
仿生履带式粘附行走机构及其运动方法.pdf

书生****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

仿生履带式粘附行走机构及其运动方法.pdf
本发明公开了一种仿生履带式粘附行走机构及其运动方法,包括机身框架、张紧机构、驱动机构、粘附带,驱动机构包括驱动电机、驱动电机齿轮、主动轮、从动轮,主动轮通过齿轮轴连接于机身框架一端,从动轮通过从动轮轴连接于机身框架另一端,驱动电机驱动驱动电机齿轮,驱动电机齿轮与齿轮轴相啮合,张紧机构包括张紧轮架、张紧弹簧、微型力传感器、张紧轮、套筒,张紧轮、主动轮、从动轮通过粘附带连接,还包括一设于机身框架上的机构连接装置。本发明通过机器人机体输出一定切向位移和位姿角度,实现脚掌粘附、脱附和按压,帮助机器人在壁面上行走和
履带式仿生爬壁机器人脚掌结构及其运动方法.pdf
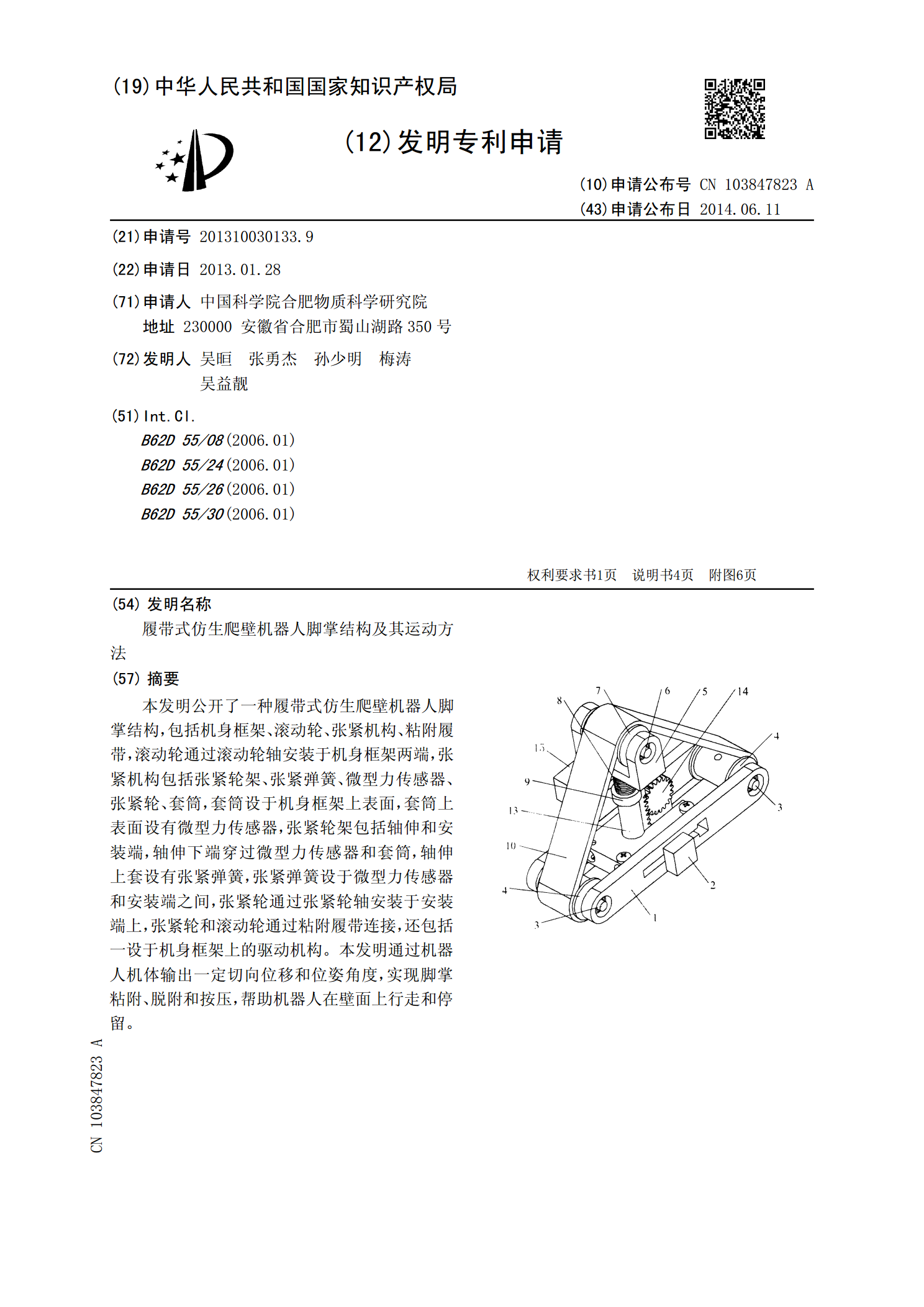
本发明公开了一种履带式仿生爬壁机器人脚掌结构,包括机身框架、滚动轮、张紧机构、粘附履带,滚动轮通过滚动轮轴安装于机身框架两端,张紧机构包括张紧轮架、张紧弹簧、微型力传感器、张紧轮、套筒,套筒设于机身框架上表面,套筒上表面设有微型力传感器,张紧轮架包括轴伸和安装端,轴伸下端穿过微型力传感器和套筒,轴伸上套设有张紧弹簧,张紧弹簧设于微型力传感器和安装端之间,张紧轮通过张紧轮轴安装于安装端上,张紧轮和滚动轮通过粘附履带连接,还包括一设于机身框架上的驱动机构。本发明通过机器人机体输出一定切向位移和位姿角度,实现脚
干粘附与钩爪结合四足多栖机器人及其仿生运动方法.pdf
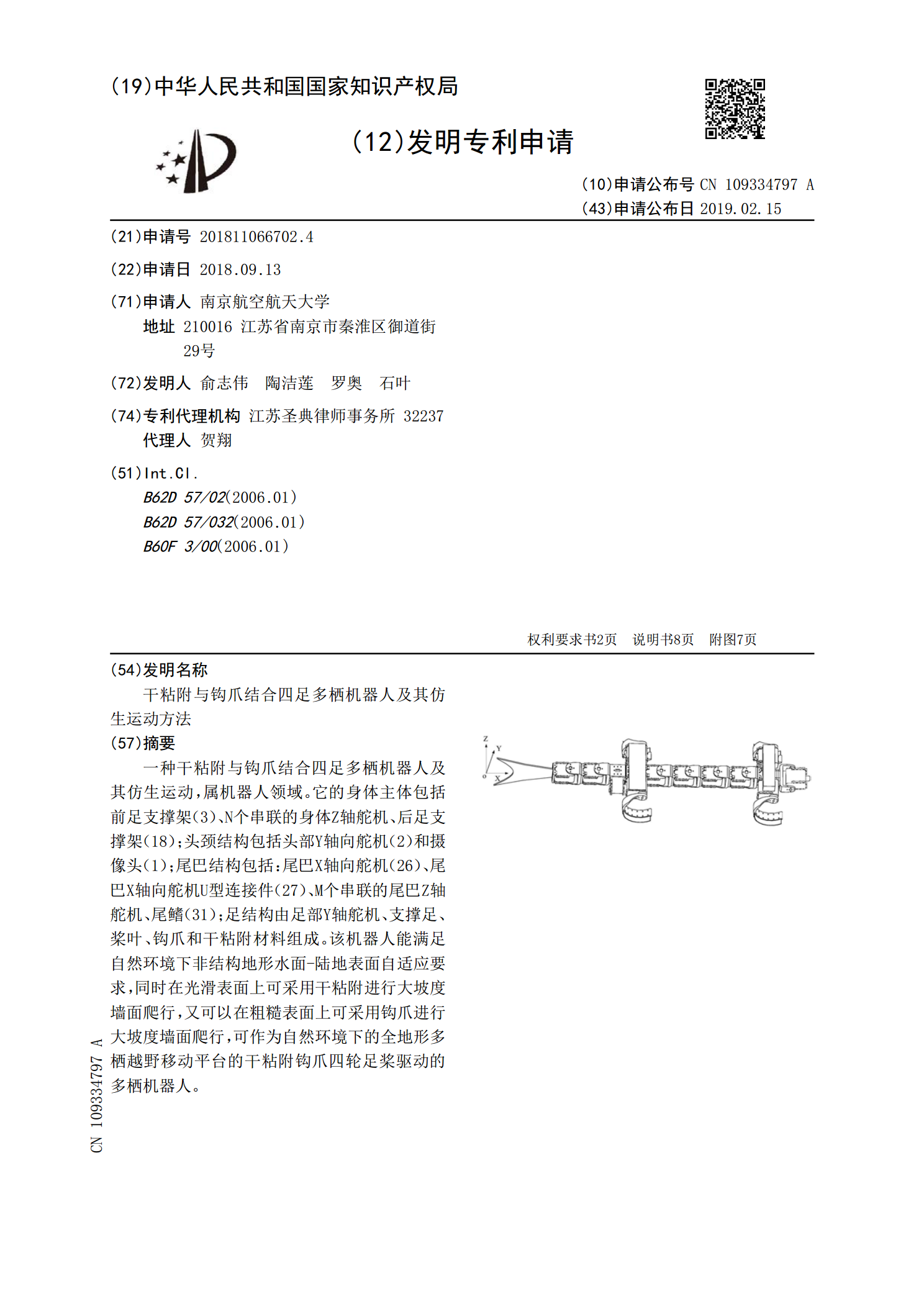
一种干粘附与钩爪结合四足多栖机器人及其仿生运动,属机器人领域。它的身体主体包括前足支撑架(3)、N个串联的身体Z轴舵机、后足支撑架(18);头颈结构包括头部Y轴向舵机(2)和摄像头(1);尾巴结构包括:尾巴X轴向舵机(26)、尾巴X轴向舵机U型连接件(27)、M个串联的尾巴Z轴舵机、尾鳍(31);足结构由足部Y轴舵机、支撑足、桨叶、钩爪和干粘附材料组成。该机器人能满足自然环境下非结构地形水面‑陆地表面自适应要求,同时在光滑表面上可采用干粘附进行大坡度墙面爬行,又可以在粗糙表面上可采用钩爪进行大坡度墙面爬行

一种用于组织粘附的仿生贴片及其制备方法.pdf
本发明公开了一种用于组织粘附的仿生贴片及其制备方法,模拟章鱼吸盘的微观结构,利用激光刻蚀技术制备出具有若干中空微柱的阴性模板,得到仿生微柱模板;制备合适尺寸的微球,所述的微球的尺寸与各个中空微柱之间的间隔相同;将微球均匀注入到仿生微柱模板的每个微柱底部;配置弹性体溶液,将弹性体溶液涂覆在仿生微柱模板表面,固化后得到贴片;利用溶剂将微球溶解后,保留贴片其余结构不变,得到的微柱结构具有半圆形弧面,形成仿生吸盘,制得具有吸盘结构的粘附贴片。本发明制备的仿生贴片可粘附于不同干、湿组织表面,可以进行反复撕脱与粘附,
一种仿生粘附纳米胶囊及其制备方法和应用.pdf
本发明公开了一种仿生粘附纳米胶囊及其制备方法和应用。仿生粘附纳米胶囊的制备包括如下:步骤1,将丙烯酸酯和多巴胺盐均匀分散在第一溶剂中,然后添加pH调节剂将反应体系调整为碱性,在加热、避光的条件下反应,纯化后得到超支化聚合物;步骤2,将精油、有机溶剂和步骤1制得的超支化聚合物均匀分散,制得油相,超支化聚合物、有机溶剂和精油的质量比为(1‑4):30:(1‑4);步骤3,将乳化剂加入到去离子水中,加热搅拌使其充分溶解,制得水相;步骤4,将油相与水相混合,均质,脱除溶剂,制得仿生粘附精油纳米胶囊。本发明的纳米胶