
一种机器人智能移载装置.pdf

静芙****可爱


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人智能移载装置.pdf
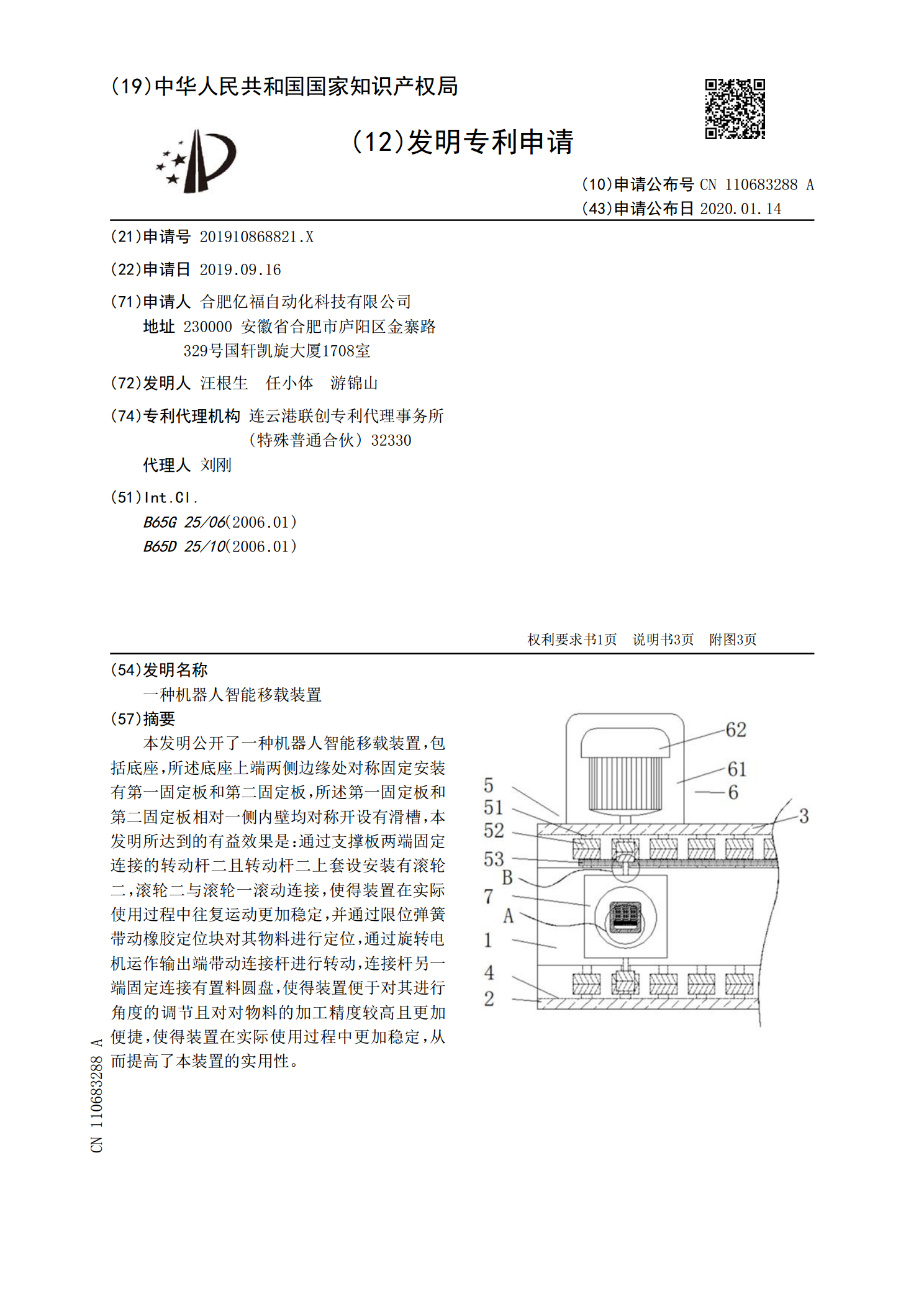
本发明公开了一种机器人智能移载装置,包括底座,所述底座上端两侧边缘处对称固定安装有第一固定板和第二固定板,所述第一固定板和第二固定板相对一侧内壁均对称开设有滑槽,本发明所达到的有益效果是:通过支撑板两端固定连接的转动杆二且转动杆二上套设安装有滚轮二,滚轮二与滚轮一滚动连接,使得装置在实际使用过程中往复运动更加稳定,并通过限位弹簧带动橡胶定位块对其物料进行定位,通过旋转电机运作输出端带动连接杆进行转动,连接杆另一端固定连接有置料圆盘,使得装置便于对其进行角度的调节且对对物料的加工精度较高且更加便捷,使得装置
一种移载装置及利用该移载装置完成移载过程的移载方法.pdf
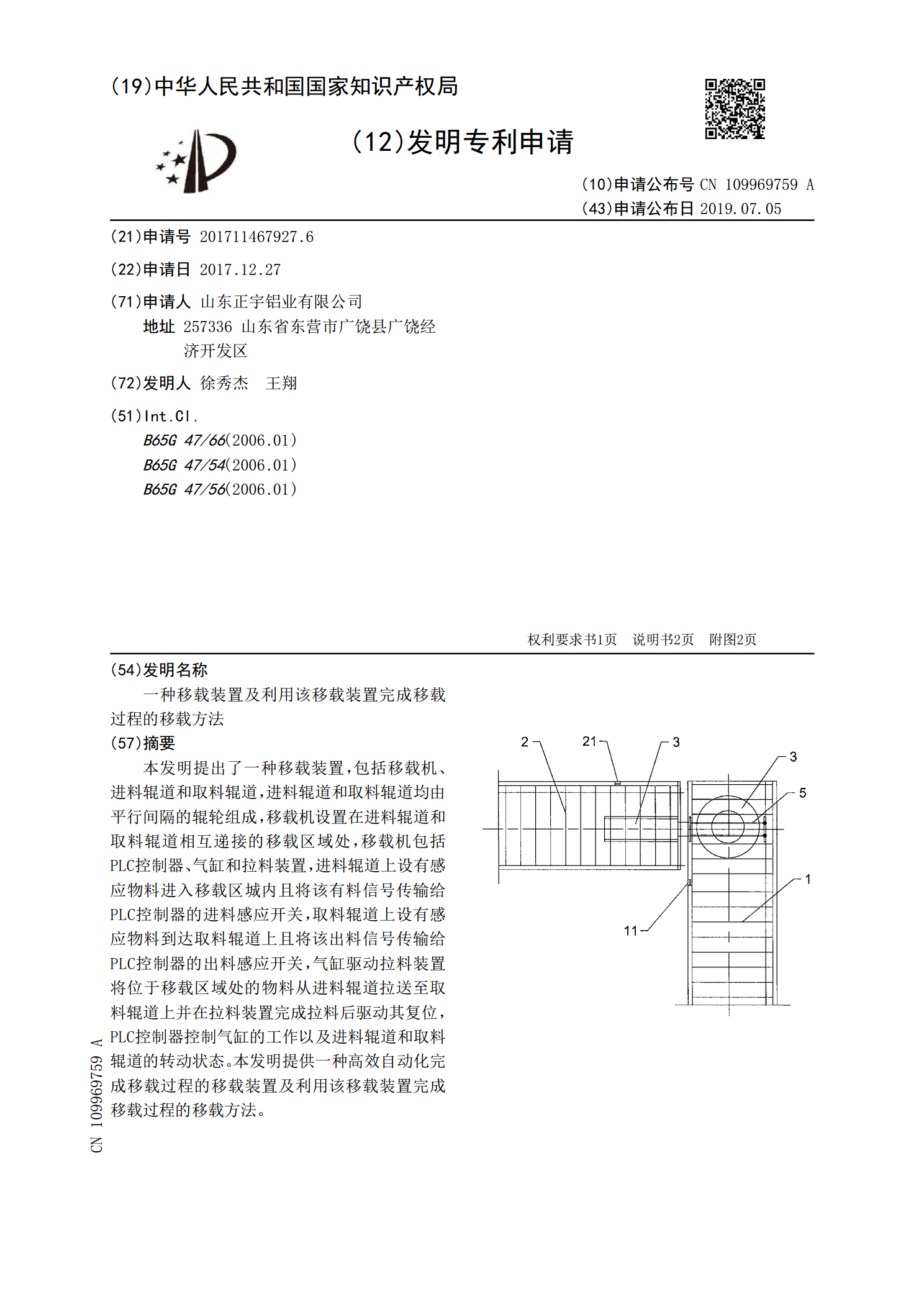
本发明提出了一种移载装置,包括移载机、进料辊道和取料辊道,进料辊道和取料辊道均由平行间隔的辊轮组成,移载机设置在进料辊道和取料辊道相互递接的移载区域处,移载机包括PLC控制器、气缸和拉料装置,进料辊道上设有感应物料进入移载区城内且将该有料信号传输给PLC控制器的进料感应开关,取料辊道上设有感应物料到达取料辊道上且将该出料信号传输给PLC控制器的出料感应开关,气缸驱动拉料装置将位于移载区域处的物料从进料辊道拉送至取料辊道上并在拉料装置完成拉料后驱动其复位,PLC控制器控制气缸的工作以及进料辊道和取料辊道的转
一种立体车库的智能快速移载装置.pdf
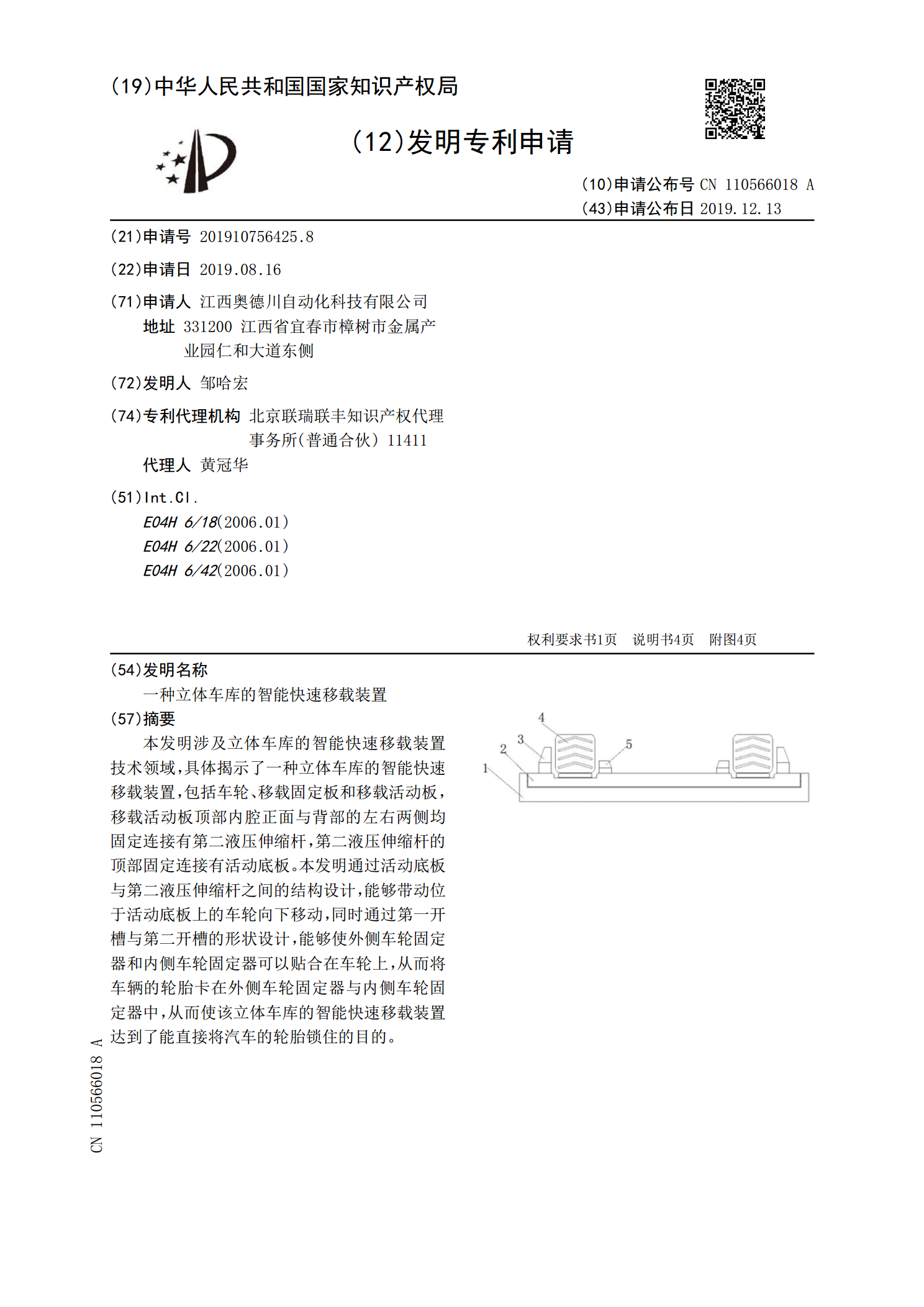
本发明涉及立体车库的智能快速移载装置技术领域,具体揭示了一种立体车库的智能快速移载装置,包括车轮、移载固定板和移载活动板,移载活动板顶部内腔正面与背部的左右两侧均固定连接有第二液压伸缩杆,第二液压伸缩杆的顶部固定连接有活动底板。本发明通过活动底板与第二液压伸缩杆之间的结构设计,能够带动位于活动底板上的车轮向下移动,同时通过第一开槽与第二开槽的形状设计,能够使外侧车轮固定器和内侧车轮固定器可以贴合在车轮上,从而将车辆的轮胎卡在外侧车轮固定器与内侧车轮固定器中,从而使该立体车库的智能快速移载装置达到了能直接将
一种移载装置.pdf
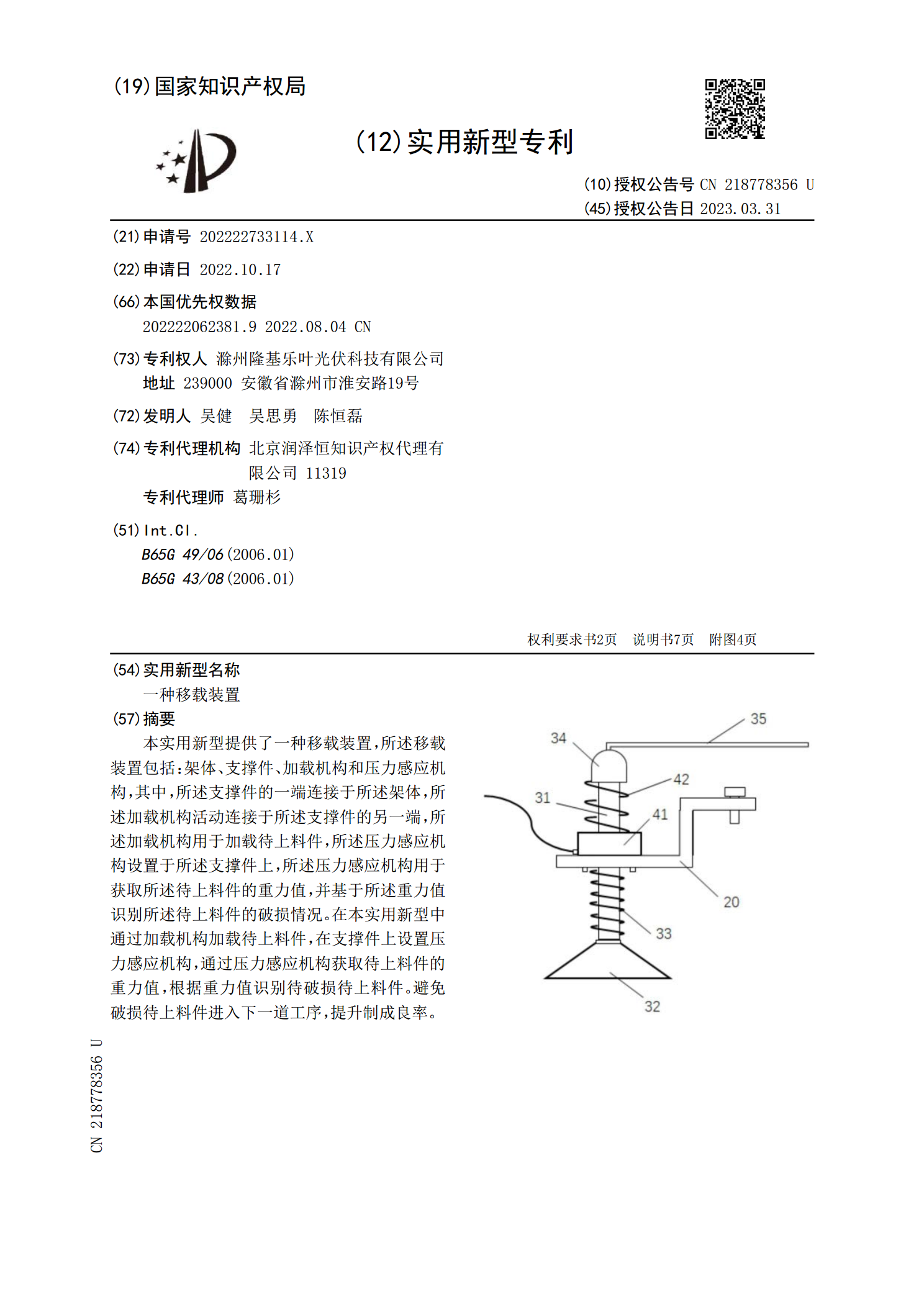
本实用新型提供了一种移载装置,所述移载装置包括:架体、支撑件、加载机构和压力感应机构,其中,所述支撑件的一端连接于所述架体,所述加载机构活动连接于所述支撑件的另一端,所述加载机构用于加载待上料件,所述压力感应机构设置于所述支撑件上,所述压力感应机构用于获取所述待上料件的重力值,并基于所述重力值识别所述待上料件的破损情况。在本实用新型中通过加载机构加载待上料件,在支撑件上设置压力感应机构,通过压力感应机构获取待上料件的重力值,根据重力值识别待破损待上料件。避免破损待上料件进入下一道工序,提升制成良率。
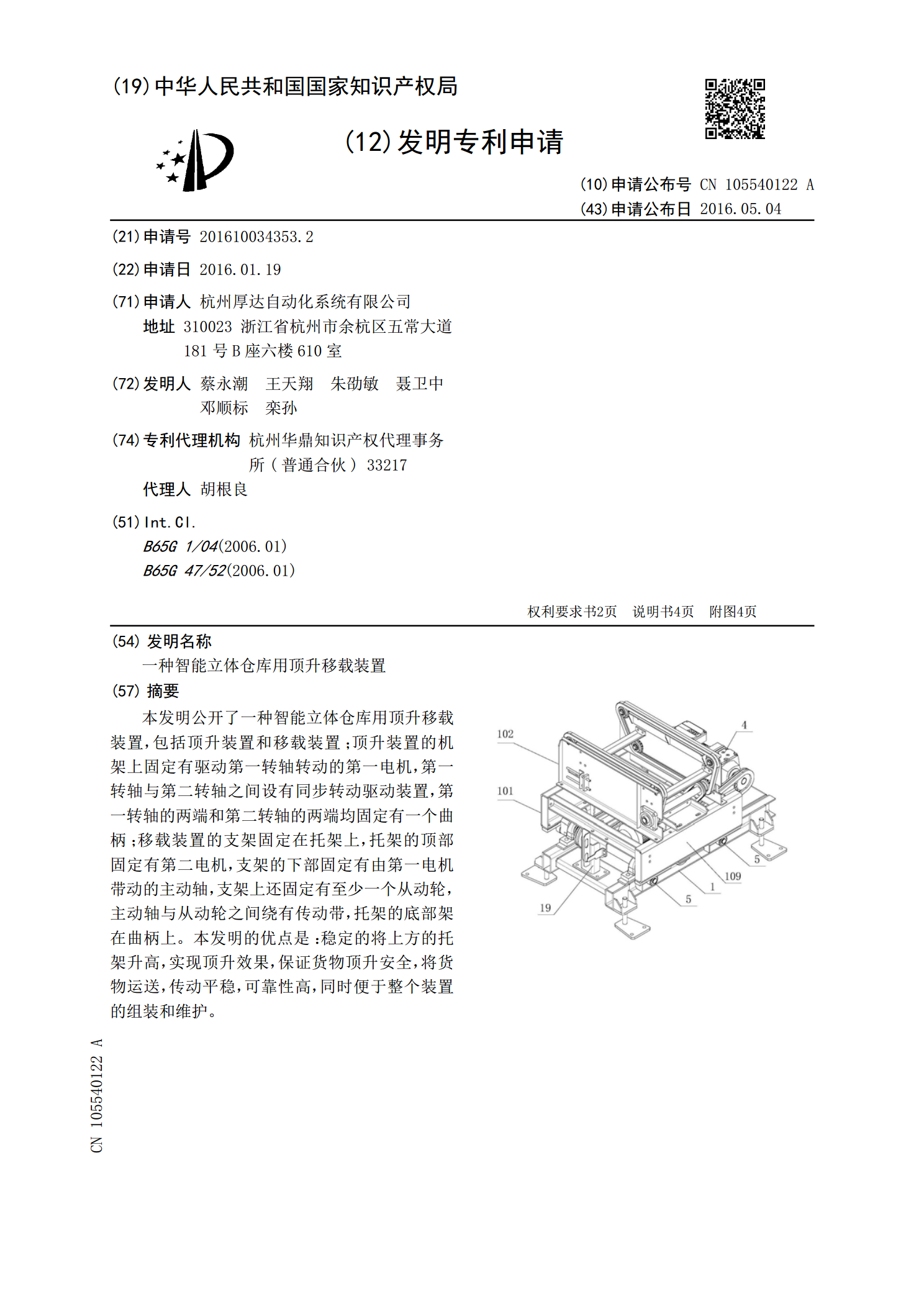
一种智能立体仓库用顶升移载装置.pdf
本发明公开了一种智能立体仓库用顶升移载装置,包括顶升装置和移载装置;顶升装置的机架上固定有驱动第一转轴转动的第一电机,第一转轴与第二转轴之间设有同步转动驱动装置,第一转轴的两端和第二转轴的两端均固定有一个曲柄;移载装置的支架固定在托架上,托架的顶部固定有第二电机,支架的下部固定有由第一电机带动的主动轴,支架上还固定有至少一个从动轮,主动轴与从动轮之间绕有传动带,托架的底部架在曲柄上。本发明的优点是:稳定的将上方的托架升高,实现顶升效果,保证货物顶升安全,将货物运送,传动平稳,可靠性高,同时便于整个装置的组