
一种柔性外骨骼助力机器人鲍登线预紧机构.pdf

Ja****20

1/8

2/8
3/8
4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种柔性外骨骼助力机器人鲍登线预紧机构.pdf
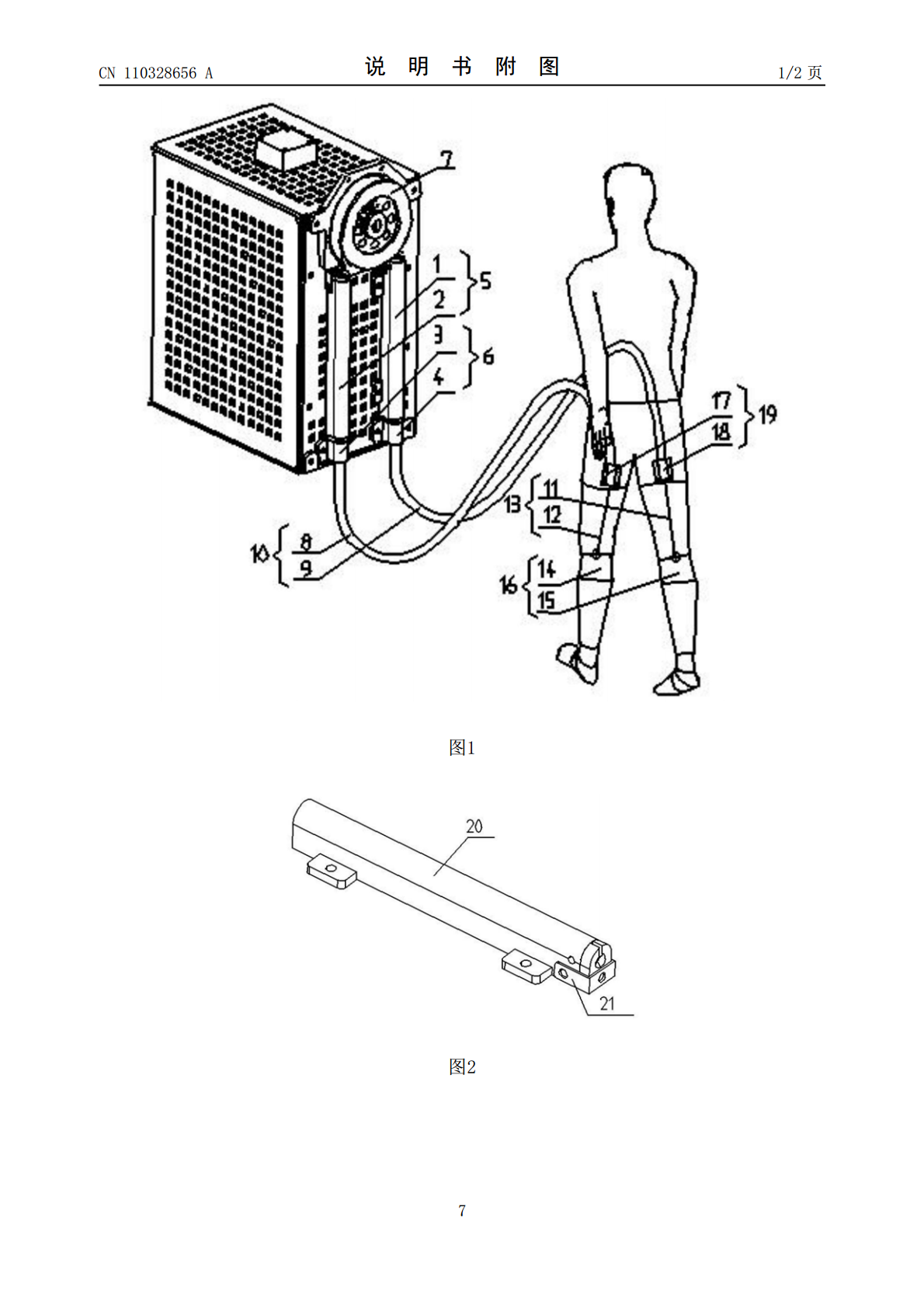
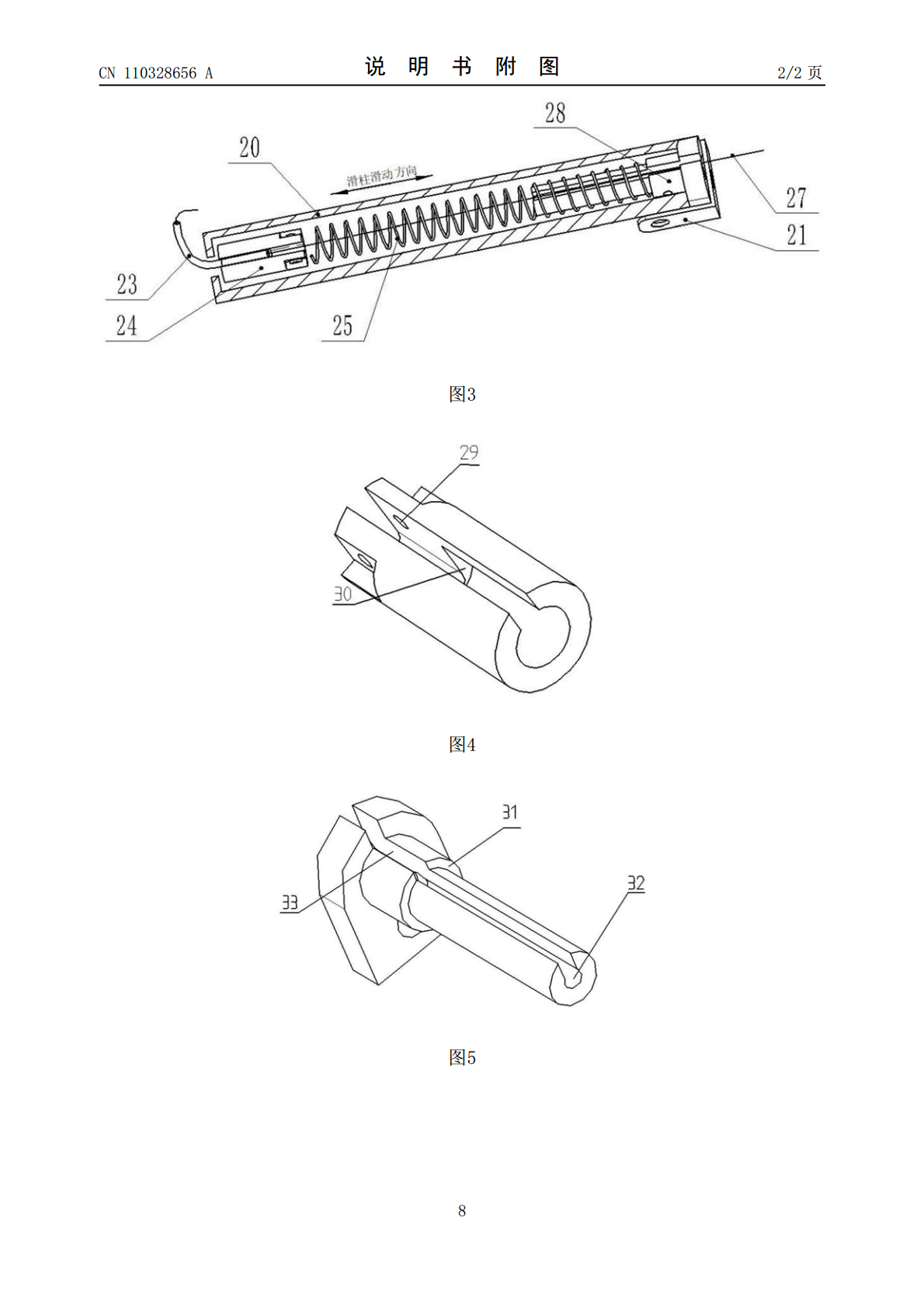
本发明提供一种柔性外骨骼助力机器人鲍登线预紧机构,该预紧机构由导套、滑块、上盖和压簧组成,鲍登线预紧机构的预紧力由压缩压簧产生,预紧力使鲍登线处于绷紧状态。在轮子两侧对称安装鲍登线预紧机构,当电机顺时针转时,左侧鲍登线拉紧,预紧机构压簧收缩,吸收能量,当电机逆时针转时左侧鲍登线松弛。压缩的压簧释放能量而伸长给予左侧松弛鲍登线一个预紧力,这样左侧松弛下来鲍登线就不会积累在轮子上,从而不会飞出卡入轮子与外壳间隙。同理右侧鲍登线预紧原理也同左侧。在电机正反转交替时,左右预紧机构交替工作,完成左右侧鲍登线预紧。
一种柔性外骨骼机器人的驱动单元及柔性外骨骼机器人.pdf
本发明公开了一种柔性外骨骼机器人的驱动单元及柔性外骨骼机器人。该驱动单元包括动力组件和驱动组件,动力组件包括动力壳体和设在动力壳体内的电机。驱动组件包括驱动壳体、主轴、动力电磁体、驱动电磁体和线轮,驱动壳体与动力壳体相连,驱动壳体上设有多个出线孔,主轴设在驱动壳体内,主轴与电机配合,电机能够驱动主轴转动,动力电磁体连接在主轴上,驱动电磁体为多个,多个驱动电磁体依次套接设置;每个驱动电磁体均具有工作状态和休息状态,线轮为多个,多个线轮与多个驱动电磁体一一对应设置,每个线轮连接在一个驱动电磁体上。该驱动单元的
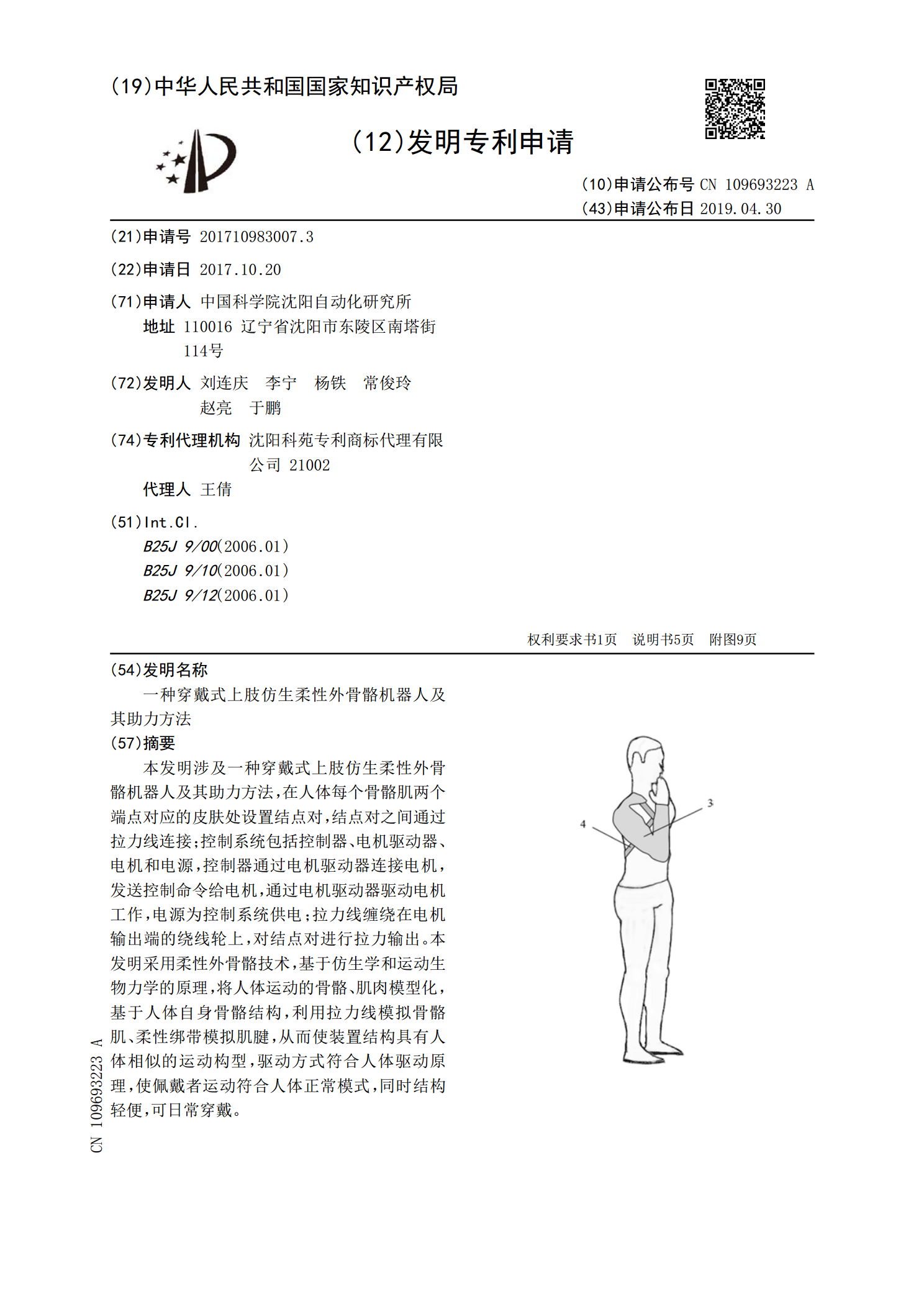
一种穿戴式上肢仿生柔性外骨骼机器人及其助力方法.pdf
本发明涉及一种穿戴式上肢仿生柔性外骨骼机器人及其助力方法,在人体每个骨骼肌两个端点对应的皮肤处设置结点对,结点对之间通过拉力线连接;控制系统包括控制器、电机驱动器、电机和电源,控制器通过电机驱动器连接电机,发送控制命令给电机,通过电机驱动器驱动电机工作,电源为控制系统供电;拉力线缠绕在电机输出端的绕线轮上,对结点对进行拉力输出。本发明采用柔性外骨骼技术,基于仿生学和运动生物力学的原理,将人体运动的骨骼、肌肉模型化,基于人体自身骨骼结构,利用拉力线模拟骨骼肌、柔性绑带模拟肌腱,从而使装置结构具有人体相似的运
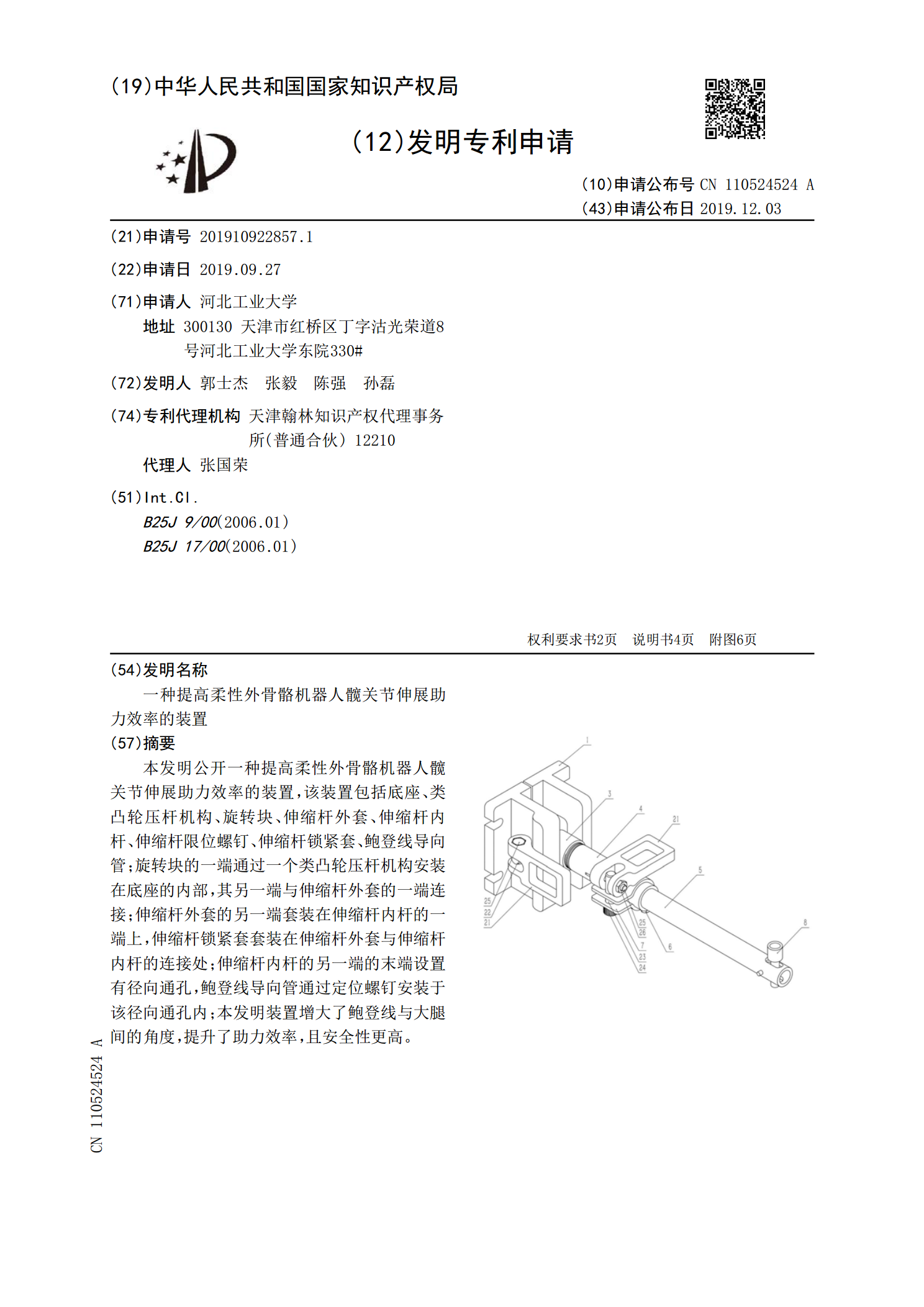
一种提高柔性外骨骼机器人髋关节伸展助力效率的装置.pdf
本发明公开一种提高柔性外骨骼机器人髋关节伸展助力效率的装置,该装置包括底座、类凸轮压杆机构、旋转块、伸缩杆外套、伸缩杆内杆、伸缩杆限位螺钉、伸缩杆锁紧套、鲍登线导向管;旋转块的一端通过一个类凸轮压杆机构安装在底座的内部,其另一端与伸缩杆外套的一端连接;伸缩杆外套的另一端套装在伸缩杆内杆的一端上,伸缩杆锁紧套套装在伸缩杆外套与伸缩杆内杆的连接处;伸缩杆内杆的另一端的末端设置有径向通孔,鲍登线导向管通过定位螺钉安装于该径向通孔内;本发明装置增大了鲍登线与大腿间的角度,提升了助力效率,且安全性更高。
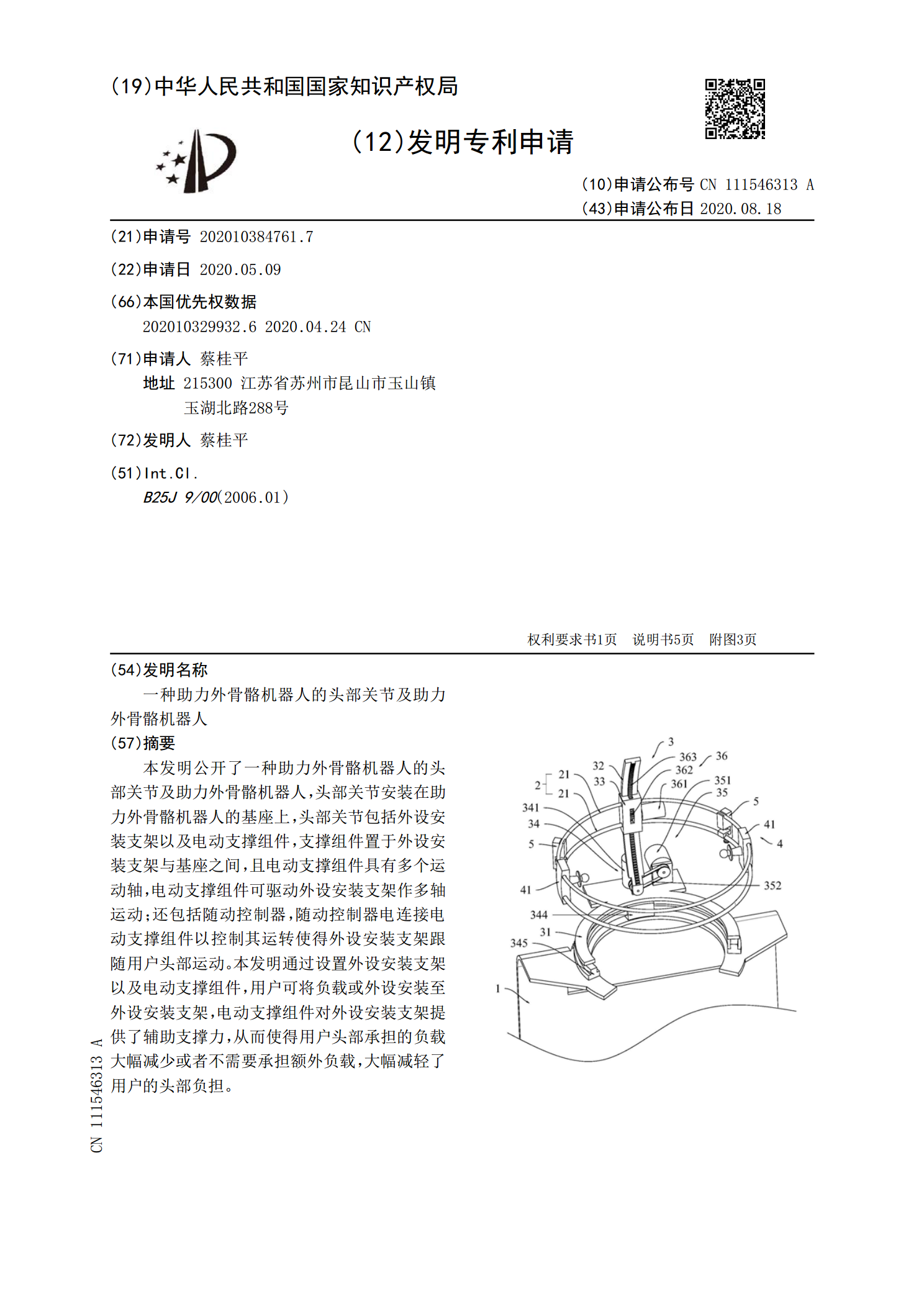
一种助力外骨骼机器人的头部关节及助力外骨骼机器人.pdf
本发明公开了一种助力外骨骼机器人的头部关节及助力外骨骼机器人,头部关节安装在助力外骨骼机器人的基座上,头部关节包括外设安装支架以及电动支撑组件,支撑组件置于外设安装支架与基座之间,且电动支撑组件具有多个运动轴,电动支撑组件可驱动外设安装支架作多轴运动;还包括随动控制器,随动控制器电连接电动支撑组件以控制其运转使得外设安装支架跟随用户头部运动。本发明通过设置外设安装支架以及电动支撑组件,用户可将负载或外设安装至外设安装支架,电动支撑组件对外设安装支架提供了辅助支撑力,从而使得用户头部承担的负载大幅减少或者不