
一种四轴机械臂.pdf

梦影****主a


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种四轴机械臂.pdf
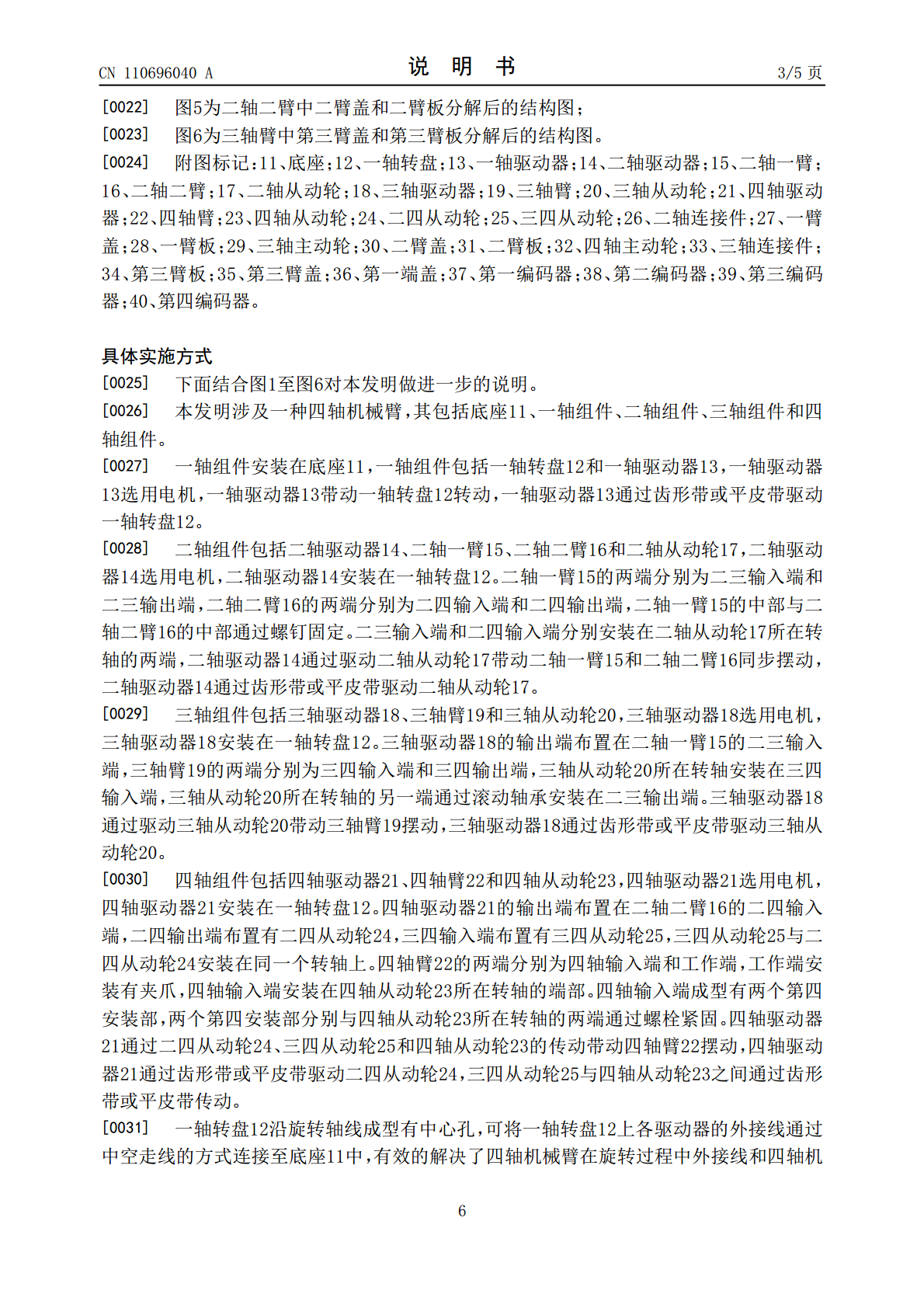
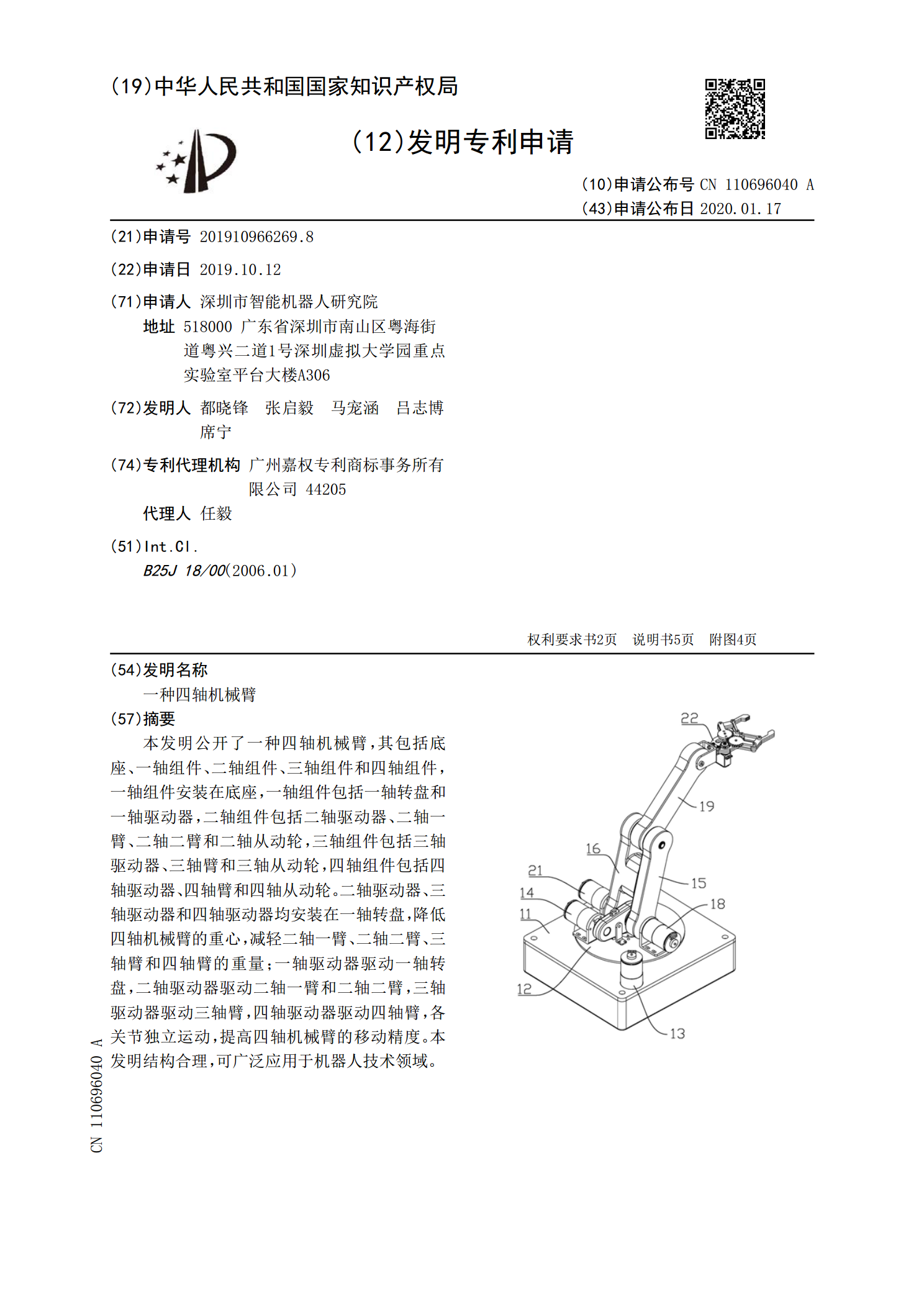
本发明公开了一种四轴机械臂,其包括底座、一轴组件、二轴组件、三轴组件和四轴组件,一轴组件安装在底座,一轴组件包括一轴转盘和一轴驱动器,二轴组件包括二轴驱动器、二轴一臂、二轴二臂和二轴从动轮,三轴组件包括三轴驱动器、三轴臂和三轴从动轮,四轴组件包括四轴驱动器、四轴臂和四轴从动轮。二轴驱动器、三轴驱动器和四轴驱动器均安装在一轴转盘,降低四轴机械臂的重心,减轻二轴一臂、二轴二臂、三轴臂和四轴臂的重量;一轴驱动器驱动一轴转盘,二轴驱动器驱动二轴一臂和二轴二臂,三轴驱动器驱动三轴臂,四轴驱动器驱动四轴臂,各关节独立

一种四轴旋转的机械臂.pdf
本发明公开了一种四轴旋转的机械臂,包括安装于底座上的第一机械臂,所述第一机械臂的顶端设有固定块,所述固定块为中空结构,所述固定块的内壁底端设有转动电机,所述转动电机通过输出轴连接有第一齿轮,所述固定块内活动设有第二齿轮,且第二齿轮设于第一齿轮的一侧,所述第一齿轮和第二齿轮啮合,所述第二齿轮上设转轴,且转轴延伸至固定块外,所述转轴远离第二齿轮的一侧设有第二机械臂,所述固定块的内壁上设有放置腔,所述放置腔内活动设有支架,且支架延伸至放置腔外。本发明提醒使用者齿轮润滑油不足,避免机械臂在使用过程中出现润滑油不足

一种三轴机械臂.pdf
本实用新型涉及一种三轴机械臂,它包括滑动连接在支架上的升降机构,与升降机构连接的摆臂、工作臂;第二驱动电机与摆臂驱动齿轮连接带动外齿圈上的摆臂旋转;第三驱动电机驱动工作臂的传动轴带动作业部旋转。所述传动轴两端分别与所述摆臂的前端、所述作业部转动连接。本实用新型的三轴机械臂体积小、重量轻、灵活性好,缩小了相应配套设备的体积,完全替代了人工,提高了配套设备的效率和安全性。
一种六轴机械臂.pdf
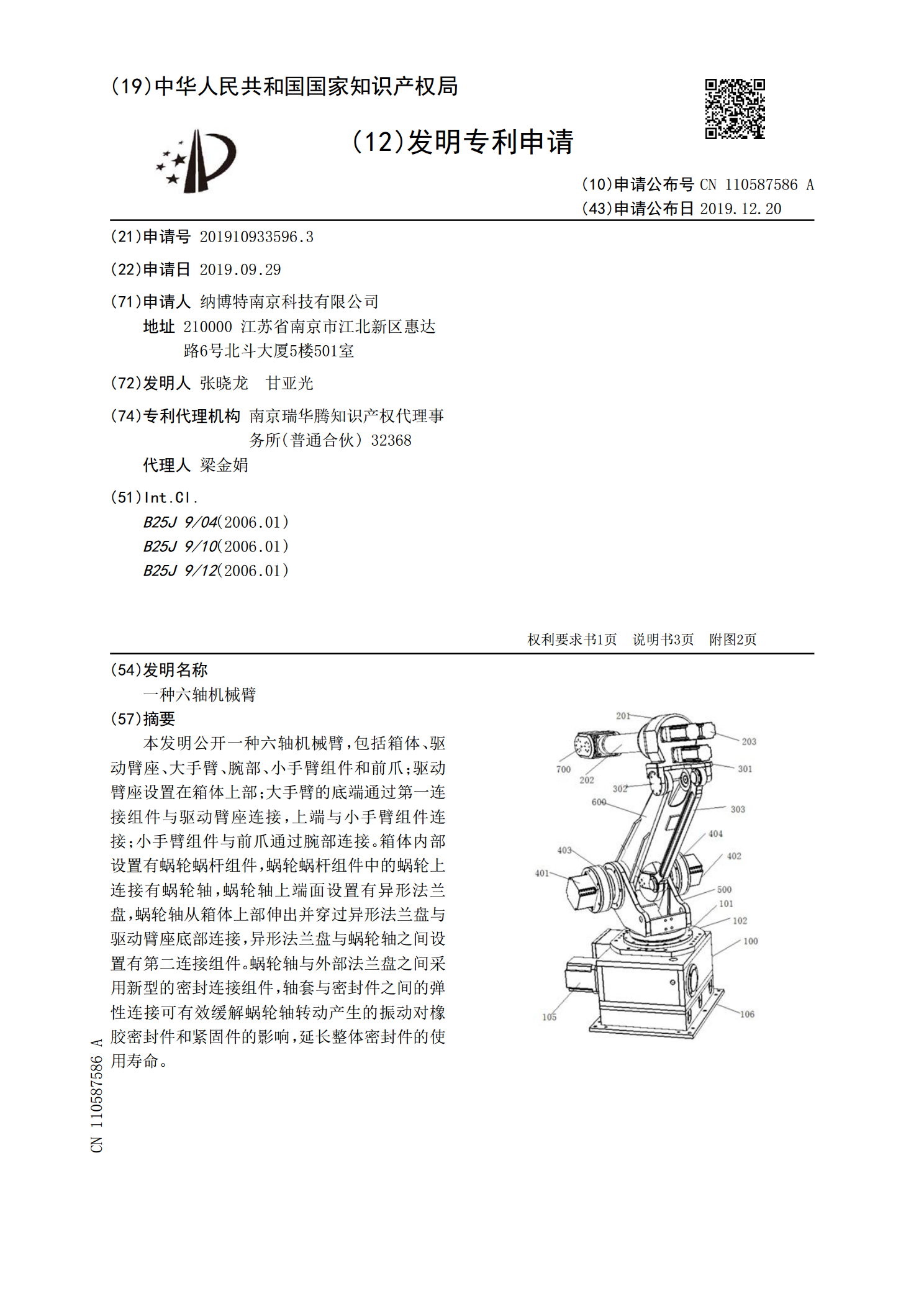
本发明公开一种六轴机械臂,包括箱体、驱动臂座、大手臂、腕部、小手臂组件和前爪;驱动臂座设置在箱体上部;大手臂的底端通过第一连接组件与驱动臂座连接,上端与小手臂组件连接;小手臂组件与前爪通过腕部连接。箱体内部设置有蜗轮蜗杆组件,蜗轮蜗杆组件中的蜗轮上连接有蜗轮轴,蜗轮轴上端面设置有异形法兰盘,蜗轮轴从箱体上部伸出并穿过异形法兰盘与驱动臂座底部连接,异形法兰盘与蜗轮轴之间设置有第二连接组件。蜗轮轴与外部法兰盘之间采用新型的密封连接组件,轴套与密封件之间的弹性连接可有效缓解蜗轮轴转动产生的振动对橡胶密封件和紧固

平面关节四轴机械臂.pdf
本发明公开了一种平面关节四轴机械臂,包括底座,底座上安装有第一电机和滚珠丝杆模组,第一电机与滚珠丝杆模组通过同步带连接,螺母组件上安装有第二电机和大臂,大臂的前端安装有第三电机和前臂,前臂的前端安装有第四电机和末端执行器;第一、第二、第三、第四电机通过EtherCAT线缆与PLC控制器连接。本申请通过采用一体化低压伺服电机作为机械臂关节轴,采用滚珠丝杠模组为第一轴,使用EtherCAT线缆连接各关节,使得机械臂质量轻,惯量小,集成度高,运动速度快,通讯带宽提升,响应性、稳定性增强。