
抹平机器人.pdf

Ma****57


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
抹平机器人.pdf
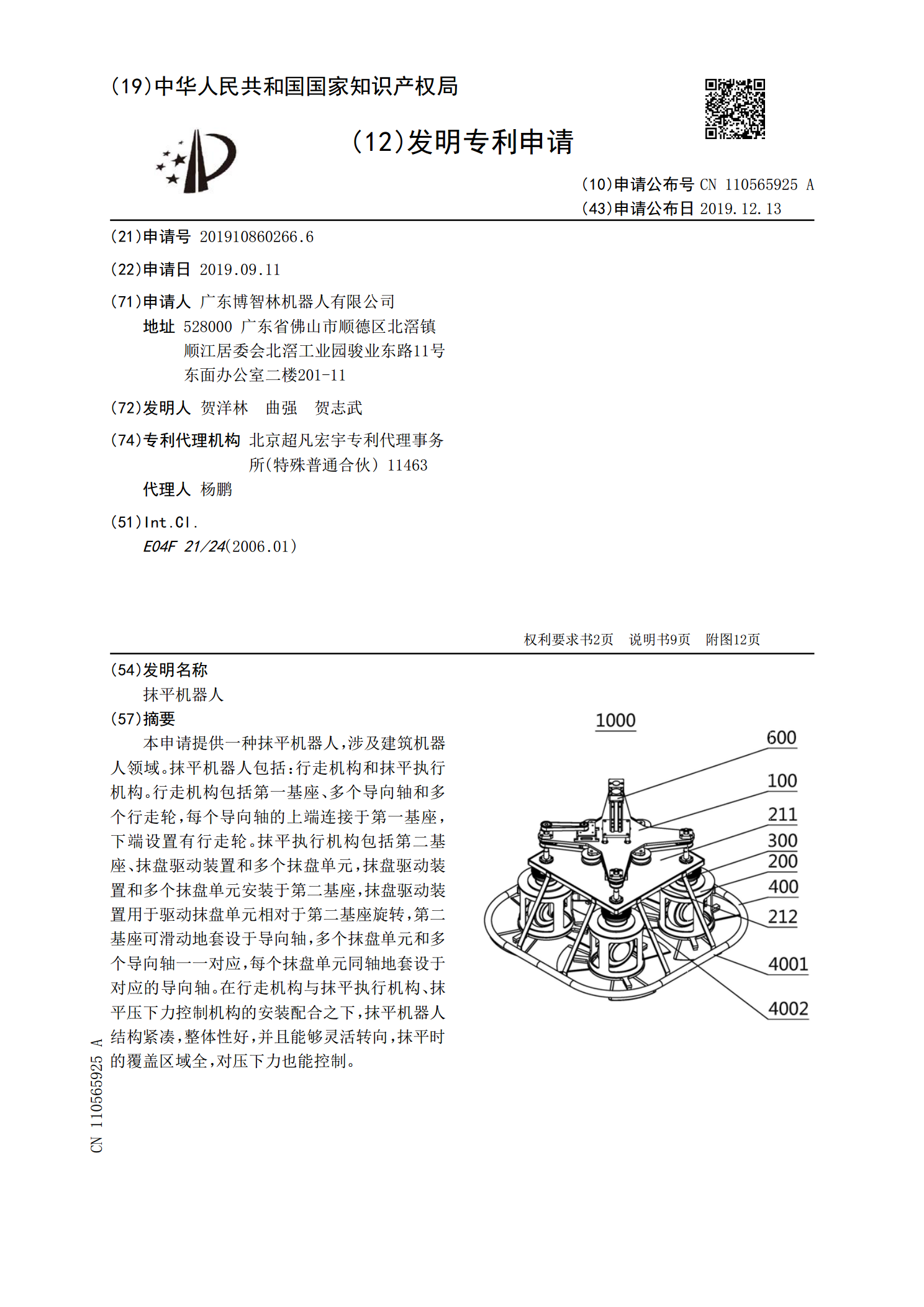
本申请提供一种抹平机器人,涉及建筑机器人领域。抹平机器人包括:行走机构和抹平执行机构。行走机构包括第一基座、多个导向轴和多个行走轮,每个导向轴的上端连接于第一基座,下端设置有行走轮。抹平执行机构包括第二基座、抹盘驱动装置和多个抹盘单元,抹盘驱动装置和多个抹盘单元安装于第二基座,抹盘驱动装置用于驱动抹盘单元相对于第二基座旋转,第二基座可滑动地套设于导向轴,多个抹盘单元和多个导向轴一一对应,每个抹盘单元同轴地套设于对应的导向轴。在行走机构与抹平执行机构、抹平压下力控制机构的安装配合之下,抹平机器人结构紧凑,整
抹平机器人.pdf
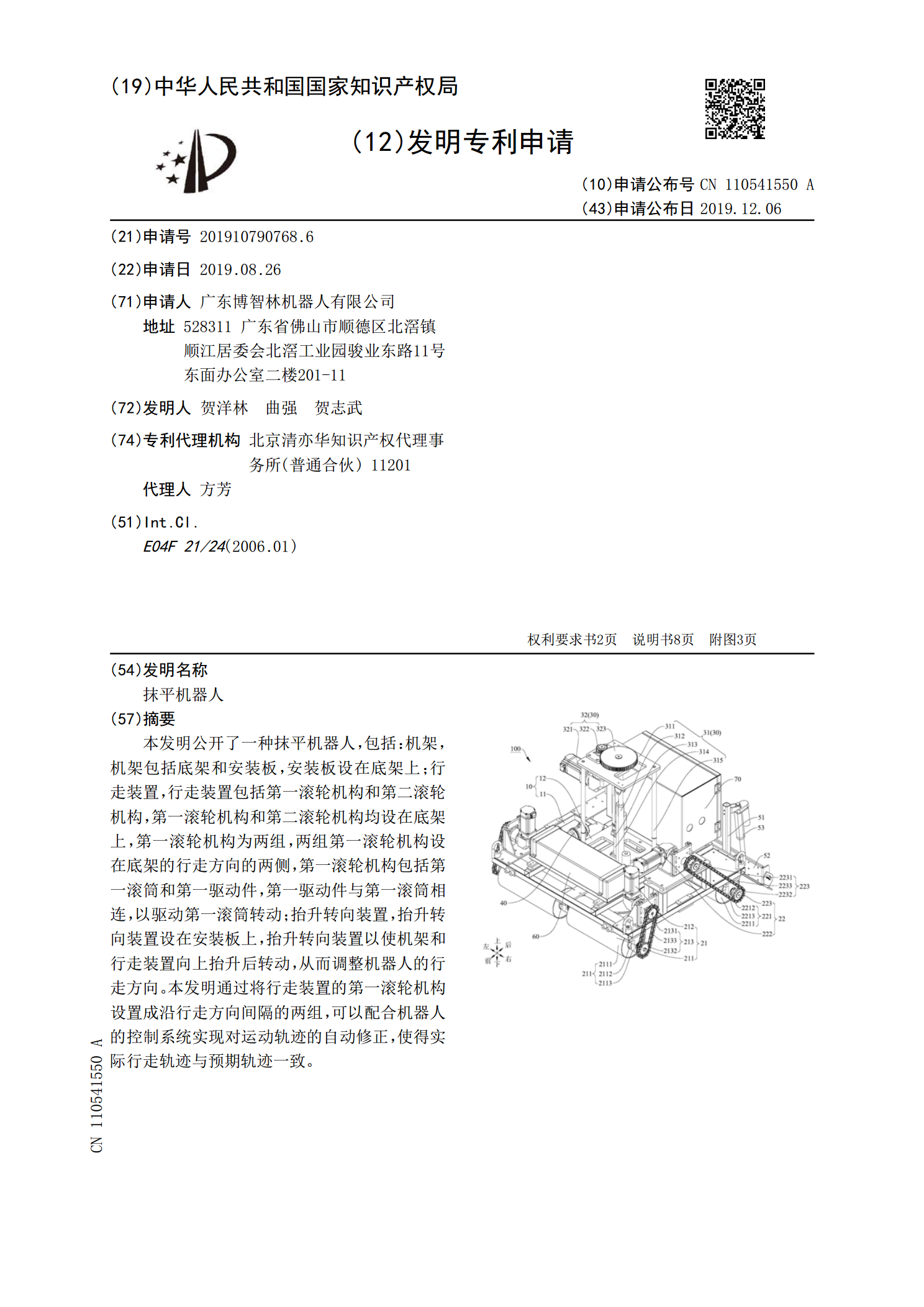
本发明公开了一种抹平机器人,包括:机架,机架包括底架和安装板,安装板设在底架上;行走装置,行走装置包括第一滚轮机构和第二滚轮机构,第一滚轮机构和第二滚轮机构均设在底架上,第一滚轮机构为两组,两组第一滚轮机构设在底架的行走方向的两侧,第一滚轮机构包括第一滚筒和第一驱动件,第一驱动件与第一滚筒相连,以驱动第一滚筒转动;抬升转向装置,抬升转向装置设在安装板上,抬升转向装置以使机架和行走装置向上抬升后转动,从而调整机器人的行走方向。本发明通过将行走装置的第一滚轮机构设置成沿行走方向间隔的两组,可以配合机器人的控制
抹平机器人.pdf
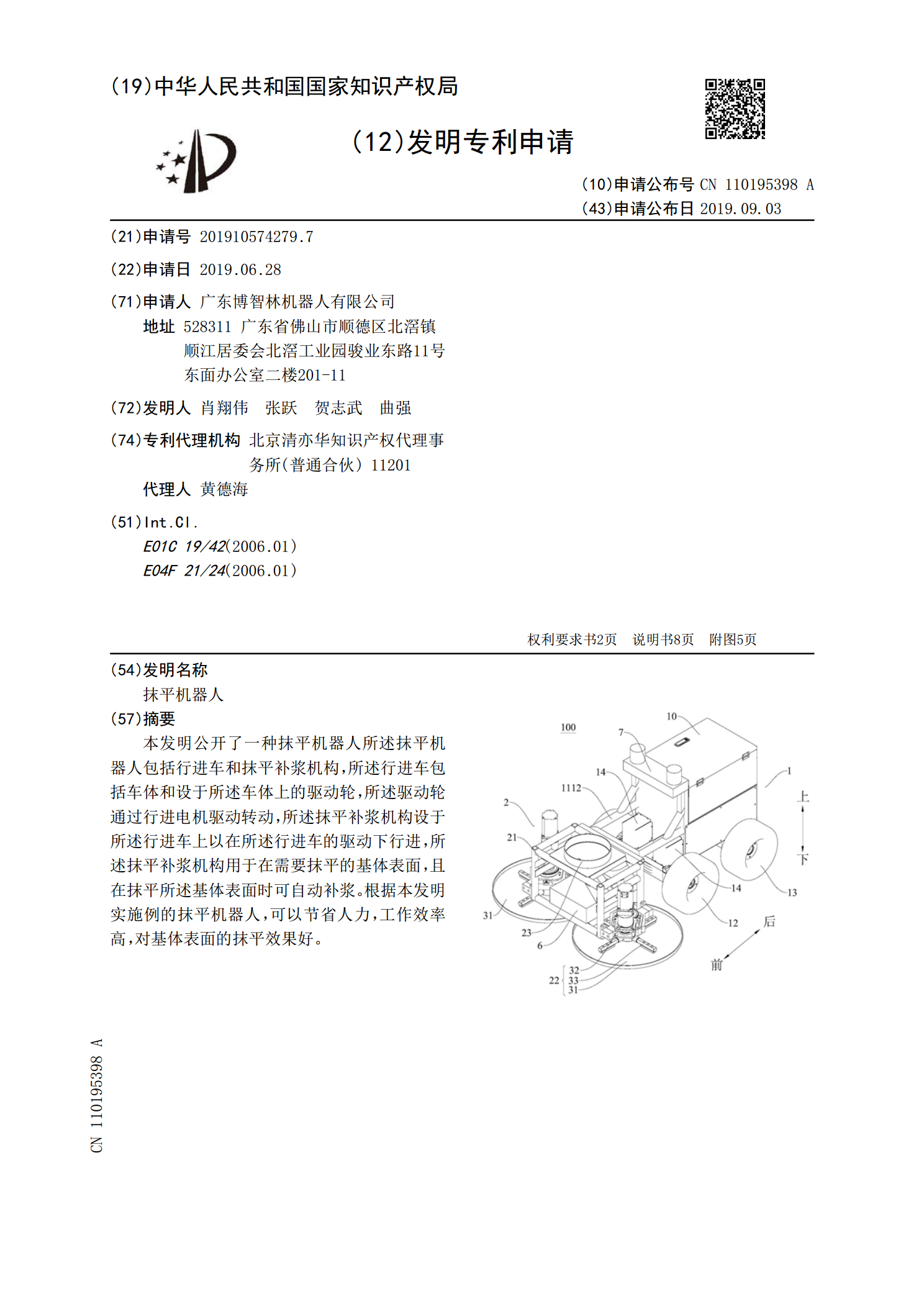
本发明公开了一种抹平机器人所述抹平机器人包括行进车和抹平补浆机构,所述行进车包括车体和设于所述车体上的驱动轮,所述驱动轮通过行进电机驱动转动,所述抹平补浆机构设于所述行进车上以在所述行进车的驱动下行进,所述抹平补浆机构用于在需要抹平的基体表面,且在抹平所述基体表面时可自动补浆。根据本发明实施例的抹平机器人,可以节省人力,工作效率高,对基体表面的抹平效果好。
刮平抹平机器人.pdf
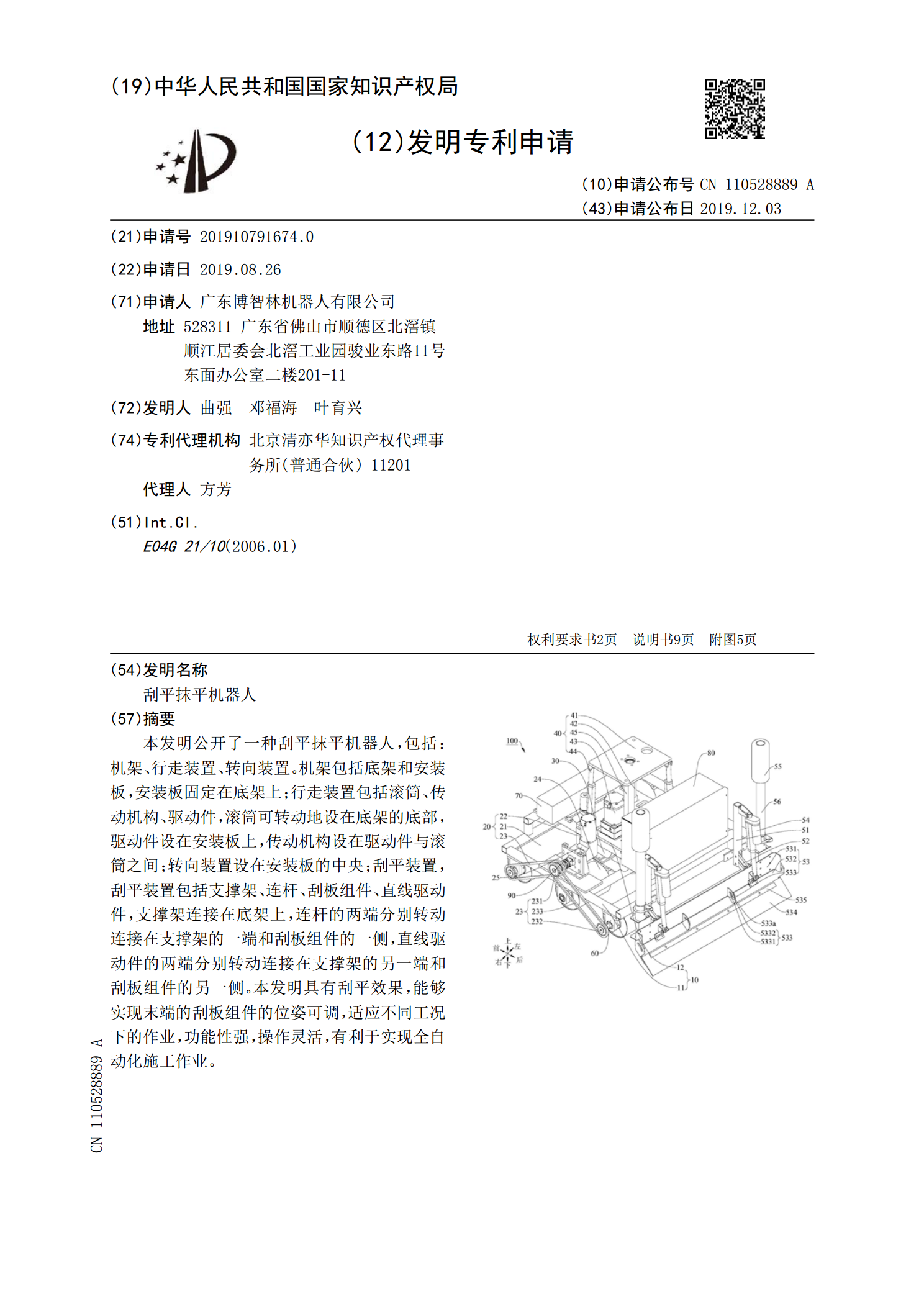
本发明公开了一种刮平抹平机器人,包括:机架、行走装置、转向装置。机架包括底架和安装板,安装板固定在底架上;行走装置包括滚筒、传动机构、驱动件,滚筒可转动地设在底架的底部,驱动件设在安装板上,传动机构设在驱动件与滚筒之间;转向装置设在安装板的中央;刮平装置,刮平装置包括支撑架、连杆、刮板组件、直线驱动件,支撑架连接在底架上,连杆的两端分别转动连接在支撑架的一端和刮板组件的一侧,直线驱动件的两端分别转动连接在支撑架的另一端和刮板组件的另一侧。本发明具有刮平效果,能够实现末端的刮板组件的位姿可调,适应不同工况下
抹平机器人的补浆装置及抹平机器人.pdf
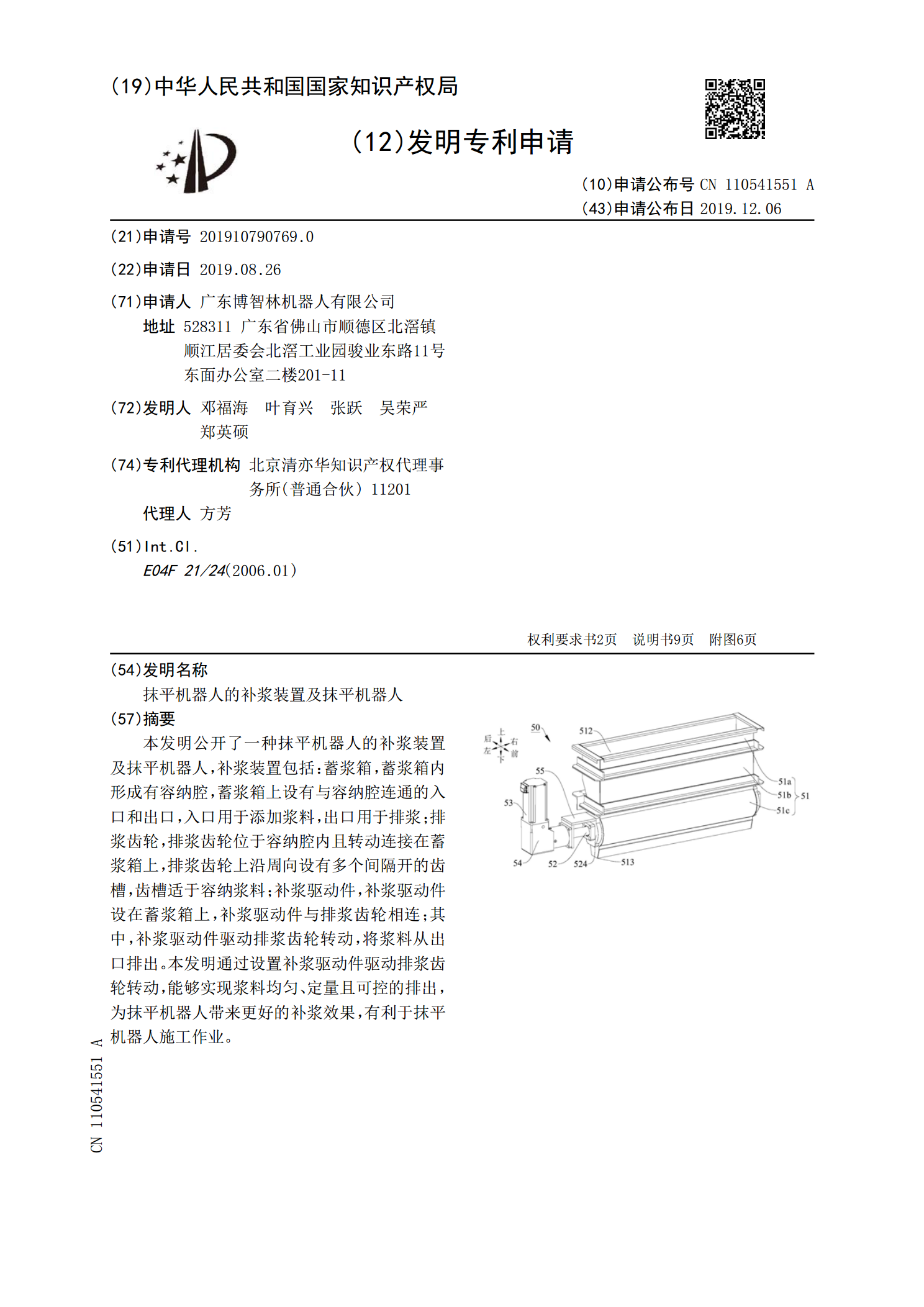
本发明公开了一种抹平机器人的补浆装置及抹平机器人,补浆装置包括:蓄浆箱,蓄浆箱内形成有容纳腔,蓄浆箱上设有与容纳腔连通的入口和出口,入口用于添加浆料,出口用于排浆;排浆齿轮,排浆齿轮位于容纳腔内且转动连接在蓄浆箱上,排浆齿轮上沿周向设有多个间隔开的齿槽,齿槽适于容纳浆料;补浆驱动件,补浆驱动件设在蓄浆箱上,补浆驱动件与排浆齿轮相连;其中,补浆驱动件驱动排浆齿轮转动,将浆料从出口排出。本发明通过设置补浆驱动件驱动排浆齿轮转动,能够实现浆料均匀、定量且可控的排出,为抹平机器人带来更好的补浆效果,有利于抹平机器