
履带式行走机器人.doc

天马****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共39页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

履带式行走机器人.doc
长春工业大学毕业设计论文1绪论1.1机器人发展概况在工业机器入问世30多年后的今天;机器人己被人们看作是一种生产工具。在制造、装配及服务行业,机器入的应用取得了明显的进步。由干传感器、控制、驱动及材料等领域的技术进步,通过智能机器人系统首次在制造领域以外的服务行业,开辟了机器人应用的新领域,让机器人作为“人的助手”,使人们的生活质量得以提高。目前在许多领域己经进行了很大的努力来开发服务机器入系统,并力争在较大范围内使用它们。这些机器人系统尽管有不同的应用领域,但它们所从事的工作仅限于维护保养、修理、运输、
履带式行走装置及越障机器人.pdf
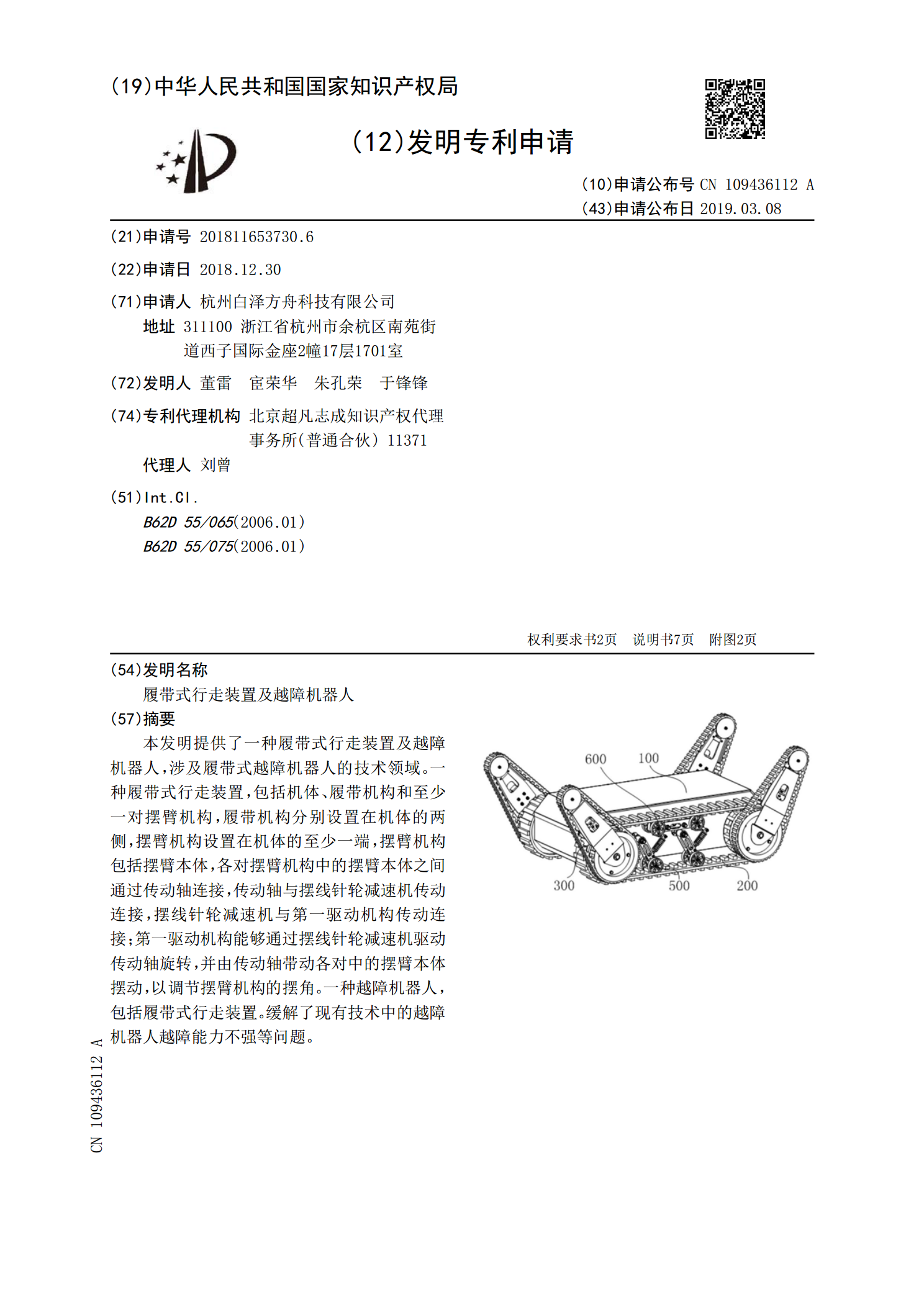
本发明提供了一种履带式行走装置及越障机器人,涉及履带式越障机器人的技术领域。一种履带式行走装置,包括机体、履带机构和至少一对摆臂机构,履带机构分别设置在机体的两侧,摆臂机构设置在机体的至少一端,摆臂机构包括摆臂本体,各对摆臂机构中的摆臂本体之间通过传动轴连接,传动轴与摆线针轮减速机传动连接,摆线针轮减速机与第一驱动机构传动连接;第一驱动机构能够通过摆线针轮减速机驱动传动轴旋转,并由传动轴带动各对中的摆臂本体摆动,以调节摆臂机构的摆角。一种越障机器人,包括履带式行走装置。缓解了现有技术中的越障机器人越障能力

履带式行走机器人工作站.pdf
履带式行走机器人工作站,属于机电一体化的机器人领域,它包括上位计算机、主控制母车和若干被控制子车,主控制母车包括车体、履带式行走机构、PLC可编程控制器,其特征是主控制母车和被控制子车的车体均为密闭的且可充气的箱体,履带式行走机构由橡胶双面齿履带、后驱动轮、前引导轮、前承载轮、后承载轮、张力轮组成,由蓄电池组为动力,分别驱动左驱动调速电机和右驱动电机,PLC可编程控制器安装在主控制母车上,运行由可调速的无刷电机驱动模块执行。本发明将多台机器人车辆,依据各自不同的功能综合在一起,在整体上协调一致,形成机器人

履带式仿生行走康复机器人.pdf
履带式仿生行走康复机器人。目前想要对瘫痪病人的手脚进行适当的锻炼时,需要靠人来帮忙,十分麻烦。本发明组成包括:该履带式仿生行走康复机器人包括履带式底盘(13),履带式底盘上部固定连接座(31),连接座上部固定支撑板(30),支撑板与提升架(11)的中部支架(26)铰接并通过第二液压缸(15)支撑,提升架的上部支架(28)上设置有手臂提升轮组(29),提升架的下部支架(27)上设置有腿部提升轮组(8)。本发明用于仿生行走。

大学毕业设计---履带式行走机器人.doc
长春工业大学毕业设计论文1绪论1.1机器人发展概况在工业机器入问世30多年后的今天;机器人己被人们看作是一种生产工具。在制造、装配及服务行业,机器入的应用取得了明显的进步。由干传感器、控制、驱动及材料等领域的技术进步,通过智能机器人系统首次在制造领域以外的服务行业,开辟了机器人应用的新领域,让机器人作为“人的助手”,使人们的生活质量得以提高。目前在许多领域己经进行了很大的努力来开发服务机器入系统,并力争在较大范围内使用它们。这些机器人系统尽管有不同的应用领域,但它们所从事的工作仅限于维护保养、修理、运输、