
履带式勘探机器人.pdf

睿达****的的

1/7
2/7
3/7

4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
履带式勘探机器人.pdf
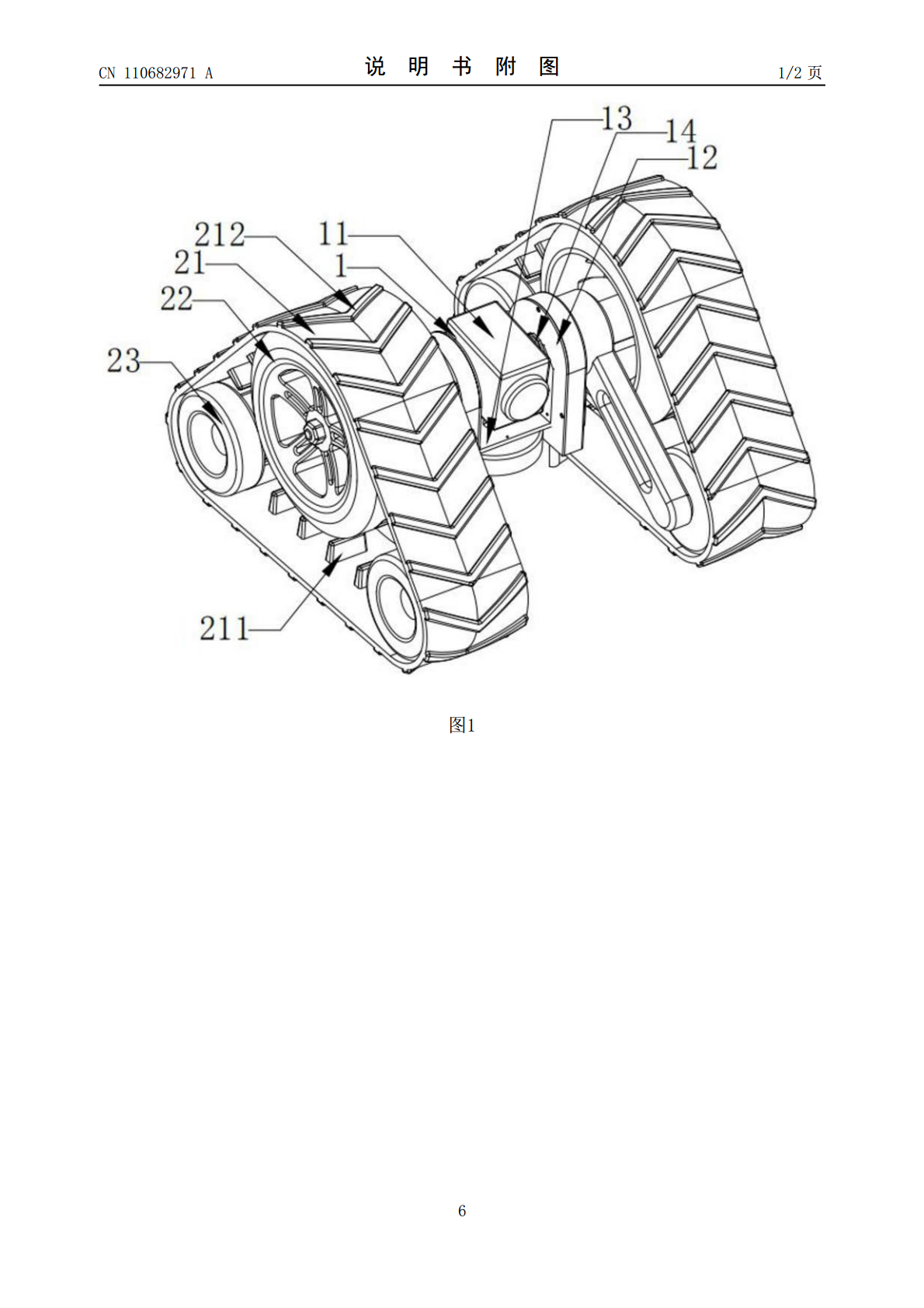
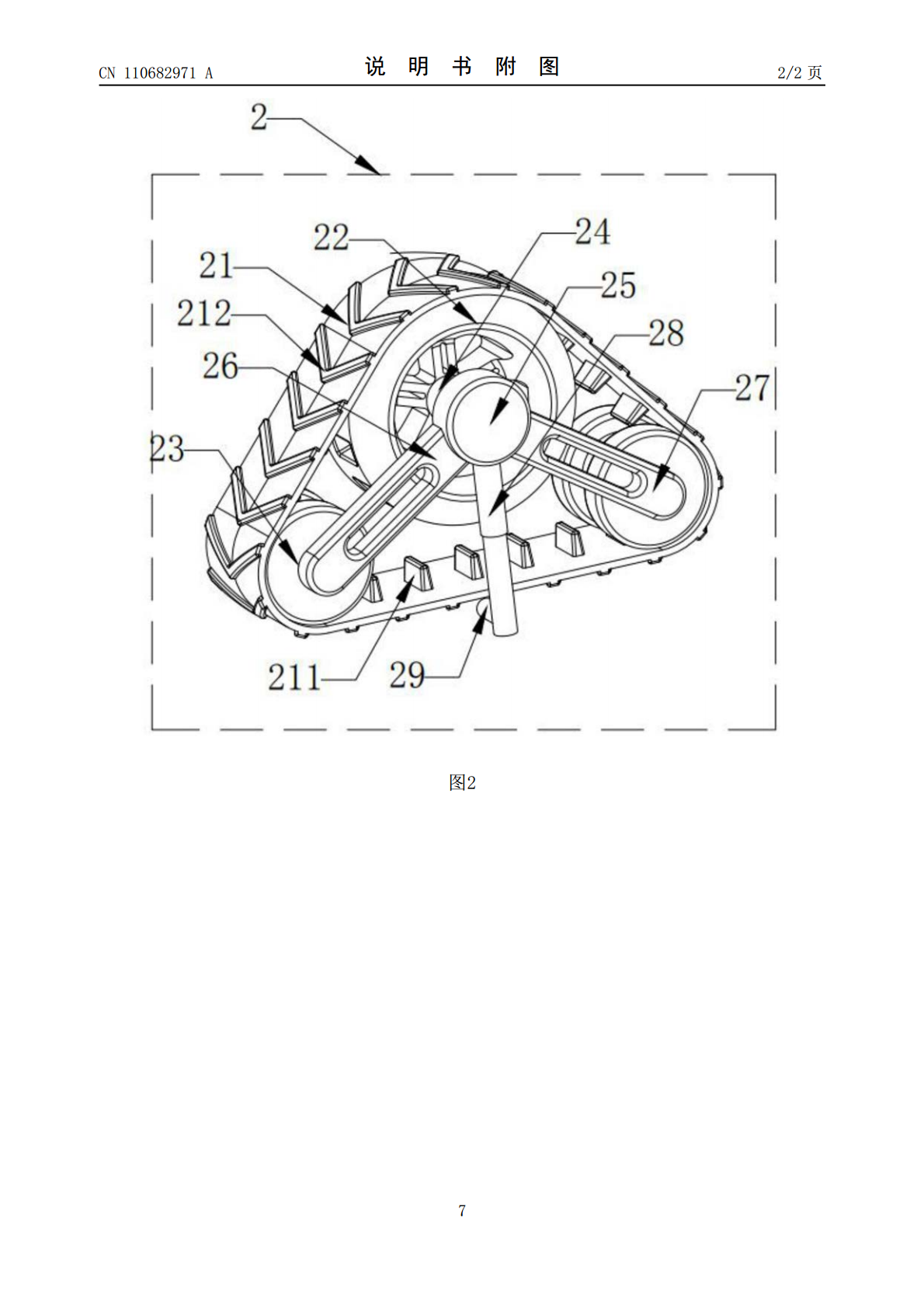
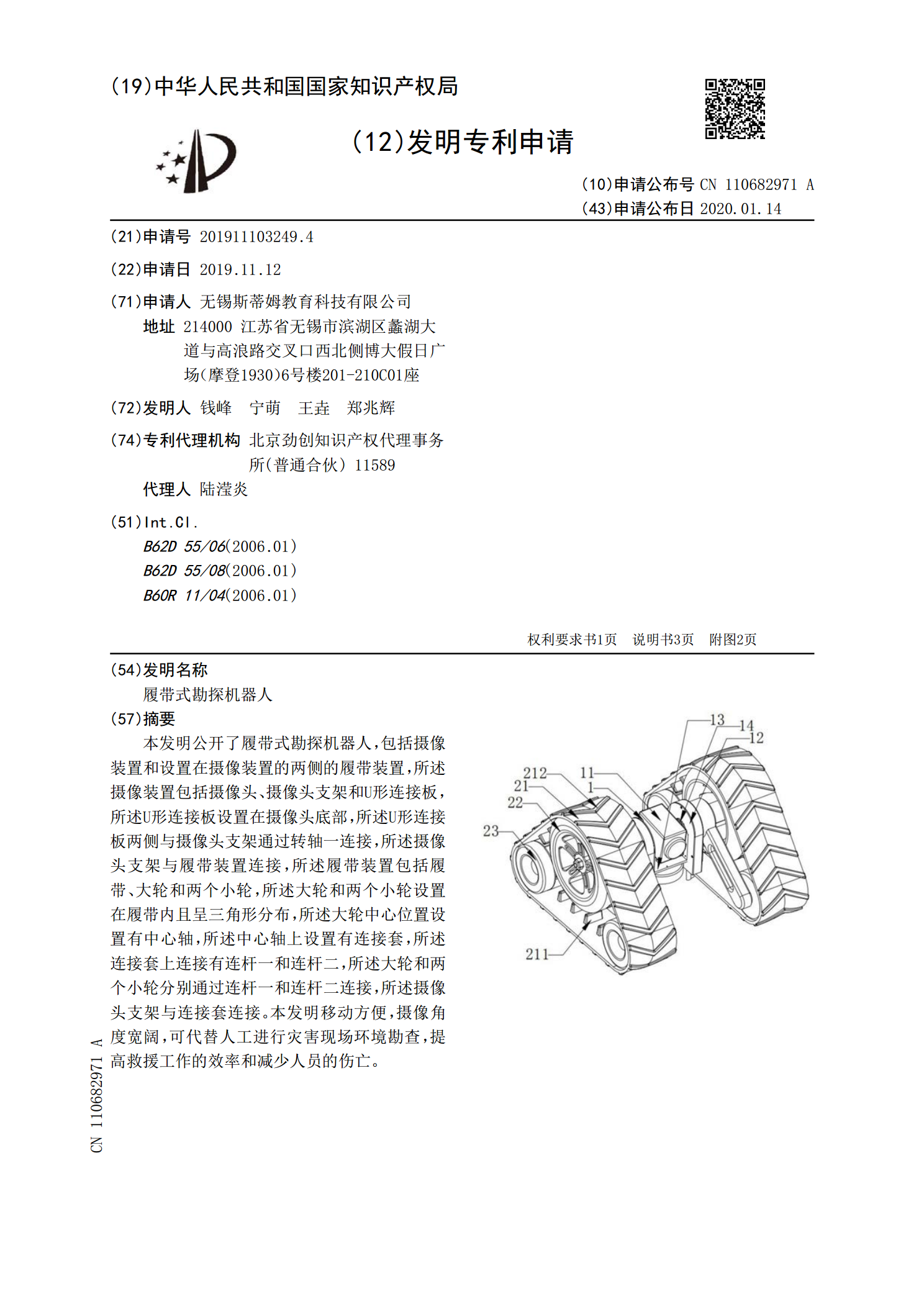
本发明公开了履带式勘探机器人,包括摄像装置和设置在摄像装置的两侧的履带装置,所述摄像装置包括摄像头、摄像头支架和U形连接板,所述U形连接板设置在摄像头底部,所述U形连接板两侧与摄像头支架通过转轴一连接,所述摄像头支架与履带装置连接,所述履带装置包括履带、大轮和两个小轮,所述大轮和两个小轮设置在履带内且呈三角形分布,所述大轮中心位置设置有中心轴,所述中心轴上设置有连接套,所述连接套上连接有连杆一和连杆二,所述大轮和两个小轮分别通过连杆一和连杆二连接,所述摄像头支架与连接套连接。本发明移动方便,摄像角度宽阔,

履带式行走机器人.doc
长春工业大学毕业设计论文1绪论1.1机器人发展概况在工业机器入问世30多年后的今天;机器人己被人们看作是一种生产工具。在制造、装配及服务行业,机器入的应用取得了明显的进步。由干传感器、控制、驱动及材料等领域的技术进步,通过智能机器人系统首次在制造领域以外的服务行业,开辟了机器人应用的新领域,让机器人作为“人的助手”,使人们的生活质量得以提高。目前在许多领域己经进行了很大的努力来开发服务机器入系统,并力争在较大范围内使用它们。这些机器人系统尽管有不同的应用领域,但它们所从事的工作仅限于维护保养、修理、运输、

履带式机器人设计.doc
摘要分析了国内外履带式机器人的研究现状,讨论了履带式机器人在机械结构、稳定性和控制方法等方面的现有研究方法,列举了履带式机器人研究中存在的问题,展望了履带式机器人的发展方向。在观察分析其他机器人的结构及经验的基础上,进行方案比较选定的设计,是一种履带式搜救机器人的移动平台,设计内容包括设计行走底盘、摆臂和移动平台的减速器,并对机器人的局部受力情况作了具体的分析。为发挥四履带双摆臂机器人的最佳越障性能,本文从运动学的角度,在固定双履带机器人越障机理的基础上,分析了四履带双摆臂机器人克服台阶、斜坡、沟道等典型

履带式消防机器人.pdf
本发明涉及一种履带式消防机器人,包括左行走总成、右行走总成、车体和悬挂系统,左行走总成和右行走总成均包括导向轮和多个负重轮,导向轮通过预张紧机构固定在车体上,预张紧机构包括导向轮支撑件、液压缓冲器和扭杆,导向轮安装在导向轮支撑件上,并使得导向轮与负重轮之间形成29°~32°的夹角,导向轮支撑件通过扭杆固定在车体上,液压缓冲器连接所述悬挂系统和导向轮支撑件;车体上安装有灭火装置。本发明的机器人可以在复杂的环境中越障行走,现场勘查灾情,将消防水炮等救援设备拖曳到现场进行抢险作业。

履带式机器人减震机构.pdf
本发明涉及一种履带式机器人,其包括第一支撑摆杆、第二支撑摆杆、第一连杆、第二连杆以及弹性部件,机器人包括机器人本体、第一承重轮、第二承重轮以及履带。第一承重轮、第二承重轮与履带啮合;第一支撑摆杆一端与第一承重轮连接,第二支撑摆杆一端与第二承重轮连接,第一支撑摆杆另一端与第二支撑摆杆另一端通过销轴铰接;第一连杆一端与机器人本体固定连接,第二连杆一端与弹性部件一端传动连接,第一连杆另一端与第二连杆另一端通过销轴铰接。本发明提出的履带式机器人减震机构通过支撑摆杆、连杆以及弹性部件的组合设置,可以极大地削弱外部冲