
履带式仿生行走康复机器人.pdf

玄静****写意

1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

履带式仿生行走康复机器人.pdf
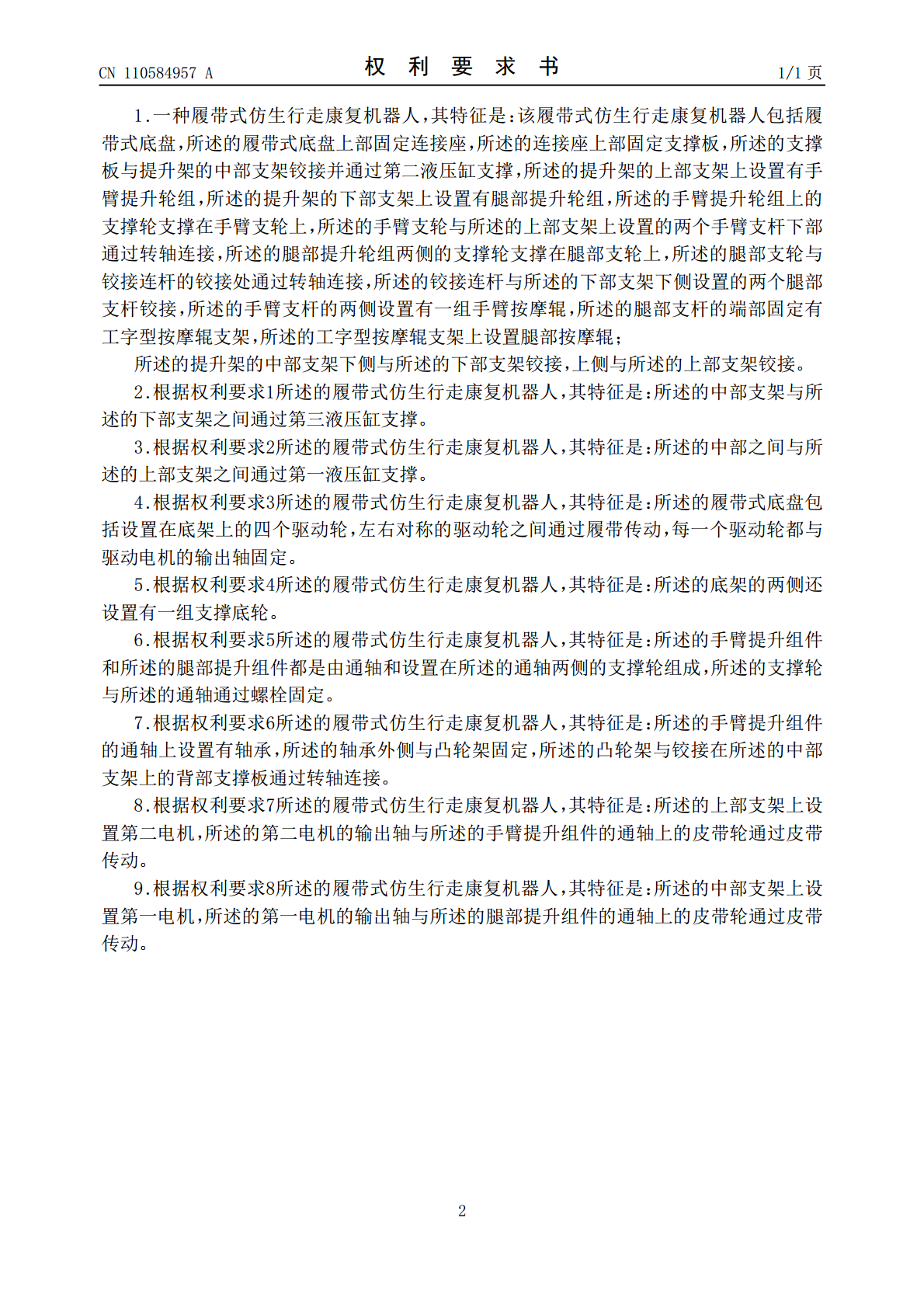
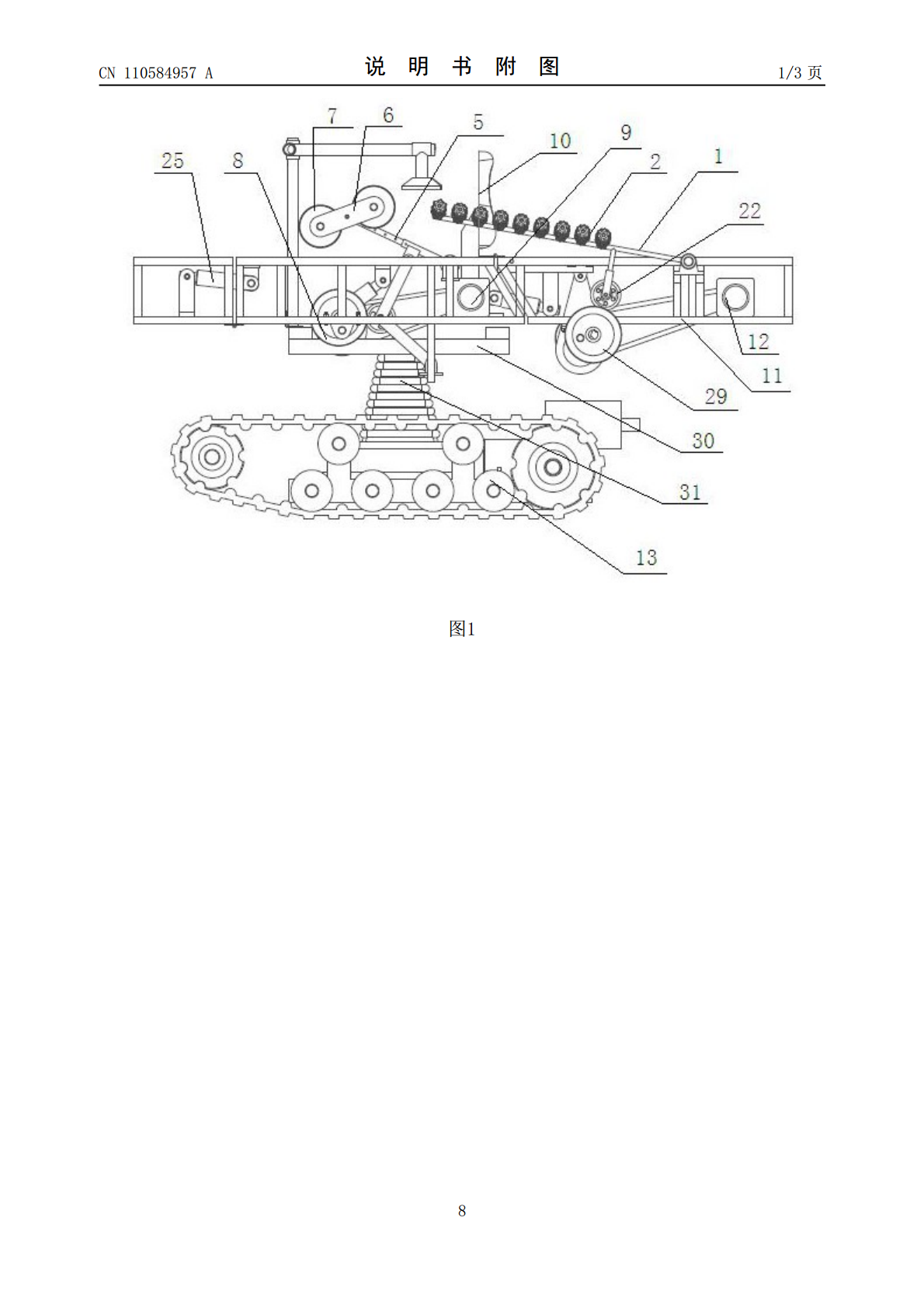
履带式仿生行走康复机器人。目前想要对瘫痪病人的手脚进行适当的锻炼时,需要靠人来帮忙,十分麻烦。本发明组成包括:该履带式仿生行走康复机器人包括履带式底盘(13),履带式底盘上部固定连接座(31),连接座上部固定支撑板(30),支撑板与提升架(11)的中部支架(26)铰接并通过第二液压缸(15)支撑,提升架的上部支架(28)上设置有手臂提升轮组(29),提升架的下部支架(27)上设置有腿部提升轮组(8)。本发明用于仿生行走。

轮式仿生行走康复机器人.pdf
轮式仿生行走康复机器人。目前想要对瘫痪病人的手脚进行适当的锻炼时,需要靠人来帮忙,十分麻烦。本发明组成包括:底架(13),底架与提升架(11)的下部铰接并通过支撑液压缸(14)支撑,提升架上下两侧分别设置抬升轮组(8),上侧抬升轮组上的支撑轮(16)支撑在手臂支轮(22)上,手臂支轮与底架上侧设置的两个手臂支杆(1)下部通过转轴连接,下侧抬升轮组两侧的支撑轮支撑在腿部支轮(23)上,腿部支轮与铰接连杆(21)的铰接处通过转轴连接,铰接连杆与底架下侧设置的两个腿部支杆(5)铰接,手臂支杆的两侧设置有一组手臂

履带式行走机器人.doc
长春工业大学毕业设计论文1绪论1.1机器人发展概况在工业机器入问世30多年后的今天;机器人己被人们看作是一种生产工具。在制造、装配及服务行业,机器入的应用取得了明显的进步。由干传感器、控制、驱动及材料等领域的技术进步,通过智能机器人系统首次在制造领域以外的服务行业,开辟了机器人应用的新领域,让机器人作为“人的助手”,使人们的生活质量得以提高。目前在许多领域己经进行了很大的努力来开发服务机器入系统,并力争在较大范围内使用它们。这些机器人系统尽管有不同的应用领域,但它们所从事的工作仅限于维护保养、修理、运输、

仿生履带式粘附行走机构及其运动方法.pdf
本发明公开了一种仿生履带式粘附行走机构及其运动方法,包括机身框架、张紧机构、驱动机构、粘附带,驱动机构包括驱动电机、驱动电机齿轮、主动轮、从动轮,主动轮通过齿轮轴连接于机身框架一端,从动轮通过从动轮轴连接于机身框架另一端,驱动电机驱动驱动电机齿轮,驱动电机齿轮与齿轮轴相啮合,张紧机构包括张紧轮架、张紧弹簧、微型力传感器、张紧轮、套筒,张紧轮、主动轮、从动轮通过粘附带连接,还包括一设于机身框架上的机构连接装置。本发明通过机器人机体输出一定切向位移和位姿角度,实现脚掌粘附、脱附和按压,帮助机器人在壁面上行走和
履带式行走装置及越障机器人.pdf
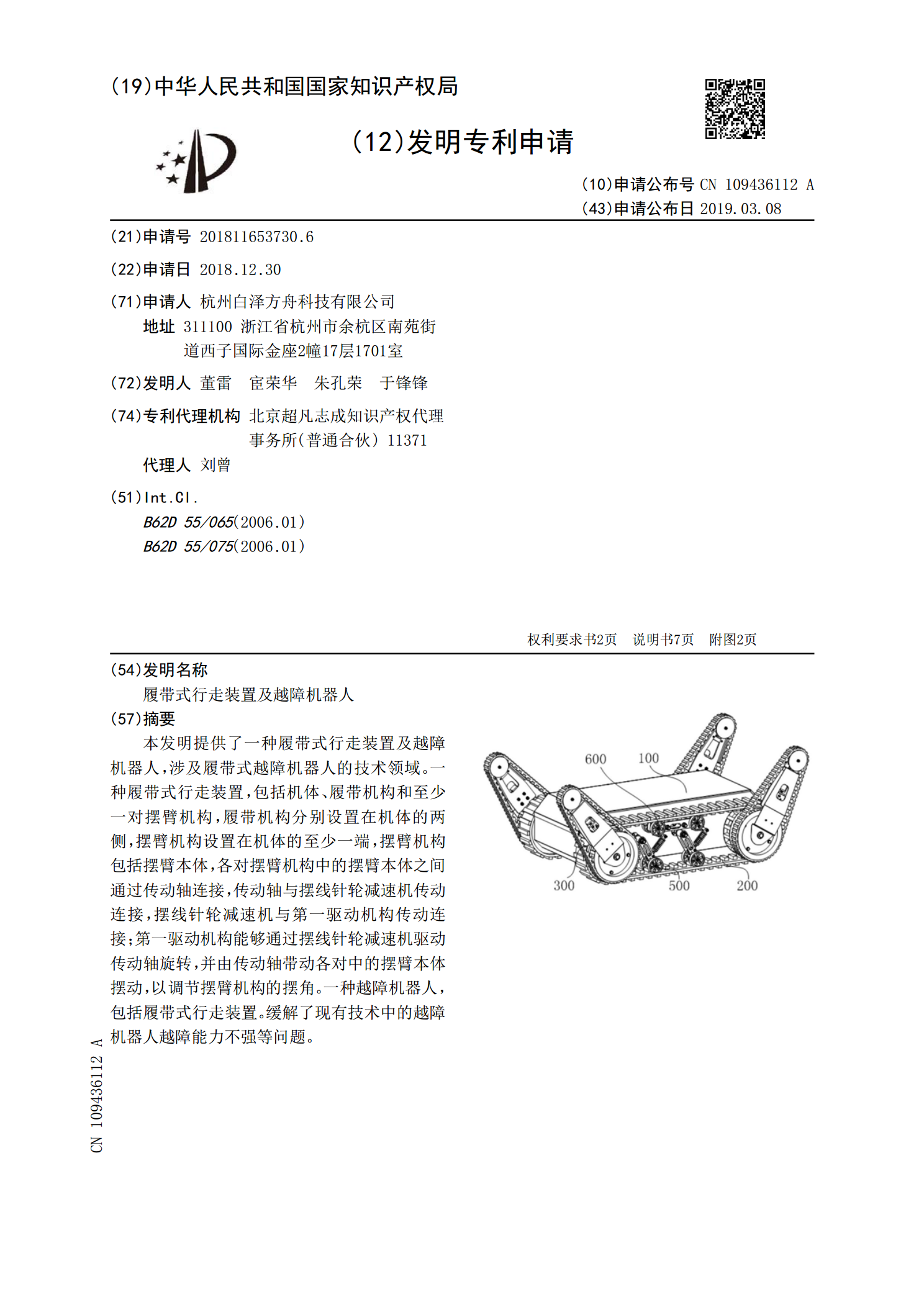
本发明提供了一种履带式行走装置及越障机器人,涉及履带式越障机器人的技术领域。一种履带式行走装置,包括机体、履带机构和至少一对摆臂机构,履带机构分别设置在机体的两侧,摆臂机构设置在机体的至少一端,摆臂机构包括摆臂本体,各对摆臂机构中的摆臂本体之间通过传动轴连接,传动轴与摆线针轮减速机传动连接,摆线针轮减速机与第一驱动机构传动连接;第一驱动机构能够通过摆线针轮减速机驱动传动轴旋转,并由传动轴带动各对中的摆臂本体摆动,以调节摆臂机构的摆角。一种越障机器人,包括履带式行走装置。缓解了现有技术中的越障机器人越障能力