
平面关节四轴机械臂.pdf

梅雪****67


1/6
2/6
3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

平面关节四轴机械臂.pdf
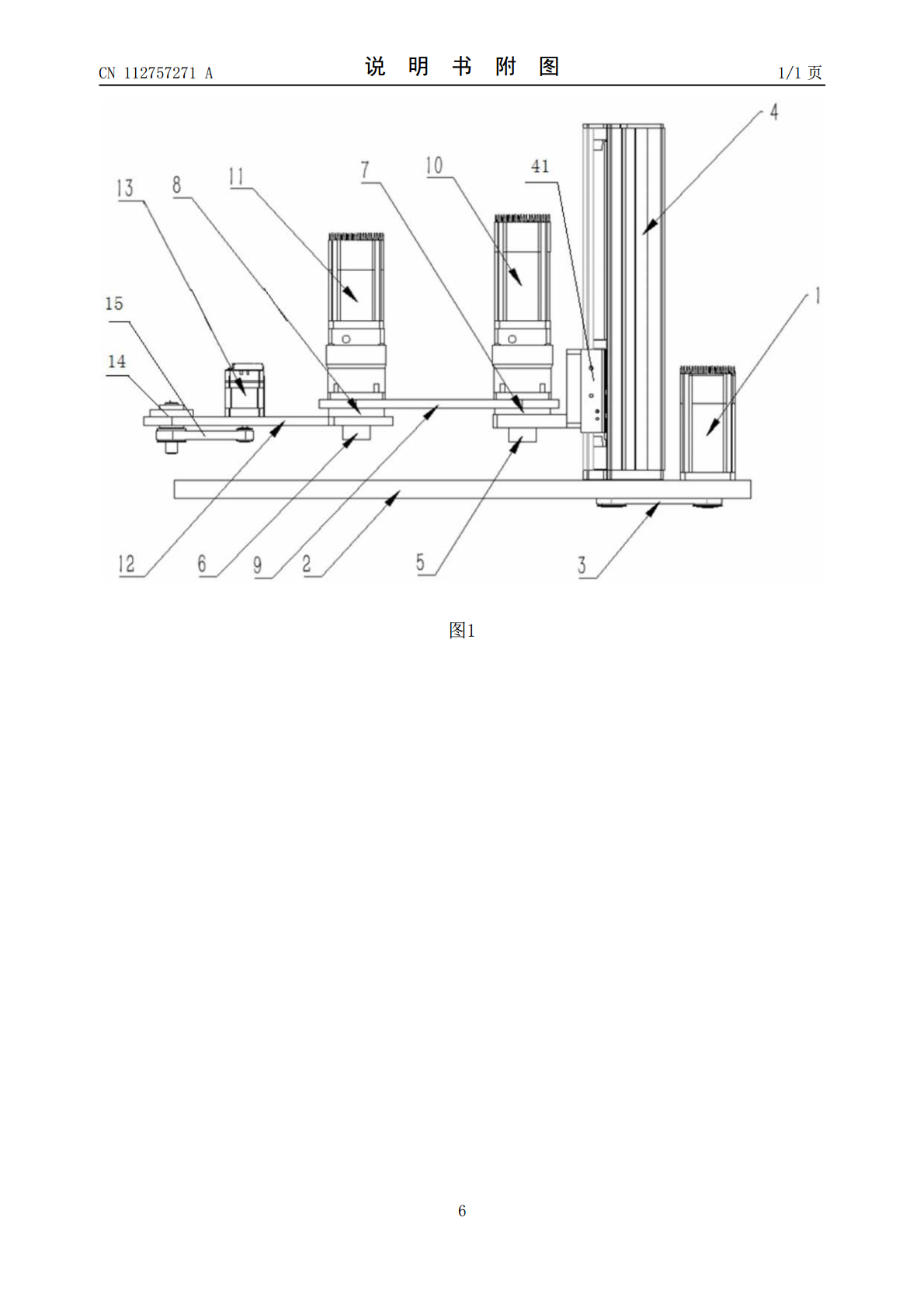
本发明公开了一种平面关节四轴机械臂,包括底座,底座上安装有第一电机和滚珠丝杆模组,第一电机与滚珠丝杆模组通过同步带连接,螺母组件上安装有第二电机和大臂,大臂的前端安装有第三电机和前臂,前臂的前端安装有第四电机和末端执行器;第一、第二、第三、第四电机通过EtherCAT线缆与PLC控制器连接。本申请通过采用一体化低压伺服电机作为机械臂关节轴,采用滚珠丝杠模组为第一轴,使用EtherCAT线缆连接各关节,使得机械臂质量轻,惯量小,集成度高,运动速度快,通讯带宽提升,响应性、稳定性增强。

一种具有偏置关节的六轴机械臂.pdf
本实用新型提供了一种具有偏置关节的六轴机械臂,包括底座、第一关节轴、第一外壳、第二关节轴、第二外壳、第三关节轴、第三外壳、第四关节轴、第四外壳、第五关节轴、第五外壳、第六关节轴和末端执行器,第一关节轴、第四关节轴与第六关节轴均竖直设置,第二关节轴、第三关节轴与第五关节轴均水平设置,第一关节轴、第二关节轴、第三关节轴、第四关节轴与第六关节轴均设置在六轴机械臂的中心线上,第五关节轴的中心线与六轴机械臂的中心线相互平行。本实用新型第五关节轴相对中心位置偏置,从而能够增加机械臂的工作空间,使末端执行器能够在更小的

多轴机械臂关节伺服系统的控制方法及系统.pdf
本申请提供一种多轴机械臂关节伺服系统的控制方法及系统,应用于机器人及其伺服技术领域,其中控制方法包括构建机械臂中各关节的伺服系统对应的加速度反馈闭环传递函数;从所述机械臂在工作期间容许的负载惯量的变化范围,按预设的选取策略确定各关节的伺服系统对应的负载惯量比R值;根据各轴加速度增益值具有最小增益偏差的约束关系,求解出各关节的伺服系统对应的加速度反馈增益k值;将各关节的伺服系统对应的负载惯量比R值及加速度反馈增益k值,用于该关节的伺服系统对应的所述加速度反馈闭环传递函数中。通过从机械臂整体结构的惯量变化角度
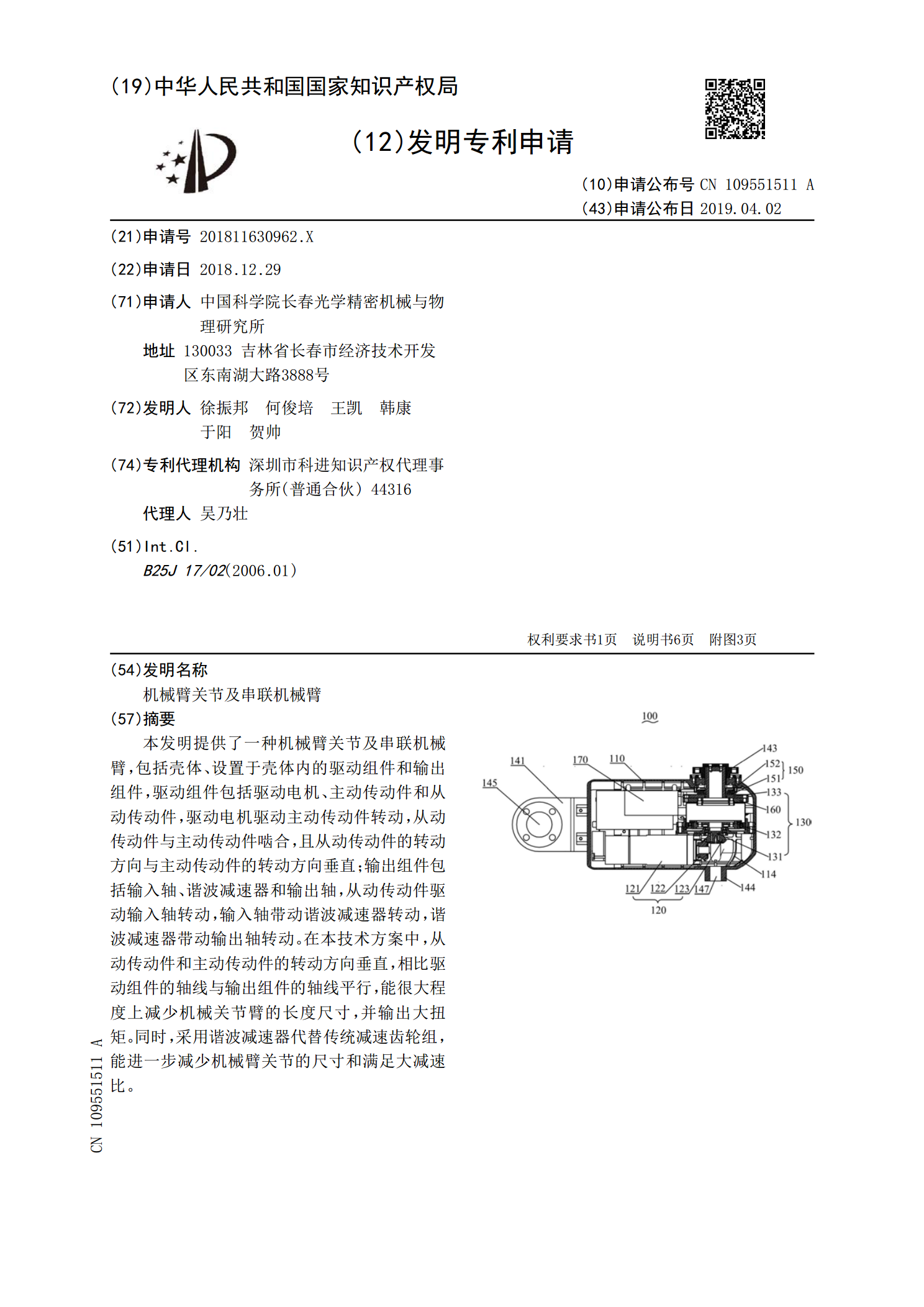
机械臂关节及串联机械臂.pdf
本发明提供了一种机械臂关节及串联机械臂,包括壳体、设置于壳体内的驱动组件和输出组件,驱动组件包括驱动电机、主动传动件和从动传动件,驱动电机驱动主动传动件转动,从动传动件与主动传动件啮合,且从动传动件的转动方向与主动传动件的转动方向垂直;输出组件包括输入轴、谐波减速器和输出轴,从动传动件驱动输入轴转动,输入轴带动谐波减速器转动,谐波减速器带动输出轴转动。在本技术方案中,从动传动件和主动传动件的转动方向垂直,相比驱动组件的轴线与输出组件的轴线平行,能很大程度上减少机械关节臂的长度尺寸,并输出大扭矩。同时,采用
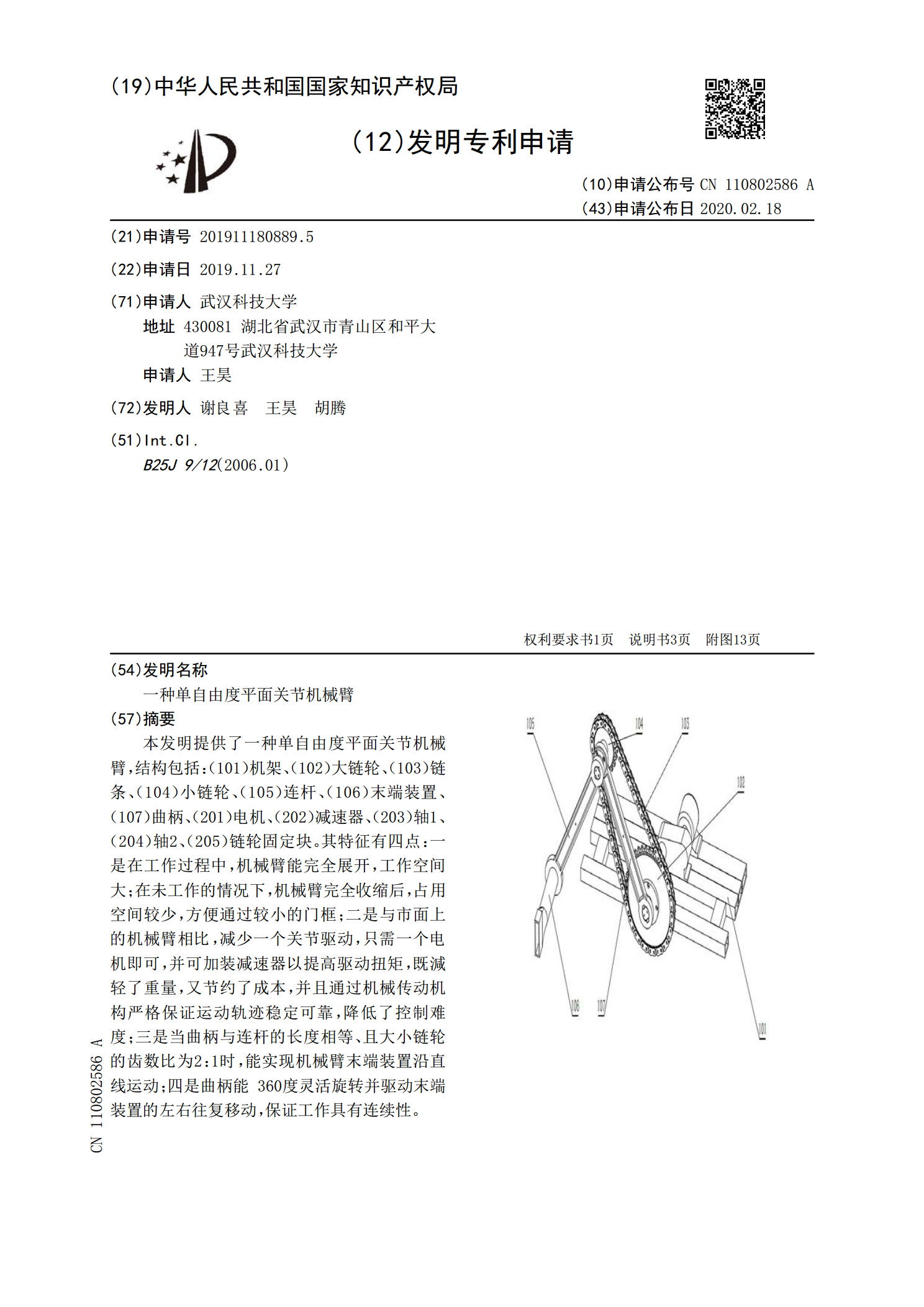
一种单自由度平面关节机械臂.pdf
本发明提供了一种单自由度平面关节机械臂,结构包括:(101)机架、(102)大链轮、(103)链条、(104)小链轮、(105)连杆、(106)末端装置、(107)曲柄、(201)电机、(202)减速器、(203)轴1、(204)轴2、(205)链轮固定块。其特征有四点:一是在工作过程中,机械臂能完全展开,工作空间大;在未工作的情况下,机械臂完全收缩后,占用空间较少,方便通过较小的门框;二是与市面上的机械臂相比,减少一个关节驱动,只需一个电机即可,并可加装减速器以提高驱动扭矩,既減轻了重量,又节约了成本,