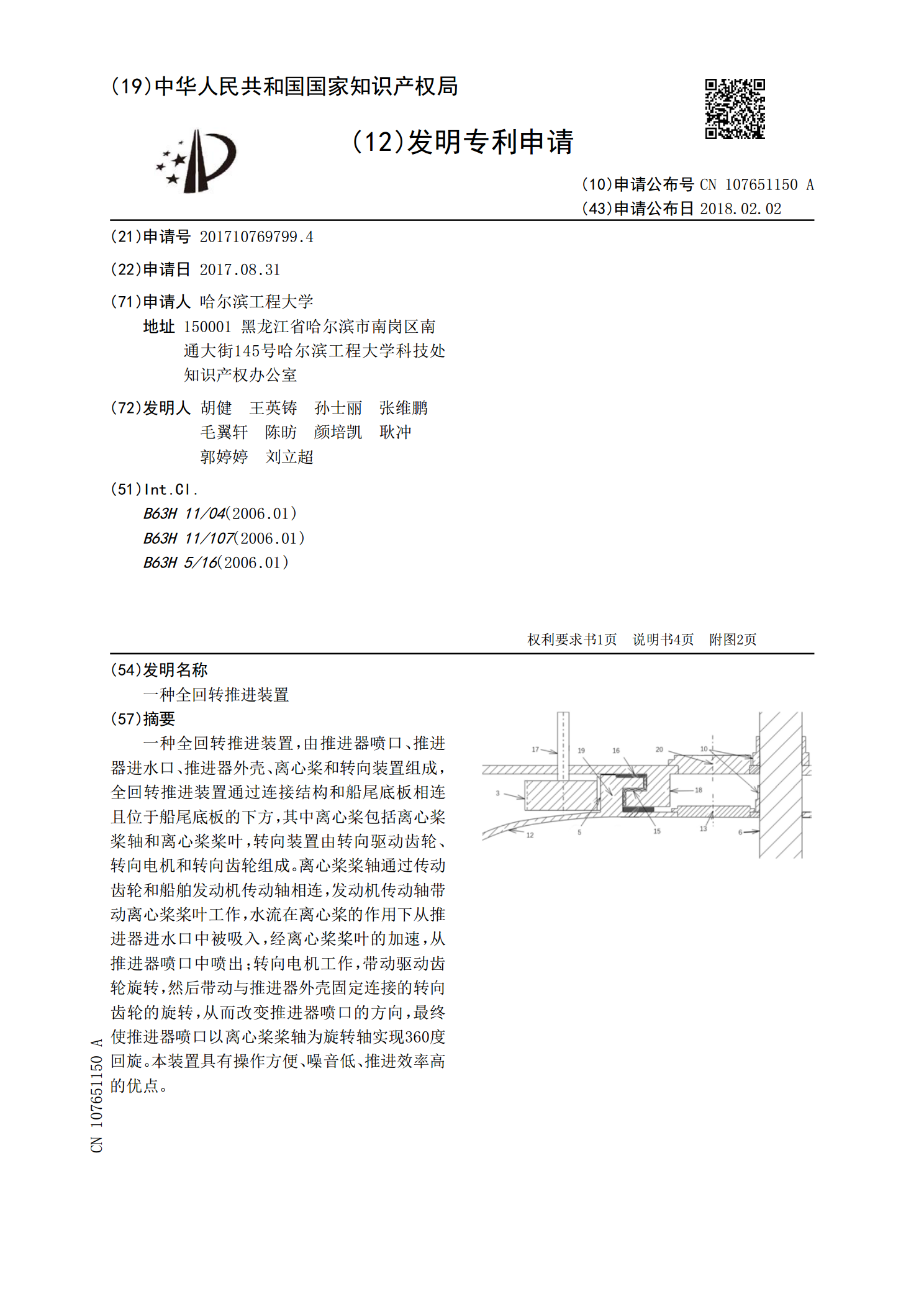
一种全回转推进装置,由推进器喷口、推进器进水口、推进器外壳、离心桨和转向装置组成,全回转推进装置通过连接结构和船尾底板相连且位于船尾底板的下方,其中离心桨包括离心桨桨轴和离心桨桨叶,转向装置由转向驱动齿轮、转向电机和转向齿轮组成。离心桨桨轴通过传动齿轮和船舶发动机传动轴相连,发动机传动轴带动离心桨桨叶工作,水流在离心桨的作用下从推进器进水口中被吸入,经离心桨桨叶的加速,从推进器喷口中喷出;转向电机工作,带动驱动齿轮旋转,然后带动与推进器外壳固定连接的转向齿轮的旋转,从而改变推进器喷口的方向,最终使推进器喷

360°全回转船舶对转桨推进装置.pdf
360°全回转船舶对转桨推进装置其核心为内河中小型船舶在螺旋桨低速时的对转桨技术,它是结合中国船舶现状的创新和发展。经过多条船舶长达10余年的测试和航行实践证明节能8~10%,航行安全,提高航速和推进效率10%左右。在系列产品基础上创新制订了对转桨理论图谱,填补了国内外空白。本发明采用直联式传动方式使上述节能指标再提高1~2%。机内安装液压离合器系统,工作可靠,噪音减少,功率范围扩大。采用密封件及弹性元件的井架式密封盖支架,使发动机及整机落舱(加上机内使用螺旋伞齿轮及环保润滑油)既解决噪声及环