
一种提高柔性外骨骼机器人髋关节伸展助力效率的装置.pdf

运升****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种提高柔性外骨骼机器人髋关节伸展助力效率的装置.pdf
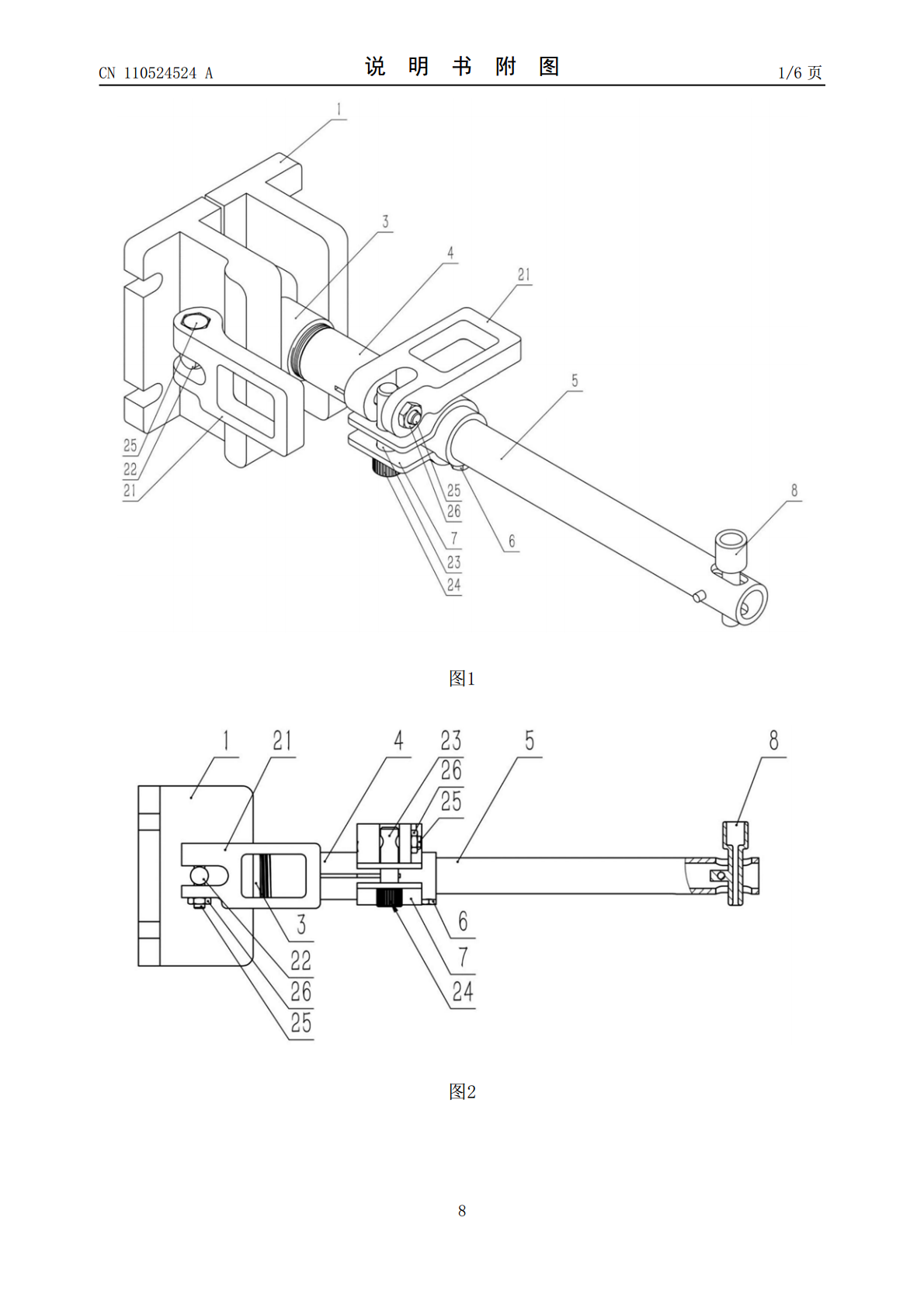
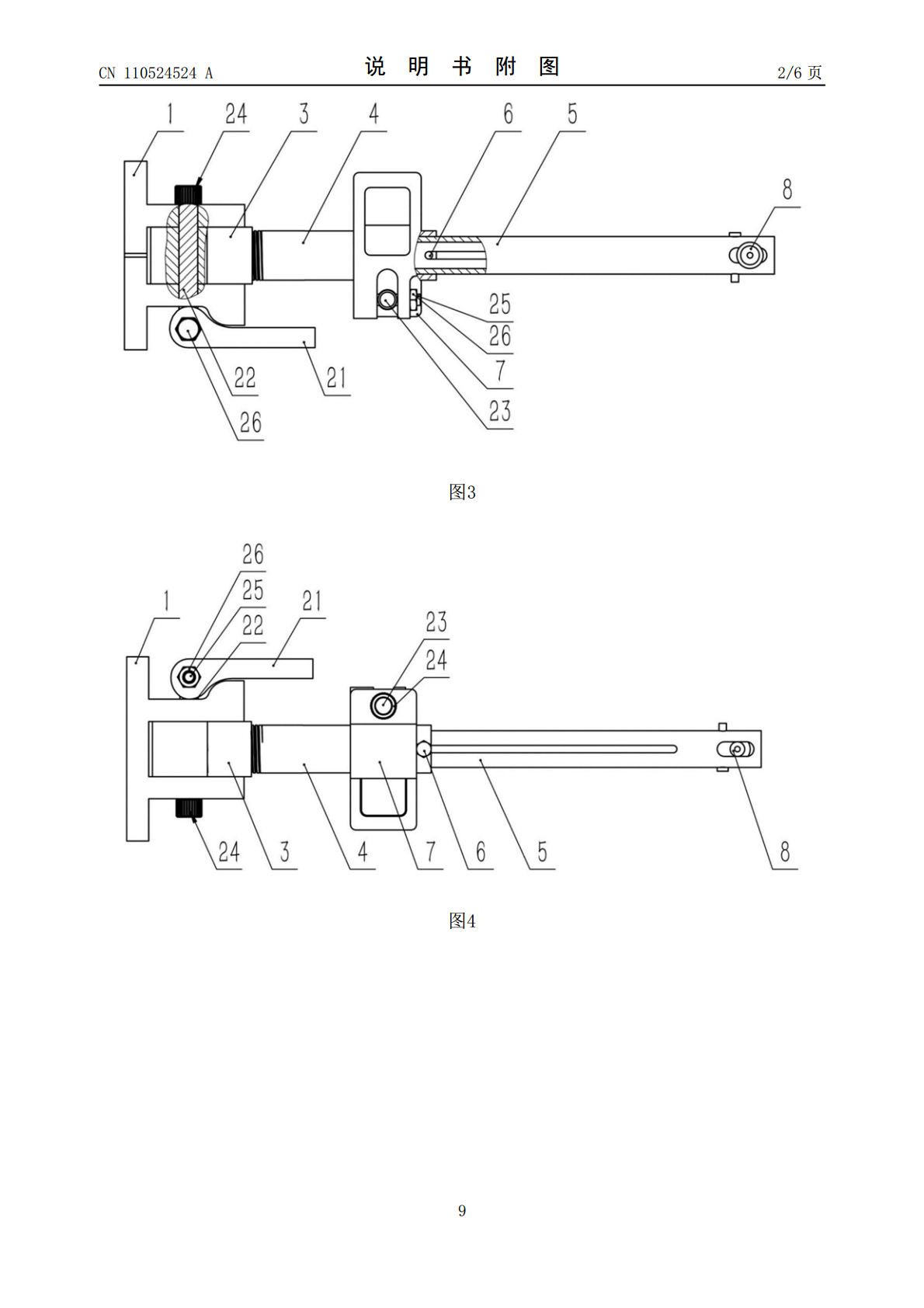
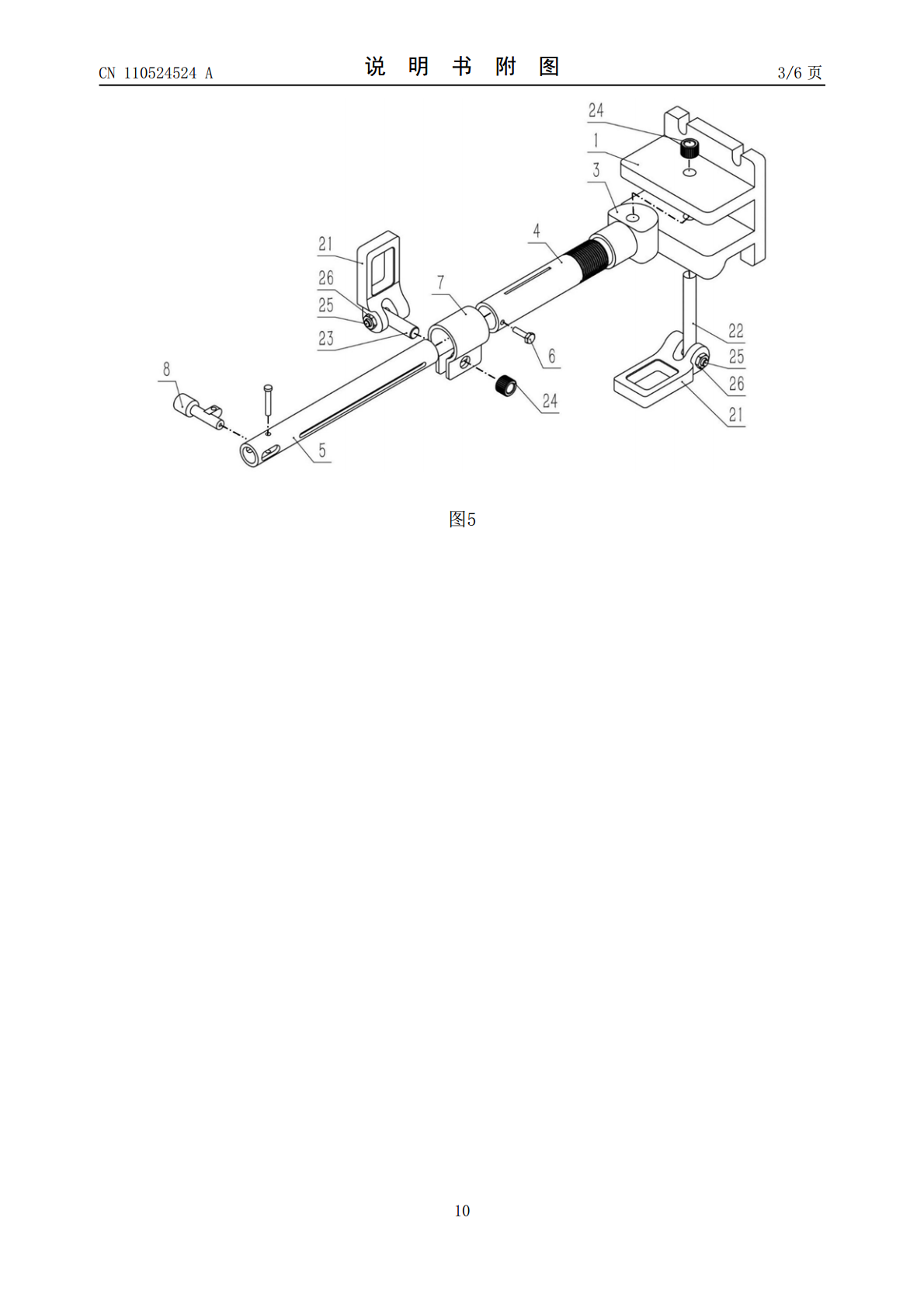
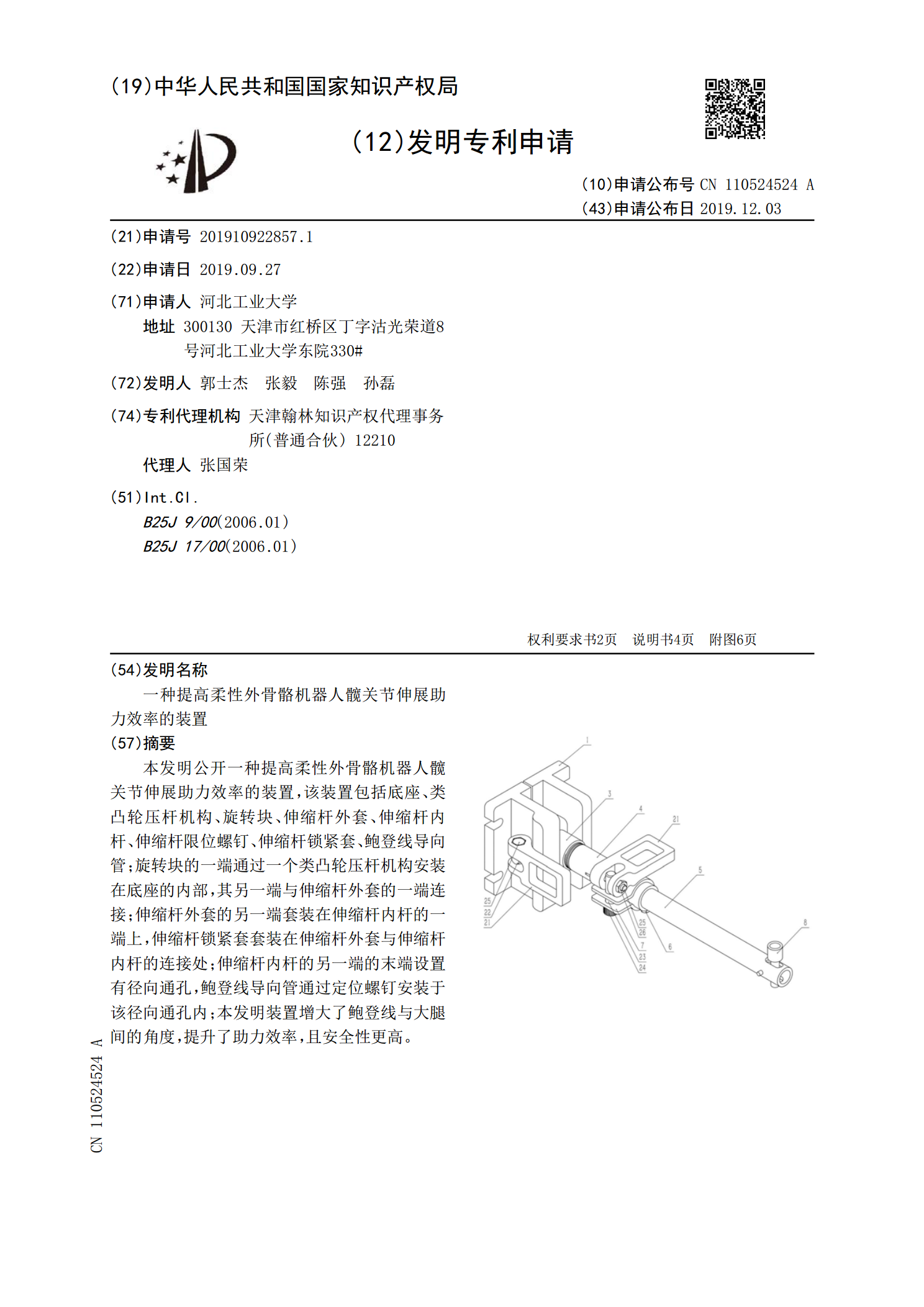
本发明公开一种提高柔性外骨骼机器人髋关节伸展助力效率的装置,该装置包括底座、类凸轮压杆机构、旋转块、伸缩杆外套、伸缩杆内杆、伸缩杆限位螺钉、伸缩杆锁紧套、鲍登线导向管;旋转块的一端通过一个类凸轮压杆机构安装在底座的内部,其另一端与伸缩杆外套的一端连接;伸缩杆外套的另一端套装在伸缩杆内杆的一端上,伸缩杆锁紧套套装在伸缩杆外套与伸缩杆内杆的连接处;伸缩杆内杆的另一端的末端设置有径向通孔,鲍登线导向管通过定位螺钉安装于该径向通孔内;本发明装置增大了鲍登线与大腿间的角度,提升了助力效率,且安全性更高。
一种髋关节助力外骨骼.pdf
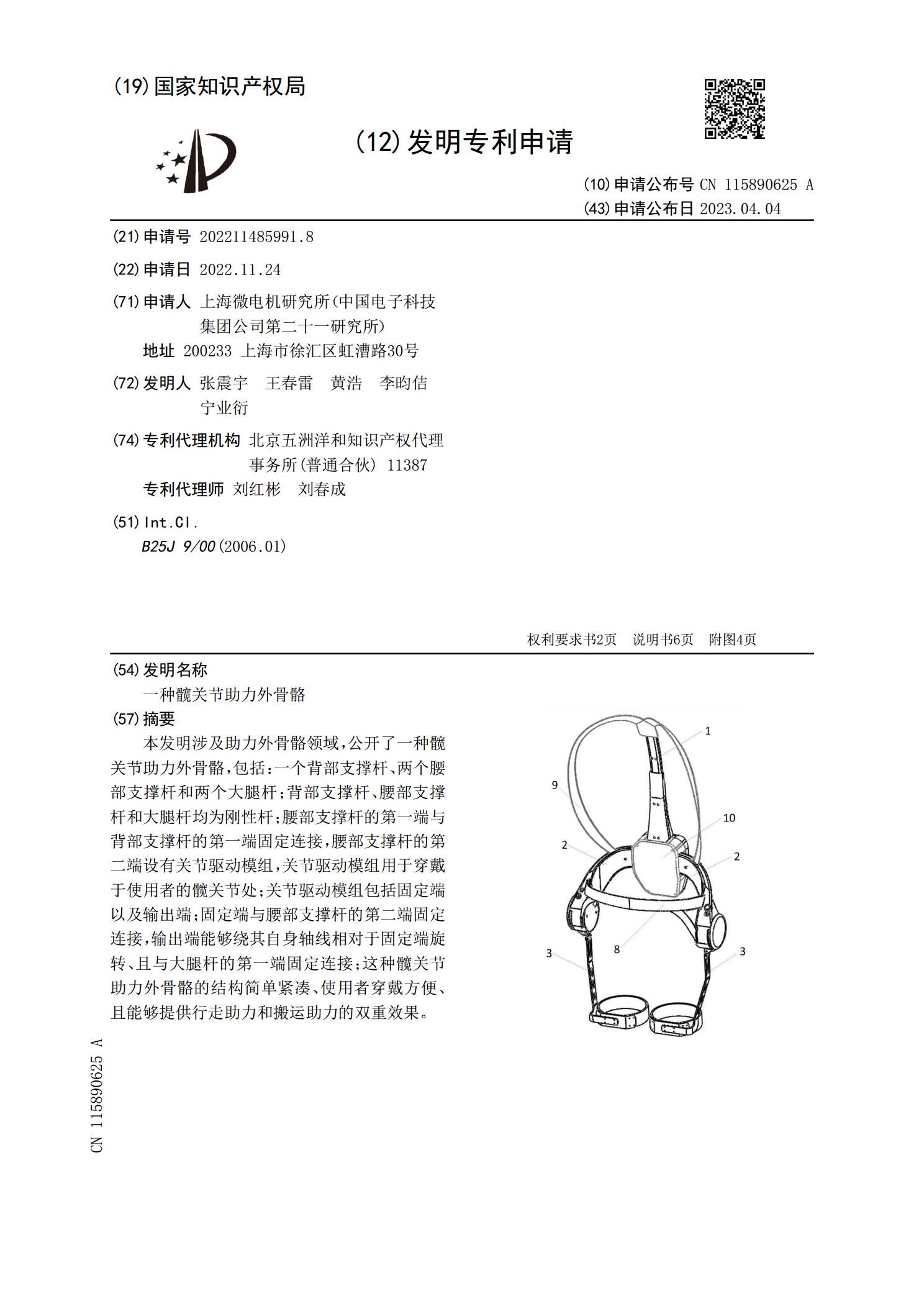
本发明涉及助力外骨骼领域,公开了一种髋关节助力外骨骼,包括:一个背部支撑杆、两个腰部支撑杆和两个大腿杆;背部支撑杆、腰部支撑杆和大腿杆均为刚性杆;腰部支撑杆的第一端与背部支撑杆的第一端固定连接,腰部支撑杆的第二端设有关节驱动模组,关节驱动模组用于穿戴于使用者的髋关节处;关节驱动模组包括固定端以及输出端;固定端与腰部支撑杆的第二端固定连接,输出端能够绕其自身轴线相对于固定端旋转、且与大腿杆的第一端固定连接;这种髋关节助力外骨骼的结构简单紧凑、使用者穿戴方便、且能够提供行走助力和搬运助力的双重效果。
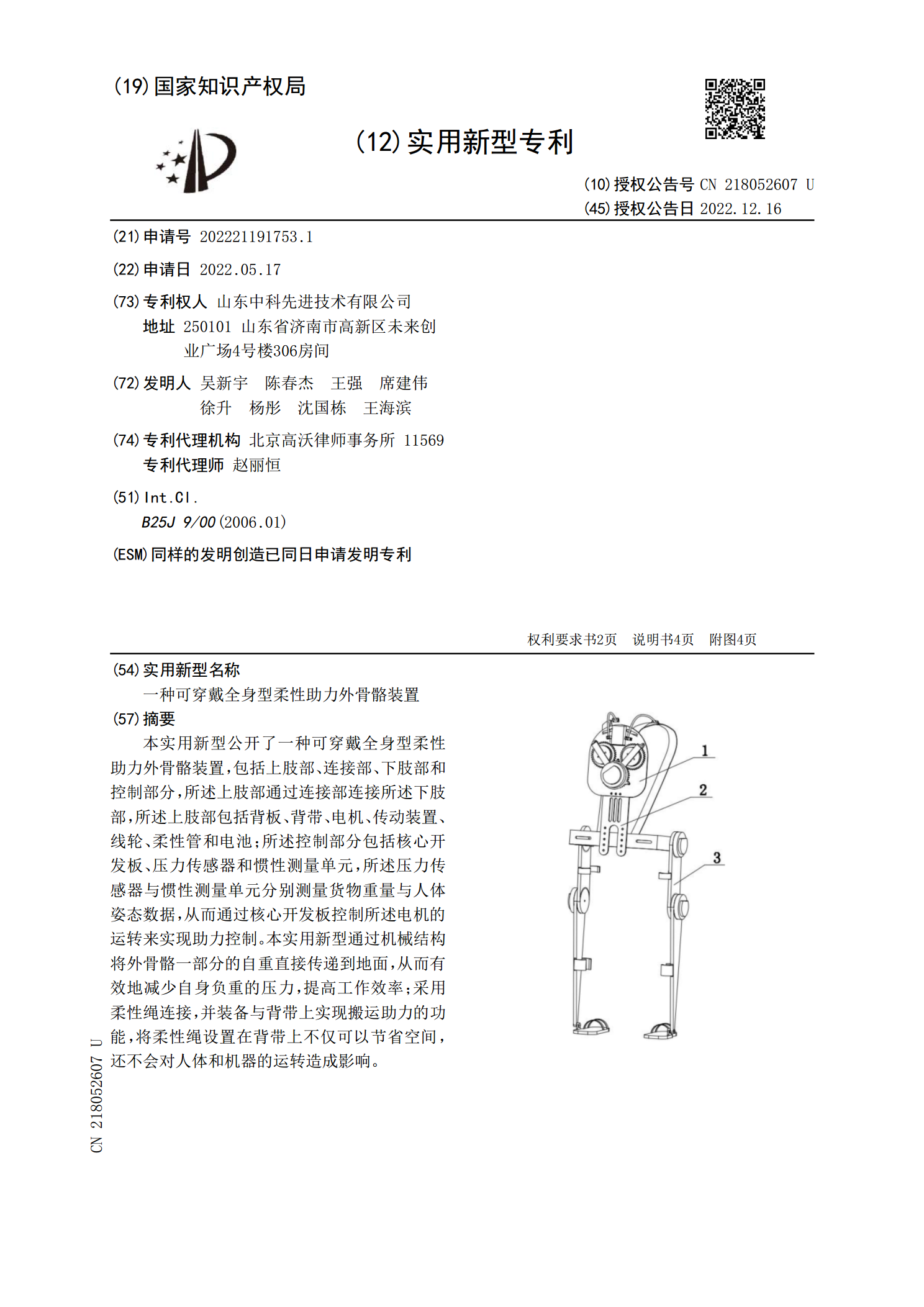
一种可穿戴全身型柔性助力外骨骼装置.pdf
本实用新型公开了一种可穿戴全身型柔性助力外骨骼装置,包括上肢部、连接部、下肢部和控制部分,所述上肢部通过连接部连接所述下肢部,所述上肢部包括背板、背带、电机、传动装置、线轮、柔性管和电池;所述控制部分包括核心开发板、压力传感器和惯性测量单元,所述压力传感器与惯性测量单元分别测量货物重量与人体姿态数据,从而通过核心开发板控制所述电机的运转来实现助力控制。本实用新型通过机械结构将外骨骼一部分的自重直接传递到地面,从而有效地减少自身负重的压力,提高工作效率;采用柔性绳连接,并装备与背带上实现搬运助力的功能,将柔
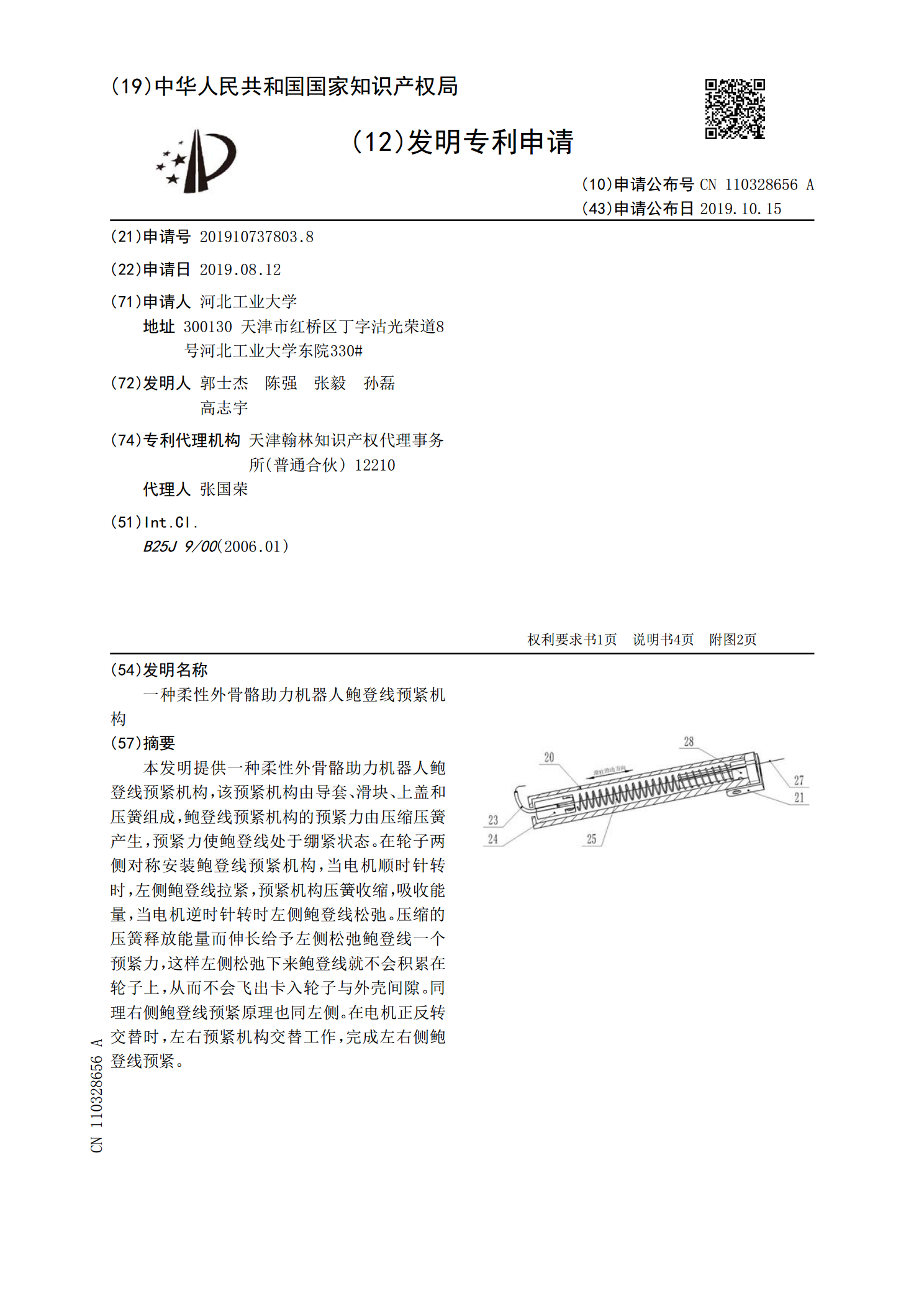
一种柔性外骨骼助力机器人鲍登线预紧机构.pdf
本发明提供一种柔性外骨骼助力机器人鲍登线预紧机构,该预紧机构由导套、滑块、上盖和压簧组成,鲍登线预紧机构的预紧力由压缩压簧产生,预紧力使鲍登线处于绷紧状态。在轮子两侧对称安装鲍登线预紧机构,当电机顺时针转时,左侧鲍登线拉紧,预紧机构压簧收缩,吸收能量,当电机逆时针转时左侧鲍登线松弛。压缩的压簧释放能量而伸长给予左侧松弛鲍登线一个预紧力,这样左侧松弛下来鲍登线就不会积累在轮子上,从而不会飞出卡入轮子与外壳间隙。同理右侧鲍登线预紧原理也同左侧。在电机正反转交替时,左右预紧机构交替工作,完成左右侧鲍登线预紧。
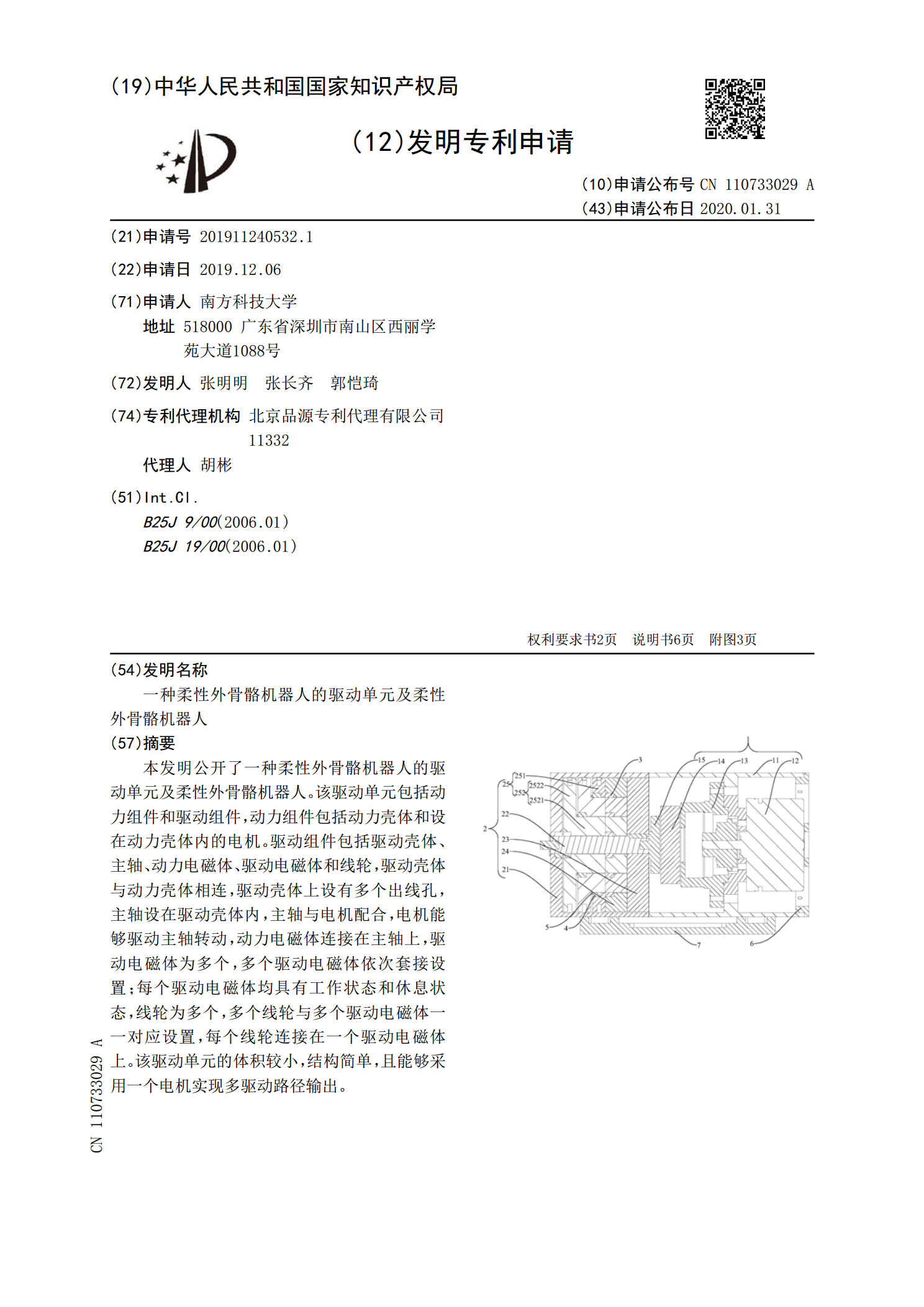
一种柔性外骨骼机器人的驱动单元及柔性外骨骼机器人.pdf
本发明公开了一种柔性外骨骼机器人的驱动单元及柔性外骨骼机器人。该驱动单元包括动力组件和驱动组件,动力组件包括动力壳体和设在动力壳体内的电机。驱动组件包括驱动壳体、主轴、动力电磁体、驱动电磁体和线轮,驱动壳体与动力壳体相连,驱动壳体上设有多个出线孔,主轴设在驱动壳体内,主轴与电机配合,电机能够驱动主轴转动,动力电磁体连接在主轴上,驱动电磁体为多个,多个驱动电磁体依次套接设置;每个驱动电磁体均具有工作状态和休息状态,线轮为多个,多个线轮与多个驱动电磁体一一对应设置,每个线轮连接在一个驱动电磁体上。该驱动单元的